Существенным недостатком всех рассмотренных способов регулирования скорости асинхронного двигателя при является возрастание потерь энергии в роторной цепи при снижении скорости пропорционально скольжению. Однако у двигателя с фазным ротором этот недостаток может быть устранен путем включения в цепь ротора источника регулируемой ЭДС, с помощью которого энергию скольжения можно либо возвратить и сеть, либо использовать для совершения полезной работы.
Схемы асинхронного электропривода с включением в цепь ротора дополнительных ступеней преобразования энергии для использования и регулирования энергии скольжения получили название каскадных схем (каскадов). Если энергия скольжения преобразуется для возвращения в электрическую сеть, каскад называют электрическим. Если энергия скольжения с помощью электромеханического преобразователя преобразуется в механическую энергию и поступает на вал двигателя, то такие каскады называются электромеханическими.
Электрические каскады, в которых цепь ротора подключается к преобразователю частоты, способному как потреблять энергию скольжения, так и доставлять энергию двигателю со стороны ротора на частоте скольжения, т. е. управлять потоком энергии в цепи ротора как в прямом, так и в обратном направлении, называются каскадами с асинхронным двигателем, работающим в режиме машины двойного питания (МДП). Схема такого каскада представлена на рис. 8.38,а.
Анализ этой схемы позволяет выявить наиболее общие закономерности, свойственные электроприводам с каскадным включением асинхронных двигателей. В установившихся режимах работы любой электрической машины поля статора и ротора для создания постоянного момента должны быть взаимно неподвижны. Поэтому если в схеме рис. 8.38,а задание частоты не зависит от нагрузки двигателя, то скорость двигателя в пределах допустимой перегрузки остается неизменной:
Такой режим работы называется синхронным режимом МДП. Для его математического описания воспользуемся уравнениями механической характеристики обобщенной машины в осях х, у так как
поля ротора и статора вращаются в рассматриваемом режиме со скоростью При записи по аналогии с синхронной машиной, ориентируем все переменные относительно вектора напряжения подводимого к ротору:
В синхронном режиме синхронного двигателя момент определяется углом причем ось поля ротора совпадает с направлением вектора В синхронном режиме МДП ток ротора имеет частоту
которая в общем случае не равна нулю. При этом изменения нагрузки и скольжения вызывают изменения угла сдвига поля ротора относительно напряжения поэтому вектор напряжения статора сдвинут относительно вектора на угол который равен углу только при т. е. при возбуждении ротора постоянным током. При действительные напряжения, приложенные к обмоткам фаз статора двигателя, можно записать в виде
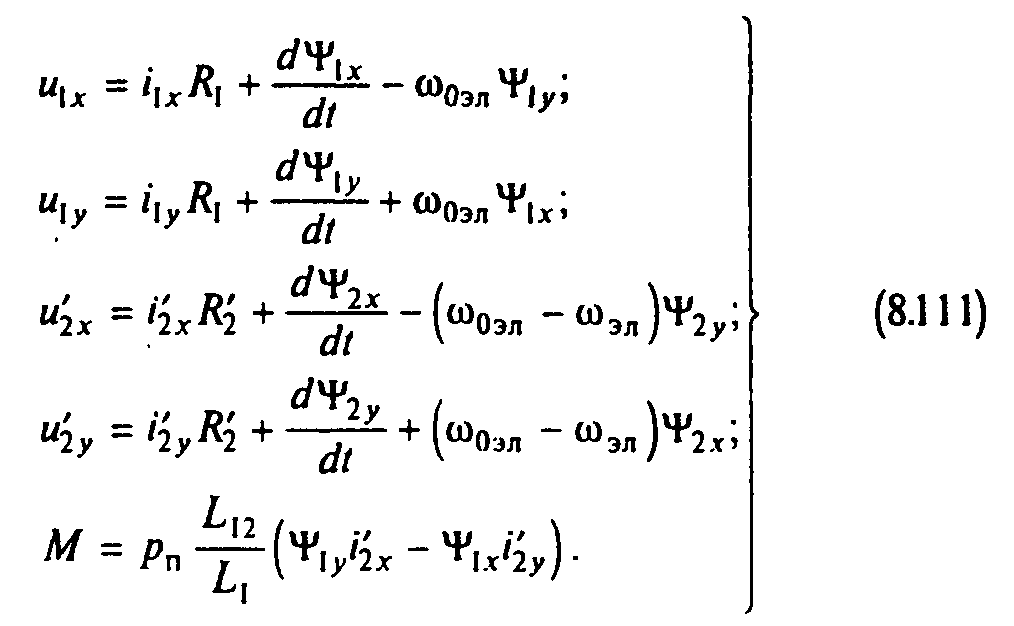
Уравнения МДП в осях х, у имеют вид
Ограничимся рассмотрением установившегося режима работы, положив , и пренебрежем активным сопротивлением об мотки статора Для использования (8.111) с помощью формул (2.15) и (2.16) преобразуем (8.109) и (8.110) к осям х, у
В результате преобразования получим
где штрихами отмечены приведенные к цепи статора значения напряжений.
Подставив все принятые и полученные значения в (8.111) и выполнив некоторые преобразования, представим его в виде
С помощью выражений для потокосцеплений (2.20) можно получить
Значения определяются с помощью первых двух уравнений (8.112):
Т.к.
