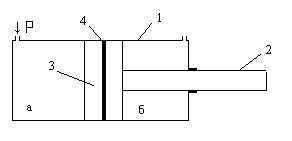
Торможение демпфером основано на гашении энергии движения. Наиболее широкое применение получили гидравлические демпферы (рис. 4.4.)и меньшее – механические.
Работа гидродемпфера происходит следующим образом. В момент торможения упор 1, взаимодействующий со штоком пневмодвигателя, утопляет подвижную часть демпфера – поршень 2 гидроцилиндра 3. За счет вытеснения масла через коническую щель 4 в полость 5 и происходит торможение поршня 2. Плавность торможения обеспечивается за счет выбора параметров демпфера: размеров конической щели 4, параметров дросселя 8 и пружины 7 аккумулятора 6. Размеры dд, b и l рассчитывают по известной скорости поршня и допускаемому тормозному ходу.
Рис.4.4. Схема гидродемпфера.
Сила демпфирования РД может быть определена по формуле:
(7)
где Δрз – перепад давления в кольцевом зазоре z;
dп – диаметр поршня демпфера.
Перепад давления Δрз определяется по формуле:
(8)
где μ – динамическая вязкость жидкости;
b – длина демпфирующего зазора;
vЗ – скорость жидкости в зазоре.
Из условия неразрывности потока жидкости имеем:
(9)
где v – скорость поршня исполнительного двигателя;
fЗ – площадь зазора.
Тогда окончательно получаем:
(10)
В механических демпферах энергия движущихся элементов привода и груза преобразуется в энергию сжатой пружины. Конструктивное оформление механического демпфера производится в виде цилиндрической пружины, заключенной в корпус. Пружинные демпферы применяются для приводов с грузоподъемностью до 1 кг., поскольку параметры пружины зависят от массы перемещаемых объектов манипулирования, а также от скорости.
Основным параметром пружины является сила пружины Рпр=ПД.
Торможение поршня с использованием рабочего теладостигается путем уменьшения расхода воздуха из полости опорожнения за счет установки специального дросселя (поз.7 рис.10) и позволяет изменять площадь выходного сечения f2 по закону f2= f(x). При этом меняется значение давления и формируется необходимый закон движения поршня, т.е. регулируется скорость его перемещения. Такой способ торможения возможен только благодаря высокой сжимаемости воздуха и используется для роботов с грузоподъемностью до 5 кг.
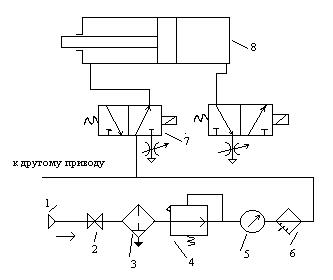
Другим способом торможения является способ, при котором используется схема создания противодавления в соответствующей полости двигателя. При достижении поршнем некоторого положения в полость опорожнения подается основное давление магистрали (рис.12).
Рис.4.5. Схема торможения противодавлением
Работа заключается в следующем. Сжатый воздух из магистрали питания через пневмораспределители 1 и 2 поступает в левую полость цилиндра. Правая полость через пневмораспределитель 5 и дроссель 4 сообщена с атмосферой. Поршень движется из левого положения в правое, при этом перепад давления на поршне Δр=р1-р2. По достижении поршнем положения 1-1 посредством системы управления ПР пневмораспределитель 5 переключается в другое положение (влево) и сжатый воздух из магистрали питания попадает в правую полость пневмоцилиндра. Давление в обоих полостях начинает выравниваться до р1=р2. Из-за разности площадей левой и правой частей поршня F1 и F2 на поршень действует сила Р= р1 (F1 – F2), под действием которой поршень будет двигаться с меньшей скоростью.
Для создания равновесия сил на поршне пневмораспределитель 2 должен переключиться одновременно с пневмораспределителем 5 и перекрыть доступ сжатого воздуха в левую полость цилиндра, которая будет представлять собой замкнутый объем V, для которого можно принять pV=const.
