В последнее время в мировой и отечественной практике применения ПР электрический привод находит все большее применение. Их не применяют только в роботах, предназначенных для работы во взрывоопасных средах и для работы с машинами, оснащенными гидросистемами, по соображениям унификации.
Электроприводы новых серий ПР – это приводы с высокомоментными двигателями постоянного тока, бесколлекторными двигателями постоянного тока, силовыми шаговыми двигателями и реже асинхронными двигателями.
Особенностями электроприводов ПР являются расширенный диапазон малых моментов (всего до 0,05 Нм), повышенная максимальная частота вращения (до 15 × 103 об/мин), уменьшенная инерция двигателей, возможность встраивания в ЭД электромагнитных тормозов и различных датчиков, а также механических и волновых передач.
Основные достоинства применения электроприводов в ПР следующие:
– компактная конструкция двигателей;
– высокое быстродействие;
– равномерность вращения;
– высокий крутящий момент при максимальной скорости;
– высокая степень надежности;
– широкий диапазон регулирования по скорости и позиционированию, а также изменению моментов нагрузки;
– возможность длительной работы в заторможенном режиме;
– высокая точность срабатывания, которая обеспечивается применением цифровой измерительной системы и высокоточных импульсных датчиков;
– взаимозаменяемость двигателей;
– компактная конструкция различных преобразователей;
– низкий уровень шума и вибрации и доступность электроэнергии.
Недостатки применения электроприводов в ПР следующие:
– ограниченное использование во взрывоопасных средах;
– зависимость скорости выходного звена от внешней , что приводит к необходимости создания дополнительных контуров регулирования привода;
– наличие дополнительной кинематической цепи между электродвигателем и рабочим органом ПР.
Электропривод современного ПР представляет собой комплекс приводов, каждый из которых управляет отдельной степенью подвижности. наиболее распространены функциональные схемы, приведенные на рис. 4.17.
Рис. 4.17 – Функциональная схема управления электромеханического ,
Чаще всего ПР обладает шестью степенями подвижности, обозначенными на схеме как θ1…θ6. Все шесть электроприводов (ЭП1…ЭП6) управляются от общего центрального вычислительного устройства (ЦВчУ) системы программного управления (СПУ) ПР. Центральное вычислительное устройство выдает сигналы на цифровые регуляторы положения (ЦРП1….ЦРП6) отдельных приводов. Цифровые регуляторы положения управляют сервоприводами (СП1…СП6) в соответствии с сигналами ЦВчУ и датчиков угла (ДУ), например, кодовых датчиков угла с фотоэлектрическим преобразованием.
Одним из наиболее сложных и ответственных элементов в электроприводном ПР является сервопривод (СП).
Функциональная схема сервопривода ПР приведена на рис. 4.18.
Рис.4. 18 – Функциональная схема сервопривода ПР.
Данная схема представляет собой аналогово-цифровую систему автоматического управления, в которой сочетаются преимущества комбинированной аналоговой системы, работающей по принципу трехконтурной системы подчиненного регулирования, с достоинствами цифровой системы (высокая точность и удобство программирования).
Первый контур образован двигателем (М) с преобразователем (ПР) и регулятором тока (РТ). Во второй контур входят датчик скорости (ДС) и регулятор скорости (РС). В состав третьего контура дополнительно входят датчик угла (ДУ) и цифровой регулятор положения (ЦРП).
В качестве регуляторов скорости и тока в ПР чаще всего используются аналоговые, а в последнее время – и цифровые, операционные усилители с помощью которых легко реализуется практически любой требуемый закон управления. Датчик скорости также может быть как аналоговым, так и цифровым.
В ряде случаев применение датчика скорости не требуется, т.к. сигнал об изменении скорости может быть вычислен в цифровом регуляторе положения (ЦРП) путем дифференцирования сигнала с датчика угла (ДУ)
Таким образом анализ функциональных схем, приведенных на рис.16 и рис. 17, показывает, что независимо от конкретной схемы электропривод ПР состоит из следующих элементов:
– исполнительного элемента (двигателя);
– преобразователя;
– регуляторов тока, скорости и угла;
– и датчиков обратной связи по току, скорости и углу.
Современные тенденции развития робототехники таковы, что позволяют выпускать сервоприводы, которые конструктивно объединяют двигатель, преобразователь, датчики и регуляторы скорости и тока.