то (8.113) при подстановке можно представить в виде
уравнения (8.114) позволяют получить выражение механической характеристики двигателя в режиме МДП. Для этого необходимо разрешить первые два уравнения относительно , подставить полученные выражения в третье уравнение, преобразовать переменные двухфазной модели к трехфазной с помощью (2.37), перейти от максимальных значений напряжений к действующим и выполнить необходимые математические преобразования. В результате этого получим
где — угол сдвига между осями полей статора и ротора.
Анализ уравнения механической характеристики асинхронного двигателя в режиме работы МДП позволяет установить ряд интересных и практически важных особенностей рассматриваемой каскадной схемы. Момент двигателя в этом режиме содержит две составляющие, одна из которых соответствует естественной механической характеристике асинхронного двигателя, а другая — синхронному режиму, обусловленному напряжением , подведенным к цепи ротора.
Действительно, при (8.115) принимает вид
совпадающий с уравнением (8.76) при При неизменном задании частоты напряжения в цепи ротора . Поэтому скольжение двигателя при работе в синхронном режиме остается и асинхронная составляющая момента . Зависимость Мс от скорости представлена на рис. 8.38,6 (кривая ).
вторая составляющая обусловлена взаимодействием возбуждаемого напряжением ротора с полем статора, создаваемым напряжением сети
На рис. 8.38,6 представлены кривые (кривая 2) и при (кривая 3).
Результирующий момент двигателя
Если чередование фаз напряжений одинаково, поля статора и ротора имеют одинаковое направление вращения и значения скольжения s0 и частоты ротора положительны. Двигатель при тормозной нагрузке работает в двигательном режиме, причем угол принимает такое значение, при котором . Это область режима работы каскада со скоростью, меньшей синхронной . Если изменить нагрузку, приложив к валу двигателя движущий момент — Мс, возникнет переходный процесс, в котором под действием положительного динамического момента ротор двигателя ускорится, изменит положение относительно оси поля статора и угол по окончании переходного процесса примет отрицательное значение, соответствующее по (8.118) условию .
Таким образом, при двигатель работает со скоростью, меньшей синхронной, причем в зависимости от нагрузки на валу он может работать как в двигательном, так и в генераторном режиме. При этом переход в генераторный режим обеспечивается изменением синхронной составляющей (8.118) под действием изменений внутреннего угла обусловленных изменениями нагрузки, а составляющая остается неизменной. Механические характеристики, соответствующие двум значениям представлены на рис. 8.38,5 (прямые 4, 5).
При работе в двигательном режиме с (при подсинхронной скорости) потребляемая двигателем мощность если пренебречь потерями, поступает на вал двигателя (Р2) и в виде мощности скольжения Ps в преобразователь частоты:
Мощность скольжения Ps преобразуется преобразователем частоты и возвращается в сеть (рис. 8.39,о). Если при машина работает в генераторном режиме то направление потоков мощностей изменяется на противоположное (рис. 8.39,6):
Уменьшение частоты ротора влечет за собой увеличение скорости двигателя, так как
Следовательно, на рис. 8.38,б уменьшение вызывает переход с характеристики 5 на характеристику 4 и затем при на характеристику 6.
При роторная цепь питается постоянным напряжением и двигатель работает в чисто синхронном режиме,.. Действительно, при этом s0= 0, асинхронная составляющая и момент двигателя полностью определяется (8. 117):
Сравнивая это выражение с (8.118) при , можно убедиться в их полном совпадении. Следовательно, характеристика 6 на рис. 8.38,б представляет собой механическую характеристику неявнополюсной синхронной машины, которой становится асинхронный двигатель при питании его роторной обмотки постоянным током.
Изменив знак можно изменить чередование фаз роторного напряжения . При этом поле ротора вращается в направлении, противоположном полю статора, , скорость двигателя , а скольжение отрицательно. Механические характеристики, соответствующие двум значениям представлены на рис. 8.38,6 (прямые 7 и 8).
Рассматривая этот рисунок, можно видеть, что и здесь в зависимости от нагрузки на валу можно иметь как двигательный, так и генераторный режим работы двигателя. При этом асинхронная составляющая момента при данном значении s0< 0 отрицательна и неизменна, а значения момента, соответствующие обеспечиваются изменениями угла за счет поворота ротора относительно поля статора под действием возникающих динамических моментов.
При сверхсинхронной скорости (s0 < 0) при работе в двигательном режиме механическая мощность Р2 обеспечивается потреблением мощности как по цепи статора Р1, так и по цепи ротора (мощность скольжения Ps) :
При переходе в генераторный режим и том же s0 поступающая С вала мощность Р2 передается в сеть по обоим каналам, т. е. направления потоков изменяются на противоположные, как показано на рис. 8.39,в и г.
Механические характеристики на рис. 8.38,6 соответствуют , при этом максимум синхронной составляющей момента (8.117) изменяется в функции скольжения s0 (см. Кривые 2 и 3). Поскольку составляющая при изменении знака s0 изменяет знак, перегрузочная способность двигателя в режиме МДП при оказывается существенно различной. При скоростях ниже синхронной двигательные моменты существенно снижают перегрузочную способность в генераторном режиме: максимальные значения тормозного момента М при данном в этом режиме ограничиваются кривой 9. При скоростях, больших синхронной тормозные моменты ограничивают максимальные значения результирующего момента, соответствующие в двигательном режиме (кривая 10 на рис. 8.38,б).