В случае равновесия на поршне:
(11)
где N – внешние силы (функциональное назначение).
Выражая площадь через диаметры получаем условие, характеризующее равновесие в полостях цилиндра через соотношение давлений:
(при Nвн=0) (12)
где D и d – диаметры поршня и штока соответственно.
Иначе последнюю формулу можно переписать в виде:
(13)
где X1Н и X1 – начальная и конечная координата поршня.
Данная формула получена из следующего выражения с учетом pV=const:
(14)
V1Н и V1 – начальный и конечный объем левой полости.
В реальных конструкциях d/D= 0,3...0,7. В этом случае X1=(1,1...2) X1Н. Тогда очевидно, что после подачи сигнала на останов (после переключение влево пневмораспределителя 5 влево) перемещение поршня может составлять от 10 до 100% от начального положения X1Н.
Приведенные зависимости не отражают полностью реальные условия эксплуатации, т.к. не учитывают сил инерции и пр. и показывают качественную картину происходящих процессов при торможении поршня противодавлением (учет сил инерции важен и обязателен во всех проектировочных, прочностных и иных расчетах!).
Рассмотренный метод торможения рабочим телом не является единственным. Существует множество других схем, но общим недостатком их является перенастройка демпфирования при изменении условий и характера внешней нагрузки.
Данный метод демпфирования применяется для роботов с грузоподъемностью до 1 кг.
Другим способом позиционирования служит применение механического тормоза, который служит для останова выходного звена. Торможение осуществляют в два этапа, на первом – уменьшается скорость выходного звена на 5–10% от максимальной. Здесь с помощью датчиков положения определяются точки торможения, в которых дальнейшее движение выходного звена начинает замедляться. На втором этапе происходит останов выходного звена в заданной точке с помощью тормоза.
Позиционное управление в пневмоприводах ПР применяется для широкого диапозона грузоподъемности от 0,1 до 20 кг. и скоростей от 500 до 1000 мм/с.
Применение следящего пневмопривода позволило бы решить задачу использования контурного управления ПР. В результате этого проблема точного, а также промежуточного позиционирования выходного звена ПР оказалась бы также решена. Однако применение следящего привода в пневматических устройствах ПР на практике применяется довольно редко, что связано с рядом обстоятельств, прежде всего со свойствами рабочего тела (воздуха).
Принципиальная схема следящего пневматического привода представлена на рис. 4.7-а.
Распределителем сжатого воздуха является струйный механизм 2, при отклонении которого в право и влево происходит пропорциональное изменение расхода воздуха в левую или правую полость цилиндра 1 через сопла приемника 3. На оси струйника расположен якорь электромагнитного преобразователя (ЭПМ) (на рисунке не показан). При разведении токов управления iу в обмотках управления наступает равновесие сил, действующих на якорь, который вместе с струйником находится в среднем положении. При наличии разности токов управления iу равновесие сил нарушается, якорь и струйник поворачиваются на угол , который пропорционален разности токов. Датчиком положения штока цилиндра является потенциометр обратной связи.
На рисунке рис. 14-бпредставлена структурная схема привода, осуществляющая управление по замкнутому циклу. Элемент сравнения U сравнивает управляющий сигнал с сигналом обратной связи и вырабатывает сигнал ошибки ε, который поступает на регулятор, состоящий из усилителя > и нелинейного элемента с зоной насыщения f и интегрирующего устройства 1/р.
f – ограничивает сигнал по величине, 1/р – повышает точность срабатывания.
Следящие пневмоприводы относятся к дроссельным системам регулирования, т.к. изменять расход на привод за счет изменения производительности компрессора, нагнетающего воздух, неперспективно из-за сжимаемости воздуха.