Для плавного перемещения звеньев робота наиболее удобны в эксплуатации электрические приводы. Они отличаются компактностью, быстродействием, регулируются в широких пределах, легко стабилизируются, имеют хорошие характеристики. Недостатки электроприводов: зависимость скорости от нагрузки, необходимость промежуточных передач от вала двигателя к звену робота.
Электрические приводы используются в 40…50% серийно выпускаемых ПР со средней грузоподъемностью и числом степеней подвижности 3…6. Точность позиционирования электрического привода достигает значений до ± 0,05 мм. Их применяют как в позиционном, так и в контурном режимах работы.
Электрические приводы классифицируются по способу регулирования – с постоянной мощностью, с постоянным крутящим моментом, двухзонные;
- по структуре системы автоматического управления – одноконтурные, многоконтурные;
- по способу управления – аналоговые, цифроаналоговые, цифровые.
Основные параметры электроприводов:
номинальный крутящий момент;
- номинальная выходная мощность;
- номинальная угловая скорость;
- диапазон регулирования;
- чувствительность- минимальный сигнал управления, отрабатываемый приводом;
- перегрузочная способность по мощности, крутящему моменту в установившемся и переходном режиме;
- время пуска и торможения;
- коэффициент полезного действия;
- удельные массогабаритные показатели;
- надежность, стоимость.
Преимуществами электроприводов являются более высокая экономичность, КПД, удобство сборки и хорошие регулировочные свойства.
Как правило, в электроприводах используют синхронные, шаговые и двигатели постоянного тока. Асинхронные двигатели применяются реже, что связано с трудоемкостью управления частотой вращения.
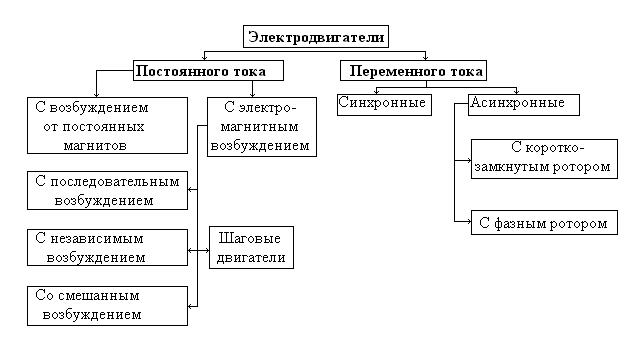
В исполнительном устройстве привода применяются различные типы электродвигателей рис4.19.
Рис. 4.19. Классификация электродвигателей.
Электродвигатели постоянного тока делятся на двигатели с электромагнитным возбуждением и с возбуждением от постоянных магнитов. Электромагнитное возбуждение может быть независимым, последовательным или смешанным. В роботах требуется регулирование скорости вращения в широком диапазоне, и производится оно по-разному. Наиболее перспективны в робототехнике двигатели постоянного тока с возбуждением от постоянных магнитов. Они отличаются меньшей инерционностью и более высоким КПД. Также электродвигатели могут быть коллекторными и бесконтактными. Последние обладают большей надежностью ввиду отсутствия трущихся о коллектор щеток.
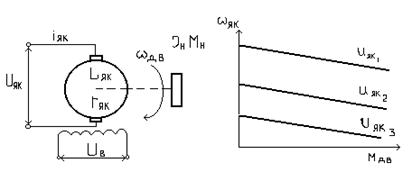
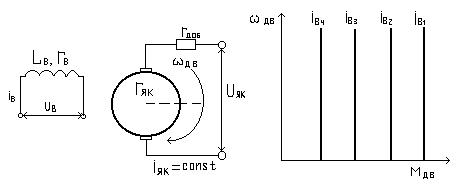
Приведем примеры схем электродвигателей постоянного тока с регулированием скорости вращения. Схема и характеристики электрического двигателя с независимым возбуждением и управлением по напряжению якоря представлены на рис. 4.20, а для электродвигателя с независимым возбуждением и управлением по току возбуждения - на рис.4.21.
Рис. 4.20. Электродвигатель с независимым возбуждением и управлением по напряжению якоря.
Из приведенных характеристик видна зависимость угловой скорости и момента от управляющих величин, соответственно напряжения в цепи якоря и тока в обмотке возбуждения.
Рис.4.21. Электродвигатель с независимым возбуждением и управлением по току возбуждения.