Практически требуемую перегрузочную способность во всем диапазоне регулирования скорости можно поддерживать изменяя напряжение в функции s0 и нагрузки. При этом должно обеспечиваться ограничение токов ротора и статора на допустимом уровне во всех режимах.
Изменения напряжения обеспечиваются соответствующими изменениями сигнала задания напряжения преобразователя частоты. При данной нагрузке, например при путем изменения можно воздействовать на потребление реактивной мощности в цепи статора для синхронного двигателя.
Проведенный анализ показывает, что в режиме МДП свойства каскада близки свойствам синхронного двигателя, причем при они совпадают. Специфика проявляется только в наличии сильной асинхронной составляющей момента Mc(s0), в возможности работы при различных скоростях, задаваемых воздействием на напряжение , и в возбуждении ротора переменным током угловой частоты скольжения
Известно, что синхронный двигатель склонен к качаниям, обусловленным упругой электромагнитной связью между полями статора и ротора и для борьбы с ними снабжается демпферной обмоткой, создающей асинхронную составляющую момента. В рассматриваемой каскадной схеме имеет место более сильная асинхронная составляющая, определяемая естественной механической характеристикой асинхронного двигателя (без учета внутренних сопротивлений преобразователя частоты). Поэтому при работе в области скоростей, близких к скорости поля to0, где — жесткость характеристик высока, отрицательна и оказывает на колебания ротора сильное демпфирующее действие, аналогичное вязкому трению.
Однако при жесткость этой характеристики меняет знак т. е. механическая характеристика имеет положительный наклон и может оказывать не демпфирующее, а раскачивающее действие, приводящее к неустойчивой работе каскада. Это обстоятельство ограничивает область применения синхронного режима работы каскада установками, в которых требуется небольшой диапазон изменений скорости [регулирование в пределах ±(20—30)% . При этом | и динамические свойства каскада могут в достаточной мере соответствовать требованиям.
Следует заметить, что для указанного диапазона двухзонное регулирование скорости в каскадной схеме имеет преимущества перед другими способами, так как обеспечивает экономичное регулирование скорости при относительно небольшой требуемой мощности преобразователя частоты, который должен быть рассчитан на максимум мощности скольжения
Соответственно при регулировании скорости в пределах ±(20-30)% требуемая мощность преобразователя частоты составляет 20—30% номинальной мощности двигателя.
При необходимости изменения скорости в более широких пределах путем введения обратных связей обеспечивают зависимость частоты от скорости двигателя, аналогичную зависимости частоты при асинхронном режиме работы. В этом случае механические характеристики каскада имеют конечную жесткость, определяемую настройкой обратных связей, а режим работы каскада называется асинхронным.
Возможности двухзонного регулирования скорости с работой как в двигательном, так и в генераторном режимах при каждой скорости в каскадных схемах обеспечиваются только при применении полностью управляемых преобразователей частоты, обладающих способностью пропускать энергию как в прямом, так и в обратном направлениях (см. рис. 8.39). При указанном ограниченном диапазоне двухзонного регулирования скорости требуются изменения частоты напряжения = Этим условиям наиболее полно соответствуют преобразователи частоты с непосредственной связью; применение их экономически особенно выгодно в электроприводах, мощность которых составляет сотни и тысячи киловатт.
Недостатком таких каскадов является необходимость реостатного пуска двигателя до низшей скорости в диапазоне регулирования. Этот недостаток не имеет существенного значения для механизмов, работающих продолжительно, без частых пусков.
Экономичность мощных каскадных электроприводов с работой асинхронного двигателя в режиме МДП определяется при указанных условиях высоким КПД тиристорного преобразователя, возможностью снижения общего потребления реактивной мощности путем рационального управления напряжением а также относительно небольшими габаритами, массой и стоимостью преобразователя. Последние два достоинства проявляются в тем большей мере, чем в более узких пределах требуется регулировать скорость электропривода.
Однако в большинстве случаев мощность электроприводов, требующих регулирования скорости, составляет десятки и сотни киловатт, а требуемый диапазон регулирования скорости D превышает диапазон, рациональный для каскада с МДП. Если , мощность преобразователя частоты становится соизмеримой с мощностью двигателя. При этом более целесообразно использовать частотное регулирование скорости, позволяющее реализовать непрерывное управление скоростью во всех переходных процессах асинхронного электропривода аналогично системам Г—Д и ТП—Д.
Тем не менее в силу рассмотренных особенностей каскадных
схем существует достаточно широкая область их применения в тех случаях, когда условия работы механизмов позволяют снизить требования к управлению потоком мощности скольжения на пути ее возвращения в сеть или передачи на вал двигателя. К числу таких механизмов относятся нереверсивные механизмы, работающие с реактивной нагрузкой на валу и не требующие работы двигателя в генераторном режиме в процессах торможения.