Принцип действия струйного распределителя основан на двойном преобразовании энергии. Сначала в струйной трубке потенциальная энергия сжатого воздуха преобразуется в кинетическую энергию потока струи воздуха, затем, в соплах приемника кинетическая энергия потока струи преобразуется в потенциальную энергию сжатого воздуха, поступающего в рабочие полости цилиндра. Потери давления при этом составляют до 10%.
Пневматический привод прост, надежен, дешев. Он отличается высоким быстродействием (до 1000 мм/с при линейном перемещении), но имеет серьезный недостаток, связанный с плохой управляемостью из-за используемого типа энергоносителя. Воздух сжимаем. Это затрудняет точное позиционирование по многим точкам рабочей зоны. Обычно позиционирование по каждой степени свободы производят в крайних точках и осуществляют его путем использования специальных тормозных устройств. Грузоподъемность ПР с пневмоприводом невелика – до 20 кг. Однако благодаря своим достоинствам этот тип привода получил широкое распространение, 40-50% мирового парка роботов используют пневмопривод.
Важной особенностью пневмопривода является то, что он, как правило, легко совмещается со звеньями манипулятора, обеспечивая тем самым непосредственное воздействие на них. Например, для поступательной кинематической пары 5-го класса можно использовать конструкцию привода, приведенную на рис.4.9.
Рис.4.9. Схема пневмоцилиндра.
В этой конструкции два элемента привода гильза 1 и шток 2, жестко связанный с поршнем 3, одновременно являются перемещающимися друг относительно друга звеньями манипуляционной системы ПР. Перемещение достигается путем изменения давлений Р1 и Р2 в левой и правой полостях пневмоцилиндра. Для лучшей изоляции этих полостей друг от друга между поршнем и гильзой помещается резиновое уплотнение 4.
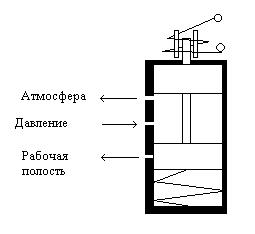
Для подачи воздуха в полость пневмоцилиндра или мембранной камеры применяют электропневмоклапаны прямого или обратного действия (рис. 4.10). При подаче напряжения в обмотку электроклапан обратного типа закрывает канал подвода воздуха, а клапан прямого типа открывает канал.
Рис.4.10.Электроклапан прямого типа.
Клапан прямого типа (рис.4.4) выполнен в виде подпружиненного золотника, который перемещается в цилиндрическом корпусе с тремя отверстиями. Верхнее отверстие соединено с атмосферой., нижнее – с одной из полостей пневмоцилиндра. К среднему отверстию подводят сжатый воздух. При подаче напряжения в обмотку золотник перемещается вниз и воздух через нижнее отверстие поступает в рабочую полость пневмопривода. Недостатком пневмопривода является то, что движение звена робота при включении клапана происходит с большой скоростью, сопровождаясь ударами звена об ограничивающие упоры. Для смягчения ударов на упорах устанавливают демпферы, однако это приводит к снижению точности позиционирования.
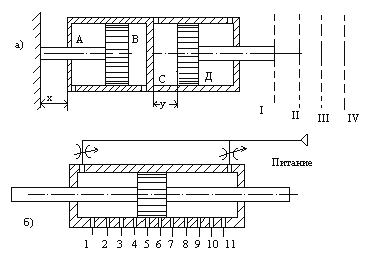
Рис. 4.11. Схемы цифровых пневмоприводов.
В случае необходимости иметь несколько точек позиционирования пневматические двигатели строят по схеме рис. 4.5. Для схемы по рис.4.5,а корпус 1 за счет работы левого цилиндра АВ может переместиться на величину х1, а выходной шток 2 за счет работы правого цилиндра СД – на величину х2, причем отношение х1/х2 = ½. Следовательно, если оба перемещения отсутствуют, на выходе имеем положение I, при перемещении только х1 получаем положение II, при перемещении только х2 – положение III, а при перемещении х1 + х2 - положение IV. Для получения большего числа позиций добавляют еще одну ступень цилиндра.