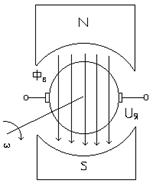
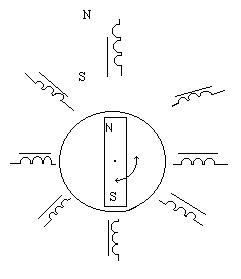
У двигателей с возбуждением от постоянных магнитов (рис. 4.22) на вращающемся роторе (якоре) имеется обмотка, к которой подводится напряжение U0 . Вокруг обмотки образуется электромагнитное поле, которое взаимодействует с магнитным полем постоянного магнита на статоре. Ротор поворачивается так, чтобы его магнитный поток совпадал с направлением магнитного потока статора, по инерции проходит положение равновесия и начинает вращаться относительно статора. Скорость вращения ЭД постоянного тока с возбуждением от постоянных магнитов регулируется путем изменения напряжения в цепи якоря при постоянном потоке возбуждения. Благодаря достаточно высокой коэрцитивной силе постоянных магнитов можно существенно повышать мощность двигателя вплоть до создания высокомоментных двигателей. Это весьма важно для применил их в робототехнике. Путем устройства полых или дисковых якорей можно значительно уменьшить инерционность двигателя и повысить его быстродействие.
Рис. 4.22. Электродвигатель с возбуждением от постоянных иагнитов.
Существуют различные принципы управления электродвигателями. В последнее время чаще всего используется тиристорное управление с помощью вентильных (тиристорных) преобразователей. Тиристор представляет собой управляемый полупроводниковый диод. Применение вентильных преобразователей для управления скоростью и реверсом электродвигателей постоянного тока привело к созданию бесконтактных двигателей. Вместо коллектора со щетками применяется полупроводниковая схема. Но тиристорное управление используется также и при управлении коллекторными двигателями, где они также имеют преимущество перед другими способами управления.
Перспективно применение в робототехнике электродвигателей переменного тока — асинхронных двухфазных (рис. 4.23) и трехфазных.
Обмотка возбуждения (ОВ) двухфазного асинхронного двигателя (рис. 2.51) питается от сети переменного тока. В обмотку управления (ОУ) поступает изменяемое напряжение Uy. Оно имеет по отношению к UB сдвиг по фазе на 90°. Асинхронные двигатели переменного тока, особенно трехфазные, имеют меньшую массу и габаритные размеры по сравнению с двигателями постоянного тока (при той же мощности) и обладают значительно большим ресурсом. Однако они применялись до сих пор в робототехнике редко ввиду трудностей построения схем управления в широком диапазоне, особенно при малых мощностях, распространенных в робототехнике. В настоящее время этот барьер также преодолевается.
Трехфазный электродвигатель имеет ротор с трехфазной обмоткой или короткозамкнутый ротор в виде «беличьего колеса». На статоре под углом 120º находятся три обмотки, одни концы которых соединены (если применяется схема «звезда»), а другие свободны. При подключении обмоток статора к источнику переменного трехфазного напряжения в статоре образуется вращающееся магнитное поле, которое заставляет вращаться ротор. У такого двигателя скорость мало изменяется при увеличении нагрузки, но после превышения некоторого значения двигатель останавливается («опрокидывается»). После этого начинают греться его обмотки.
Ротор синхронного двигателя выполнен в виде постоянного магнита, как у шагового двигателя, а на статоре размещены три обмотки, как у асинхронного двигателя. Скорость вращения синхронного двигателя зависит только от числа пар полюсов обмотки статора и частоты переменного напряжения.
Линейные двигатели переменного тока можно представить как электродвигатель вращения, у которого разрезали и развернули в линию статор с обмотками. При подключении напряжения в статоре образуется бегущее магнитное поле, заставляющее ротор двигаться вдоль статора. Скорость (до 1 м/с) изменяется также, как в обычных двигателях.
Шаговые электродвигатели также получили применение в приводах промышленных роботов. Ротор шагового двигателя выполнен в виде постоянного магнита (рис.4.24). На статоре размещены десятки обмоток, к которым подключают постоянное напряжение разной полярности.
Рис. 4.24. Схема шагового электродвигатея.
При подключении противоположных обмоток к напряжению с разной полярностью к ним притягиваются противоположные полюса постоянного магнита и ротор поворачивается. Если число обмоток велико, то поворот ротора происходит с высокой точностью на угол, заданный сочетанием обмоток, к которым приложено напряжение. В приводе с шаговым двигателем нет необходимости в датчиках обратной связи, как во всех предыдущих, для регулирования положения. Шаговые двигатели весьма различны по конструкции и принципам управления.