При указанных условиях можно ограничиться однозонным регулированием скорости, при котором в двигательном режиме направление потока мощности скольжения неизменно — от ротора двигателя в сеть (рис. 8.39) или на вал. Это позволяет существенно упростить каскадные схемы, применив в канале преобразования мощности скольжения неуправляемый выпрямитель.
В электрических каскадах выпрямленный выпрямителем ток ротора преобразуется в переменный ток и передается в сеть. Если для преобразования тока и рекуперации энергии скольжения используется электромашинный агрегат, каскад называется машинно-вентильным. При применении для этой цели вентильного инвертора, ведомого сетью, каскад называется вентильным (асинхронно-вентильным) каскадом.
Электромеханические каскады являются машинно-вентильными. В них выпрямленный ток направляется в обмотку якоря машины постоянного тока, соединенной с валом асинхронного двигателя, которая преобразует электрическую энергию скольжения в механическую, поступающую на вал двигателя.
4. Работа эл. двигателей на общий механический вал.
4.1 Распределение нагрузки между двигателями работающими на общий механический вал в зависимости от жёсткости механических характеристик и скоростей идеального холостого хода.
на рис. 2.16 рассматривается совместная работа асинхронного двигателя с нагрузкой на валу. Нагрузочный механизм (рис. 2.16.а) соединяется с валом двигателя и при вращении создает момент сопротивления (момент нагрузки). При изменении нагрузки на валу автоматически изменяется частота вращения ротора, токи в обмотках ротора и статора и потребляемый из сети ток. Пусть двигатель работал с нагрузкой Mнагр1 в точке 1 (рис. 2.16.б). Если нагрузка на валу увеличится до значения Mнагр2, рабочая точка переместится в точку 2. При этом частота вращения ротора снизится (n2<n1), а возрастет вращающий момент (M2>M1). Снижение частоты вращения ротора приводит к увеличению скольжения, увеличению токов в обмотках ротора и статора, т.е. к увеличению потребляемого из сети тока.
Рис. 2.16
Схема включения двигателя постоянного тока с независимым возбуждением (рис. 4.1), когда для питания цепи возбуждения используется отдельный источник постоянного тока, находит применение в регулируемых электроприводах
Якорь двигателя М и его обмотка возбуждения LМ обычно получают питание от разных, независимых друг от друга источников напряжения U и UВ, что позволяет отдельно регулировать напряжение на якоре двигателя и на обмотке возбуждения. Направление тока I и эдс вращения двигателя Е, показанные на рис. 4.1, соответствуют двигательному режиму работы, когда электрическая энергия потребляется двигателем из сети: Рэ = Uc I и преобразуется в механическую, мощность которой Рм = М ω. Зависимость между моментом М и частотой вращения ω двигателя определяется его механической характеристикой.
Рис. 4.1. Схема включения двигателя постоянного тока независимого возбуждения: а – цепи якорной обмотки; б – цепи возбуждения
При установившемся режиме работы двигателя приложенное напряжение U уравновешивается падением напряжения в якорной цепи I∙R и наведенной в якоре эдс вращения Е, т.е.
, (4.1)
где I – ток в якорной цепи двигателя; R = Rя+ Rр1 – суммарное сопротивление якорной цепи, Ом, включающее внешнее сопротивление резистора Rp1 и внутреннее сопротивление якоря двигателя Rя (при наличии дополнительных полюсов учитывается и их сопротивление):
, (4.2)
где k – конструктивный коэффициент двигателя; k = pN/2a (р – число пар полюсов двигателя; N – число активных проводников обмотки якоря; 2а – число пар параллельных ветвей обмотки якоря; Ф – магнитный поток двигателя.
Подставив в уравнение баланса напряжений якорной цепи выражение для Е и выразив ω, получим:
. (4.3)
Это уравнение называется электромеханической характеристикой двигателя.
Для получения механической характеристики необходимо найти зависимость скорости от момента двигателя. Запишем формулу связи момента с током якоря двигателя и магнитным потоком:
. (4.4)
Выразим ток якоря двигателя через момент и подставим в формулу электромеханической характеристики:
, (4.5а)
или
, (4.5б)
где ω0 = U / kФ – частота вращения машины в режиме идеального холостого хода; β = (kФ)2 / R – жёсткость механический характеристики машины[2].
Механическая характеристика двигателя при неизменных параметрах U, R и Ф представляется прямой линией 1 (рис. 4.2).
На холостом ходу (М = 0) двигатель вращается с частотой вращения w0. По мере увеличения момента нагрузки частота вращения снижается, номинальному моменту нагрузки МН соответствует номинальная частота вращения w0. Изменение величины питающего напряжения вызывает пропорциональное уменьшение частот вращения во всех режимах работы. При этом жесткость механической характеристики b сохраняется, так как его величина, согласно (4.5б), определяется сопротивлением якорной цепи, конструктивным коэффициентом и магнитным потоком машины.
Согласно (4.5), путем изменения величины питающего напряжения U от нуля до номинального значения (например, при помощи управляемого тиристорного выпрямителя), можно изменять частоту вращения вала в широких пределах, что подтверждается рис. 4.2 (характеристиками 2). При этом диапазон плавного и экономичного регулирования частоты вращения – глубина регулирования – находится по формуле
, (4.6)
где wmax, wmin – максимально и минимально возможные частоты вращения при данном способе регулирования.
