Гидродвигатель ПР содержит поршень 1, цилиндр двустороннего действия 2, шток 3 с рукой и захватным устройством 4. Подача и отвод масла выполняется гидрозолотником 5. В состав гидродвигателя также входят манометр 6, аккумулятор 7, дроссель 8 (регулируется скорость перемещения выходного звена – руки ПР), сливной трубопровод 9 и бак 10, а также заборный трубопровод 11, гидронасос 12, электродвигатель13, предохранительный клапан 14 и фильтр 15.
К числу основных параметров гидродвигателя относятся: эффективные площади поршня в рабочей F1 и сливной F2полостях; ход поршня S; текущая координата x; скорость V и ускорение поршня а; масса mp руки ПР; давление масла в рабочей р1 и сливной р2 полостях; эффективные площади сечений трубопроводов в рабочей f1 и сливной f2 магистралях; диаметры поршня D и штока d; движущая сила РД и сила нагрузки РН.
Сила нагрузки определяется аналогично пневмодвигателю по формуле:
(15)
где Рт – суммарная сила трения в направляющих;
Ри – сила инерции, Ри = mрd2x/dt2
G – вес всех подвижных частей, если цилиндр расположен вертикально. Знак «+» при опускании поршня, знак «–» – при подъеме.
Движущая сила складывается из силы сопротивления и силы нагрузки:
(16)
где Рс – сила сопротивления масла в сливной магистрали, определяется произведением давления масла и площади поршня в сливной полости гидроцилиндра: .
Выбор основных параметров гидродвигателя, производится следующим образом.
В этом случае размеры цилиндра ПР связаны эмпирической зависимостью:
(17)
Размеры D и d подставляются в мм., а F1 и F2 получаются в см2.
Движущаяся сила определяется по формуле:
(18)
где kт – коэффициент, учитывающий потери на трение, kт = 09…0,98.
Рд подставляется в ньютонах, р – в мегапаскалях.
Расход масла и скорость поршня связаны зависимостями:
(19)
где Q – расход, л/мин;
V – скорость, м/мин.
При движении поршня влево:
; (20)
; (21)
. (22)
При заданном соотношении скоростей V1 и V2 (когда V1 < V2 и количество поступающего в цилиндр масла const) диаметр штока находят из выражения:
(23)
где D и d – в мм, а V1 и V2 – в м/мин.
Диаметр поршня D и его длину L выбирают из условий из условий компоновки узла ПР. Обычно рекомендуется L/D = 18…20, а для больших перемещений L/D>>18…20.
Параметры поворотного лопастного двигателя выбирают на основе следующих соотношений.
Движущий момент (в Нм) на выходном валу:
(24)
где р1 и р2 – давление в напорной и сливной полостях, МПа;
b – ширина лопасти, мм;
D и d – размеры гидродвигателя.
Угловая скорость (рад/с) поворота выходного вала:
(25)
где Q – расход масла, л/мин.
Параметры гидромотора выбирают на основе следующих соотношений.
Движущий момент на выходном валу:
(26)
где q – рабочий объем гидромотора, см3;
р1 и р2 – давление в напорной и сливной магистралях, МПа.
Частота вращения выходного вала (мин –1) определяется по формуле:
(27)
где Q – расход масла, л/мин.
Гидропривод применяют для роботов большой (50 – 100 кг) и сверхбольшой (более 100 кг) грузоподъемности. Он обладает высоким быстродействием при малой инерционности. Повышенной стабильностью скорости при изменении нагрузок благодаря несжимаемости рабочей жидкости. Бесступенчатым регулированием скорости, высоким коэффициентом усиления мощности. К недостаткам гидропривода относятся появление утечек, необходимость в насосной станции и зависимость скорости от температуры рабочей жидкости. Электрогидравлические приводы роботов применяются в основном двух классов: дроссельного управления и объемного управления, причем дроссельное управление различается на управление с гидронасосом постоянной производительности и переменной производительности. Во всех случаях может происходить управление либо гидроцилиндром, либо гидромотором.
Гидронасос постоянной производительности значительно дешевле, чем насос переменной производительности, однако энергетические характеристики привода дроссельного регулирования с насосом постоянной производительности хуже из-за больших непроизводительных потерь. Происходит обратный слив части жидкости и превращение части потенциальной энергии в тепловую, требуется охлаждение. Этих недостатков нет у привода дроссельного управления с насосом переменной производительности.