Выше говорилось об электродвигателях, создающих вращательное движение. Существуют и линейные электродвигатели различных конструкций, которые осуществляют поступательное перемещение. В последние годы появились многокоординатные приводы (в частности, двухкоординатные на плоскости), обладающие большой точностью позиционирования..
В последнее время большинство электродвигателей объединяют с системой управления, образуя комплектный электропривод, обеспечивающий поддержание постоянной скорости при переменных нагрузках и постоянного момента вращения при изменении скорости, переходные процессы без колебаний скорости и тока, высокую точность отработки управляющих воздействий, фиксацию вала электродвигателя электромагнитным тормозом при отключении питания. Комплектные электроприводы делятся на разомкнутые и следящие. Разомкнутые приводы состоят из источника питания, электронного коммутатора и двигателя (без обратной связи). Следящие приводы содержат приемное и следящее устройство, усилитель, датчики обратной связи, источник питания, электродвигатель. Следящие приводы могут быть с релейным или непрерывным управлением. При релейном управлении напряжение на двигатель подается только тогда, когда рассогласование заданного и фактического параметров (скорости, положения звена, ускорения) превыщает определенный порог. При непрерывном управлении напряжение зависит от величины рассогласования.
Для манипулирования миниатюрными изделиями применяются новые типы двигателей — прецизионные высокочастотные вибродвигатели. По принципу действия они являются пьезоэлектрическими двигателями. Существует много их разновидностей, как для поступательных, так и для вращательных перемещений с микронными точностями и с большим диапазоном регулирования скорости. Вибродвигатели основаны на преобразовании высокочастотных упругих колебаний звеньев в виде стоячих или бегущих волн. Преобразуемые колебания имеют частоты с малыми амплитудами в ультразвуковом диапазоне. Такие вибродвигатели могут иметь несколько степеней подвижности для твердых звеньев. Если применить эластичные звенья из пьезоактивных материалов, то можно получить гибко деформирующиеся манипуляторы.
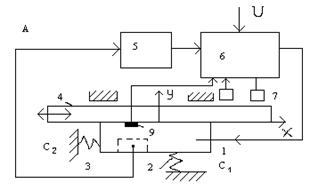
Типовая схема высокочастотного вибродвигателя представлена на рис. 4.25.
К подвижному звену 4 с помощью упругих элементов 2 и 3 (жесткость cl > с2) прижат вибропреобразователь 7. Он подключен к блоку 5, являющемуся генератором электрических колебаний. Блок управления 6 задает вибропреобразователю 1 колебания требуемой формы и вида в зависимости от сигнала управления U. Возбуждаются двумерные колебания, причем возникает постоянная составляющая силы по оси х , чем и приводится в движение звено 4. Могут осуществляться различные обратные связи: по положению 7, по скорости 8, по силе 9, по амплитуде колебаний. Цепь А служит для стабилизации процесса возбуждения колебаний.
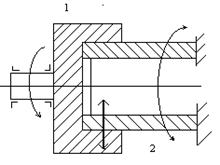
Возможна и упрощенная схема вибродвигателя с радиально-крутильными колебаниями активного элемента 2 (частота колебаний), генерирующими вращательное движение ротора 1 со скоростью (рис.4.16).
Рис. 4.26. Схема вибродвигателя с радиально-крутильными колебаниями активного элемента
Особенности вибродвигателей:
- высокая разрешающая способность по перемещению, 1 -10 мм в режиме преобразования колебаний и 0,01 мм при использовании управляемых деформаций преобразователей;
- высокое динамическое качество переходных режимов движения. Время разгона для большинства ВД равно единицам миллисекунд, время торможения на 20-30 процентов меньше;
- в выключенном состоянии подвижный элемент заторможен силами трения, а зона нечувствительности близка к разрешающей способности двигателя
- ВД обладают большим диапазоном регулирования скорости – до 106;
- в зависимости от исполнения число степеней подвижности ВД составляет 1-5 (при использовании твердых звеньев;
- сильные магнитные и радиационные поля почти не влияют на работу ВД, температурный режим от температур близких к абсолютному нулю до 250 градусов.
недостатки
-повышенный износ контактирующих поверхностей;
- необходимость использования датчиков обратной связи;
-малая грузоподъемность, малые усилия (скорость 0,1 м/сек, усилие 1,2 Н, частоты от 20 кГц до 5 мГц).