Практически значение глубины регулирования достигает 10…100 тыс. Столь большой диапазон регулирования позволяет исключить или значительно упростить механическую трансмиссию.
Вторым способом регулирования частоты вращения двигателя является изменение сопротивления якорных цепей – путём включения последовательно в цепь якоря регулировочного резистора RР1 (рис. 4.1). В этом случае, согласно (4.5), при увеличении сопротивления жесткость характеристики машины уменьшается (рис. 4.2, линии 3). Как видно из рис. 4.2, частота вращения машины при идеальном холостом ходе: М = 0 не изменяется, а с ростом момента нагрузки частота вращения снижается значительно (β уменьшается). Данный способ регулирования позволяет изменять частоту вращения в значительном диапазоне, однако вследствие значительных потерь мощности в регулировочном резисторе резко снижается кпд привода:
. (4.7)
Регулирование частоты вращения машины постоянного тока магнитным потоком машины Ф – за счёт изменения тока возбуждения резистором RР2 (см. рис. 4.1) – является экономичным способом, так как потери в резисторе RР2 не велики вследствие малого тока возбуждения. Однако этот способ позволяет лишь увеличивать частоту вращения по сравнению с номинальной (глубина регулирования не превышает D = 2…3). Такой способ регулирования предусмотрен для большинства машин[3].
Ранее была рассмотрена работа двигателя независимого возбуждения в двигательном режиме, чему соответствовали механические характеристики, представленные на рис. 4.2 и расположенные в первом квадранте координатных осей. Однако этим не исчерпываются возможные режимы работы электродвигателя и его механические характеристики. Весьма часто в современных электроприводах необходимо быстро и точно остановить механизм или изменить направление его движения. Быстрота и точность, с какой будут проделаны эти операции, во многих случаях определяют производительность механизма. Во время торможения или перемены направления движения (реверса) электродвигатель работает в тормозном режиме на одной из механических характеристик, соответствующих осуществляемому способу торможения. Графическое изображение механических характеристик машины независимого возбуждения для разных режимов работы представлено на рис. 4.3.[4]
Рис. 4.3. Механические характеристики двигателя постоянного тока независимого возбуждения при различных режимах работы: 1 – механическая характеристика при номинальном напряжении на якоре; 2 – механическая характеристика при напряжении на якоре, равном нулю
Здесь, кроме участка характеристик, соответствующих двигательному режиму (квадрант I), показаны участки характеристик в квадрантах II и IV, характеризующие три возможных способа генераторного электрического торможения, а именно:
1) торможение с отдачей энергии в сеть (рекуперативное);
2) динамическое торможение;
3) торможение противовключением.
Рассмотрим подробнее особенности механических характеристик при указанных способах торможения.
1. Торможение с отдачей энергии в сеть, или рекуперативное торможение(генераторный режим работы параллельно с сетью) осуществляется в том случае, когда скорость двигателя оказывается выше скорости идеального холостого хода и его эдс Е больше приложенного напряжения U. Двигатель здесь работает в режиме генератора параллельно с сетью, которой он отдает электрическую энергию; ток при этом изменяет свое направление, следовательно, изменяет знак и момент двигателя, т. е. он становится тормозным: М = – Ia Ф. Если обозначить тормозной момент через МТ= –М, то уравнение (4.5) при ω > ω0 примет следующий вид:
. (4.8)
Как видно из выражения (4.8), жесткость (наклон) механической характеристики в рассматриваемом генераторном режиме будет такой же, как и в двигательном. Поэтому графически механические характеристики двигателя в режиме торможения с отдачей энергии в сеть являются продолжением характеристик двигательного режима в область квадранта II (рис. 4.3). Этот способ торможения возможен, например, в приводах транспортных и подъемных механизмов при спуске груза и при некоторых способах регулирования скорости, когда двигатель, переходя к низшим скоростям, проходит значения ω>ω0. Такое торможение является весьма экономичным, поскольку оно сопровождается отдачей в сеть электрической энергии.
2. Динамическое торможениепроисходит при отключении якоря двигателя от сети и замыкании его на резистор (рис. 4.4), поэтому иногда его называют реостатным торможением. Обмотка возбуждения при этом должна оставаться присоединенной к сети.
Рис. 4.4. Схема включения двигателя постоянного тока независимого возбуждения при динамическом торможении.
При динамическом торможении, так же, как и в предыдущем случае, механическая энергия, поступающая с вала, преобразуется в электрическую. Однако эта энергия не отдается в сеть, а выделяется в виде теплоты в сопротивлениях цепи якоря.
Так как при динамическом торможении якорные цепи машины отключены от сети, то в выражении (4.5) следует приравнять нулю напряжение U, тогда уравнение примет вид:
. (4.9)
При динамическом торможении механическая характеристика двигателя, как это видно из (4.9), представляет собой прямую, проходящую через начало координат. Семейство характеристик динамического торможения при различных сопротивлениях R якорной цепи показано ранее (см. рис. 4.3 квадрант II). Как видно из этого рисунка, жесткость характеристик уменьшается с увеличением сопротивления якорной цепи.
Динамическое торможение широко используется для останова привода при отключениях его от сети (особенно при реактивном характере момента), например при спуске грузов в подъемных механизмах. Оно достаточно экономично, хотя и уступает в этом отношении торможению с отдачей энергии в сеть.