По второй схеме (рис. 4.11,б) несколько позиций осуществляются путем устройства нескольких выходных отверстий (1-7) в атмосферу, причем открывается одно из них. Например, если необходимо остановиться в позиции 4, то открывается это отверстие. Поршень остановится тогда, когда перекроет это отверстие,
Энергоустановка для пневмопривода может быть представлена в виде принципиальной схемы, приведенной на рис. 4.12. Она состоит из компрессора, запорного клапана 2, влагоотделителя 3, регулятора давления 4, манометра 5 и маслораспылителя 6. Если в цехе имеется пневмосеть, то ПР с пневмоприводом подсоединяется непосредственно к ней.
Рис. 4.12. Общая схема пневмопривода.
Подключение распределителя 7 соответствует перемещению поршня вправо. Из рисунка видно, что левая полость пневмоцилиндра соединена со входным клапаном, а правая – через дроссель 2 подсоединена к выходному каналу.
В ряде случаев в захватных устройствах применяют мембранные пневмоприводы. Мембранная камера представляет собой круглую мембрану, края которой закреплены между металлическими тарелками (рис. 4.13).
Рис. 4.13. Схема мембранного пневмопривода.
К центру мембраны прикреплен шток, через уплотнение выходящий наружу. При подаче сжатого воздуха между мембраной и одной из тарелок мембрана изгибается, перемещая штоком рабочее звено робота. Усилие перемещения штока составляет
F = Pπ/3 (R2 +Rr + r2)
Где Р – давление сжатого воздуха; r – радиус шайбы, к которой крепится шток; R – радиус защемления мембраны. Перемещение штока h ограничено степенью деформации мембраны, зависящей от ее радиуса: h = 0,25R. Если мембрана не плоская, а волнообразная, то ход штока увеличивается вдвое. При этом соотношение радиусов шайбы и мембраны должно быть в пределах r/R = 0,6 – 0,8.
Специально для роботов разработана «искусственная мышца», представляющая собой тонкую резиновую трубку в специальной оплетке. Концы оплетки соединены со звеньями манипулятора. При подаче воздуха в трубку она раздувается, в результате чего оплетка уменьшается в длину.
Гидравлические приводы.
Выше отмечалось, что область применения гидродвигателей для привода ПР достаточно высока и заключается в 30% серийно выпускаемых средних и тяжелых ПР. Погрешность позиционирования в этих приводах довольно мала и не превышает ± 0,5 мм при скорости линейного перемещения до 0,8…1200 мм/с. Гидродвигатели в ПР применяются, как правило, для переносных степеней подвижности.
Столь широкое применение гидропривода в конструкциях ПР объясняется прежде их достоинствами, такими как:
– высокая энергоемкость;
– быстродействие;
– малая инерционность;
– малая сжимаемость рабочей жидкости и за счет этого достаточно высокая жесткость статических нагрузочных характеристик;
– хорошая возможность реализации автоматического управления и регулирования скорости исполнительных механизмов;
– надежность работы и эксплуатации.
Недостатки: Эти приводы имеют сложную конструкцию, высокую стоимость изготовления и эксплуатации, а также возможность утечек и необходимость охлаждения рабочей жидкости.
В гидроприводах ПР применяются следующие основные типы гидродвигателей, которые иногда могут сочетаться с различными конструкциями механических передач:
– линейные гидроцилиндры с поступательным движением штока;
– поворотные гидродвигатели с ограниченным углом поворота;
– гидромоторы.
Все элементы гидро- и пневмоприводов стандартизованы и содержаться в справочной литературе.
В отличие от пневмодвигателей, для гидродвигателей предусмотрен блок питания, который входит в состав ПР. Он содержит гидронасос, дроссели, фильтры, регуляторы давления и другие устройства (рис. 4.14).

 (7)
(7) (8)
(8) (9)
(9) (10)
(10)
 (11)
(11) (при Nвн=0) (12)
(при Nвн=0) (12) (13)
(13) (14)
(14)