Линейные двигатели ВИБ 18, ВИБ 19.
КОНТРОЛЬНЫЕ ВОПРОСЫ:
1. В чем состоят преимущества пневмопривода?
2. Что представляет собой гидропривод дроссельного регулирования?
3. Какие устройства предназначены для изменения направления движения гидропривода?
4. Какие типы электроприводов применяются в промышленных роботах?
5. Как классифицируются приводы роботов?
Наиболее важными компонентами любого компьютера, обусловливающими его основные характеристики, являются микропроцессоры, системные платы и интерфейсы.
Микропроцессор (МП), или Central Processing Unit (CPU) — функционально законченное программно управляемое устройство обработки информации, выполненное в виде одной или нескольких больших (БИС) или сверхбольших (СБИС) интегральных схем.
Микропроцессор выполняет следующие функции:
□ вычисление адресов команд и операндов;
□ выборку и дешифрацию команд из основной памяти (ОП);
□ выборку данных из ОП, регистров МПП и регистров адаптеров внешних устройств (ВУ);
□ прием и обработку запросов и команд от адаптеров на обслуживание ВУ;
□ обработку данных и их запись в ОП, регистры МПП и регистры адаптеров ВУ;
□ выработку управляющих сигналов для всех прочих узлов и блоков ПК;
□ переход к следующей команде.
Основными параметрами микропроцессоров являются:
□ разрядность;
□ рабочая тактовая частота;
□ размер кэш-памяти;
□ состав инструкций;
□ конструктив;
□ рабочее напряжение и т. д.
Разрядность шины данных микропроцессора определяет количество разрядов, над которыми одновременно могут выполняться операции; разрядность шины адреса МП определяет его адресное пространство.
Адресное пространство — это максимальное количество ячеек основной памяти, которое может быть непосредственно адресовано микропроцессором.
Рабочая тактовая частота МП во многом определяет его внутреннее быстродействие, поскольку каждая команда выполняется за определенное количество тактов. Быстродействие (производительность) ПК зависит также и от тактовой частоты шины системной платы, с которой работает (может работать) МП.
Кэш-память, устанавливаемая на плате МП, имеет два уровня:
□ L1 — память 1-го уровня, находящаяся внутри основной микросхемы (ядра) МП и работающая всегда на полной частоте МП (впервые кэш L1 был введен в МП i486 и в МП i386SLC);
□ L2 — память 2-го уровня, кристалл, размещаемый на плате МП и связанный с ядром внутренней микропроцессорной шиной (впервые введен в МП Pentium II). Память L2 может работать на полной или половинной частоте МП. Эффективность этой кэш-памяти зависит и от пропускной способности микропроцессорной шины.
Состав инструкций — перечень, вид и тип команд, автоматически исполняемых МП. От типа команд зависит классификационная группа МП (CISC, RISC, VLIW и т. д.). Перечень и вид команд определяют непосредственно те процедуры, которые могут выполняться над данными в МП, и те категории данных, над которыми могут применяться эти процедуры. Дополнительные инструкции в небольших количествах вводились во многих МП (286, 486, Pentium Pro и т. д.). Но существенное изменение состава инструкций произошло в МП i386 (этот состав далее принят за базовый), Pentium ММХ, Pentium III, Pentium 4.
Конструктив подразумевает те физические разъемные соединения, в которые устанавливается МП и которые определяют пригодность материнской платы для установки МП. Разные разъемы имеют разную конструкцию (Slot — щелевой разъем, Socket — разъем-гнездо), разное количество контактов, на которые подаются различные сигналы и рабочие напряжения.
Рабочее напряжение также является фактором пригодности материнской платы для установки МП.
Первый микропроцессор был выпущен в 1971 году фирмой Intel (США) — МП 4004. В настоящее время разными фирмами выпускается много десятков различных микропроцессоров, но наиболее популярными и распространенными являются микропроцессоры фирмы Intel и Intel-подобные.
Все микропроцессоры можно разделить на группы:
□ CISC (Complex Instruction Set Command) с полным набором системы команд;
□ RISC (Reduced Instruction Set Command) с усеченным набором системы ко¬манд;
□ VLIW (Very Length Instruction Word) со сверхбольшим .командным словом;
□ MISC (Minimum Instruction Set Command) с минимальным набором системы команд и весьма высоким быстродействием и т. д.