3. Торможение противовключением(генераторный режим работы последовательно с сетью) осуществляется в том случае, когда обмотки двигателя включены для одного направления вращения, а якорь двигателя под воздействием внешнего момента или сил инерции вращается в противоположную сторону. Это может происходить, например, в приводе подъемника, когда двигатель включен на подъем, а момент, развиваемый грузом, заставляет привод вращаться в сторону спуска груза. Такой же режим получается и при переключении обмотки якоря (или обмотки возбуждения) двигателя для быстрой остановки или для изменения направления вращения на противоположное.
Графическое изображение механической характеристики для торможения противовключением, когда имеет место, например, так называемый тормозной спуск груза, приведено на рис. 4.3, из которого следует, что механическая характеристика при торможении противовключением является продолжением характеристики двигательного режима в квадрант IV.

 является возрастание потерь энергии в роторной цепи при снижении скорости пропорционально скольжению. Однако у двигателя с фазным ротором этот недостаток может быть устранен путем включения в цепь ротора источника регулируемой ЭДС, с помощью которого энергию скольжения можно либо возвратить и сеть, либо использовать для совершения полезной работы.
является возрастание потерь энергии в роторной цепи при снижении скорости пропорционально скольжению. Однако у двигателя с фазным ротором этот недостаток может быть устранен путем включения в цепь ротора источника регулируемой ЭДС, с помощью которого энергию скольжения можно либо возвратить и сеть, либо использовать для совершения полезной работы.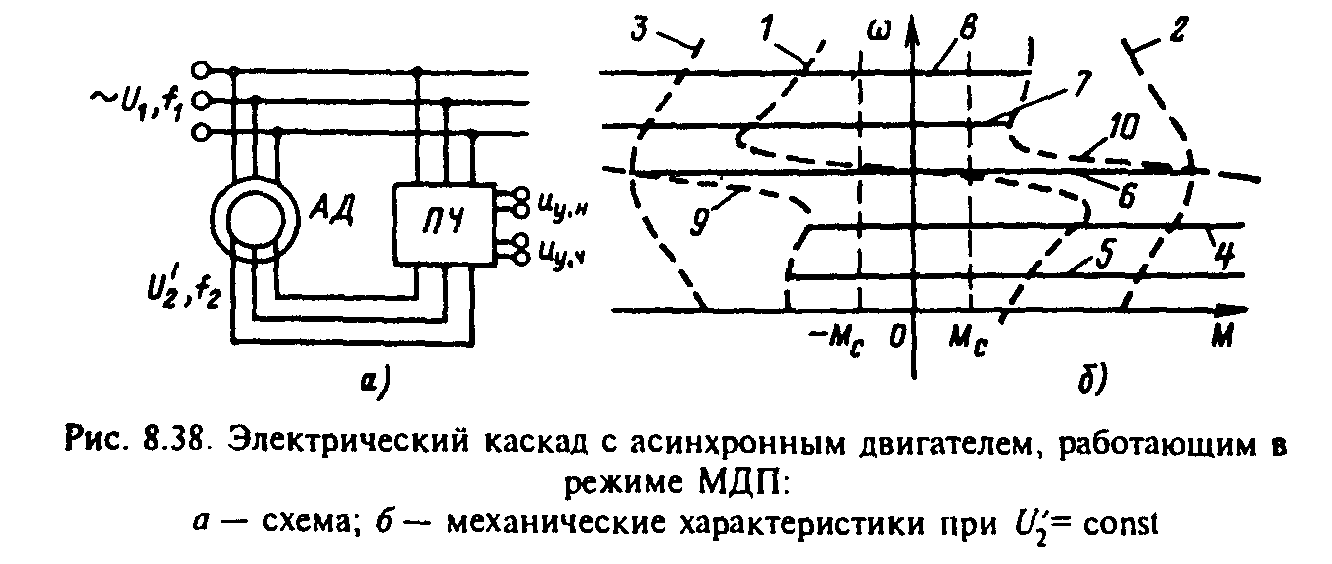
 не зависит от нагрузки двигателя, то скорость двигателя в пределах допустимой перегрузки остается неизменной:
не зависит от нагрузки двигателя, то скорость двигателя в пределах допустимой перегрузки остается неизменной:
 При записи по аналогии с синхронной машиной, ориентируем все переменные относительно вектора напряжения
При записи по аналогии с синхронной машиной, ориентируем все переменные относительно вектора напряжения  подводимого к ротору:
подводимого к ротору:
 причем ось поля ротора совпадает с направлением вектора
причем ось поля ротора совпадает с направлением вектора  В синхронном режиме МДП ток ротора имеет частоту
В синхронном режиме МДП ток ротора имеет частоту которая в общем случае не равна нулю. При этом изменения нагрузки и скольжения вызывают изменения угла сдвига поля ротора относительно напряжения
которая в общем случае не равна нулю. При этом изменения нагрузки и скольжения вызывают изменения угла сдвига поля ротора относительно напряжения  поэтому вектор напряжения статора
поэтому вектор напряжения статора  сдвинут относительно вектора
сдвинут относительно вектора  на угол
на угол  который равен углу
который равен углу  только при
только при  т. е. при возбуждении ротора постоянным током. При
т. е. при возбуждении ротора постоянным током. При  действительные напряжения, приложенные к обмоткам фаз статора двигателя, можно записать в виде
действительные напряжения, приложенные к обмоткам фаз статора двигателя, можно записать в виде
 , и пренебрежем активным сопротивлением об мотки статора
, и пренебрежем активным сопротивлением об мотки статора  Для использования (8.111) с помощью формул (2.15) и (2.16) преобразуем (8.109) и (8.110) к осям х, у
Для использования (8.111) с помощью формул (2.15) и (2.16) преобразуем (8.109) и (8.110) к осям х, у 
 определяются с помощью первых двух уравнений (8.112):
определяются с помощью первых двух уравнений (8.112):

 можно представить в виде
можно представить в виде
 , подставить полученные выражения в третье уравнение, преобразовать переменные двухфазной модели
, подставить полученные выражения в третье уравнение, преобразовать переменные двухфазной модели  к трехфазной с помощью (2.37), перейти от максимальных значений напряжений к действующим и выполнить необходимые математические преобразования. В результате этого получим
к трехфазной с помощью (2.37), перейти от максимальных значений напряжений к действующим и выполнить необходимые математические преобразования. В результате этого получим
 — угол сдвига между осями полей статора и ротора.