В связи с этим гидроприводы дроссельного управления с насосом постоянной производительности применяются в роботах меньшей грузоподъемности (десятки кг), а с насосом переменной производительности – в основном для роботов большой и сверхбольшой грузоподъемности (сотни кг).
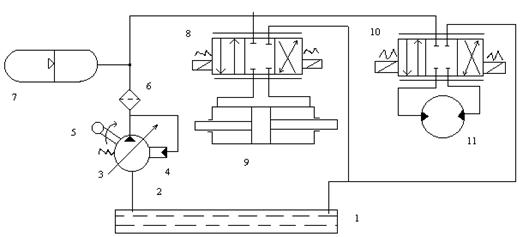
Схема гидравлического привода дроссельного управления с насосом переменной производительности показана на рис. 4.15.
Рис. 4.15. Гидропривод с насосом переменной производительности.
Рабочая жидкость забирается насосом из бака 1 через фильтр 2 с помощью насоса 3. Там имеется электродвигатель 5 и регулятор подачи насоса 4. Затем рабочая жидкость проходит фильтр тонкой очистки 6. Пневмогидравлический аккумулятор 7 служит для стабилизации давления в нагнетающей магистрали при резких его изменениях.
Гидродвигатель состоит из золотникового распределителя (8,10) и силового цилиндра 9 или гидромотора 11. Дросселирование потоков рабочей жидкости достигается путем изменения проходных сечений золотникового распределителя. Проходное сечение зависит от положения кромки золотника относительно проточки золотниковой втулки. Величиной проходного сечения, т.е. смещением золотника, определяется скорость перемещения гидродвигателя. Для улучшения характеристик данного типа привода в последнее время широкое применение находят приводы с пропорционально-дроссельным регулированием.
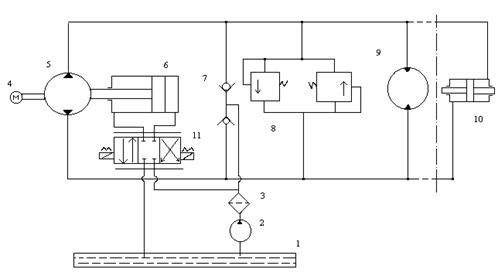
В ПР применяются также электрогидравлические приводы объемного регулирования (рис. 4.16 ), которые имеют лучшие энергетические и нагрузочные характеристики, чем окупается их более высокая стоимость. Такие приводы перспективны в основном для роботов большой и сверхбольшой грузоподъемности.
В этих приводах положение и скорость подвижной части гидропривода 9 или силового гилроцилиндра 10 регулируются не дроссельными золотниковыми устройствами, а с помощью изменения подачи гидронасоса 5 (с электромотором 4) по соответствующим командам управления. При этом насос 5 обладает реверсированием. Подача этого гидронасоса управляется микрогидроприводом дроссельного управления 6, питаемого через фильтр 3 гидронасосом постоянной подачи 2 из емкости рабочей жидкости 1. Насосом 2 производится подпитка всей системы через клапаны 7.
Таким образом, здесь имеется магистраль низкого давления для двигателей 9 и 10. Предохранительные клапаны 8 служат для исключения больших случайных перегрузок в магистрали. Важно отметить, что каждый гидродвигатель 9 и 10 имеет свою отдельную регулирующую систему, включающую в себя насос переменной производительности 5 с микроприводом дроссельного управления 6.
Расход жидкости в гидроцилиндре определяют как произведение скорости перемещения штока V на площадь поршня S (Q = VS), для предотвращения вибраций штока его длина l не должна превышать 18-20 диаметров поршня. Направление движения поршня зависит от того, в штоковую или поршневую полость подается рабочая жидкость. Усилие F на штоке зависит от разности давлений в поршневой Р1 и штоковой Р2 полостях:
F = SP1 – (S-s)P2 , где S – площадь поршня, s – площадь штока.
При одинаковом давлении в обеих полостях поршень гидроцилиндра будет двигаться вправо, вытесняя рабочую жидкость из штоковой полости, поскольку площадь сечения поршня больше разности площадей сечений поршня и штока.
Рис. 4.16. Гидропривод объемного регулирования.
В промышленных роботах используются также неполноповоротные лопастные гидродвигатели с диапазоном угла поворота, например до 270°. Они способны вести непосредственно звено манипулятора без промежуточных передач.

 (15)
(15) (16)
(16) .
. (17)
(17) (18)
(18) (19)
(19)
 ; (21)
; (21) . (22)
. (22) (23)
(23) (24)
(24) (25)
(25) (26)
(26) (27)
(27)