— угол сдвига между осями полей статора и ротора. , подведенным к цепи ротора.
, подведенным к цепи ротора. (8.115) принимает вид
(8.115) принимает вид
 При неизменном задании частоты напряжения
При неизменном задании частоты напряжения  в цепи ротора
в цепи ротора  . Поэтому скольжение двигателя при работе в синхронном режиме остается
. Поэтому скольжение двигателя при работе в синхронном режиме остается  и асинхронная составляющая момента
и асинхронная составляющая момента  . Зависимость Мс от скорости представлена на рис. 8.38,6 (кривая
. Зависимость Мс от скорости представлена на рис. 8.38,6 (кривая  ).
). ротора с полем статора, создаваемым напряжением сети
ротора с полем статора, создаваемым напряжением сети 

 (кривая 2) и при
(кривая 2) и при  (кривая 3).
(кривая 3).
 одинаково, поля статора и ротора имеют одинаковое направление вращения и значения скольжения s0 и частоты ротора
одинаково, поля статора и ротора имеют одинаковое направление вращения и значения скольжения s0 и частоты ротора  положительны. Двигатель при тормозной нагрузке работает в двигательном режиме, причем угол
положительны. Двигатель при тормозной нагрузке работает в двигательном режиме, причем угол  принимает такое значение, при котором
принимает такое значение, при котором  . Это область режима работы каскада со скоростью, меньшей синхронной
. Это область режима работы каскада со скоростью, меньшей синхронной  . Если изменить нагрузку, приложив к валу двигателя движущий момент — Мс, возникнет переходный процесс, в котором под действием положительного динамического момента ротор двигателя ускорится, изменит положение относительно оси поля статора и угол
. Если изменить нагрузку, приложив к валу двигателя движущий момент — Мс, возникнет переходный процесс, в котором под действием положительного динамического момента ротор двигателя ускорится, изменит положение относительно оси поля статора и угол  по окончании переходного процесса примет отрицательное значение, соответствующее по (8.118) условию
по окончании переходного процесса примет отрицательное значение, соответствующее по (8.118) условию  .
. двигатель работает со скоростью, меньшей синхронной, причем в зависимости от нагрузки на валу он может работать как в двигательном, так и в генераторном режиме. При этом переход в генераторный режим обеспечивается изменением синхронной составляющей (8.118) под действием изменений внутреннего угла
двигатель работает со скоростью, меньшей синхронной, причем в зависимости от нагрузки на валу он может работать как в двигательном, так и в генераторном режиме. При этом переход в генераторный режим обеспечивается изменением синхронной составляющей (8.118) под действием изменений внутреннего угла  обусловленных изменениями нагрузки, а составляющая
обусловленных изменениями нагрузки, а составляющая  остается неизменной. Механические характеристики, соответствующие двум значениям
остается неизменной. Механические характеристики, соответствующие двум значениям  представлены на рис. 8.38,5 (прямые 4, 5).
представлены на рис. 8.38,5 (прямые 4, 5). (при подсинхронной скорости) потребляемая двигателем мощность
(при подсинхронной скорости) потребляемая двигателем мощность  если пренебречь потерями, поступает на вал двигателя (Р2) и в виде мощности скольжения Ps в преобразователь частоты:
если пренебречь потерями, поступает на вал двигателя (Р2) и в виде мощности скольжения Ps в преобразователь частоты:
 машина работает в генераторном режиме
машина работает в генераторном режиме  то направление потоков мощностей изменяется на противоположное (рис. 8.39,6):
то направление потоков мощностей изменяется на противоположное (рис. 8.39,6):
 влечет за собой увеличение скорости двигателя, так как
влечет за собой увеличение скорости двигателя, так как
 вызывает переход с характеристики 5 на характеристику 4 и затем при
вызывает переход с характеристики 5 на характеристику 4 и затем при  на характеристику 6.
на характеристику 6. и момент двигателя полностью определяется (8. 117):
и момент двигателя полностью определяется (8. 117):

 , можно убедиться в их полном совпадении. Следовательно, характеристика 6 на рис. 8.38,б представляет собой механическую характеристику неявнополюсной синхронной машины, которой становится асинхронный двигатель при питании его роторной обмотки постоянным током.
, можно убедиться в их полном совпадении. Следовательно, характеристика 6 на рис. 8.38,б представляет собой механическую характеристику неявнополюсной синхронной машины, которой становится асинхронный двигатель при питании его роторной обмотки постоянным током.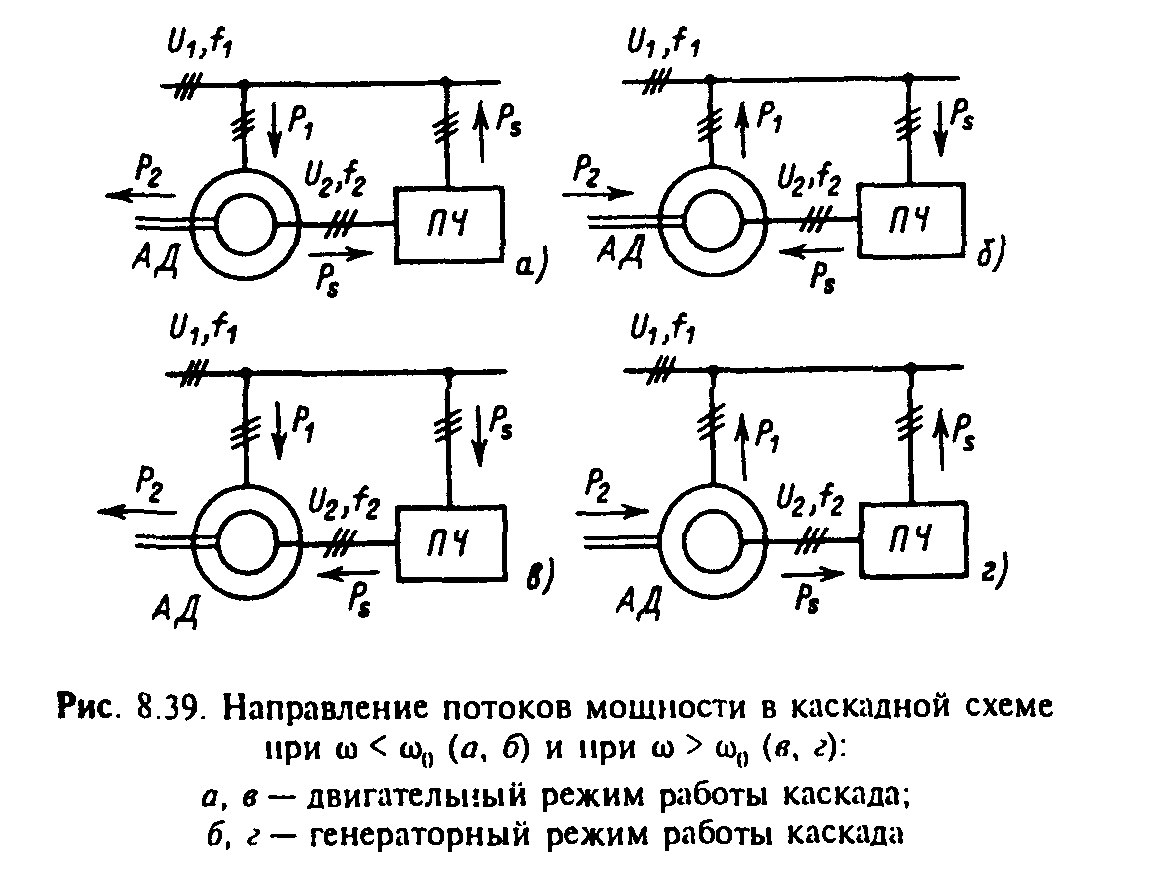
 можно изменить чередование фаз роторного напряжения
можно изменить чередование фаз роторного напряжения  . При этом поле ротора вращается в направлении, противоположном полю статора,
. При этом поле ротора вращается в направлении, противоположном полю статора,  , скорость двигателя
, скорость двигателя  , а скольжение отрицательно. Механические характеристики, соответствующие двум значениям
, а скольжение отрицательно. Механические характеристики, соответствующие двум значениям  представлены на рис. 8.38,6 (прямые 7 и 8).
представлены на рис. 8.38,6 (прямые 7 и 8). обеспечиваются изменениями угла
обеспечиваются изменениями угла  за счет поворота ротора относительно поля статора под действием возникающих динамических моментов.
за счет поворота ротора относительно поля статора под действием возникающих динамических моментов.
 , при этом максимум синхронной составляющей момента (8.117)
, при этом максимум синхронной составляющей момента (8.117)  изменяется в функции скольжения s0 (см. Кривые 2 и 3). Поскольку составляющая
изменяется в функции скольжения s0 (см. Кривые 2 и 3). Поскольку составляющая  при изменении знака s0 изменяет знак, перегрузочная способность двигателя в режиме МДП при
при изменении знака s0 изменяет знак, перегрузочная способность двигателя в режиме МДП при  оказывается существенно различной. При скоростях ниже синхронной
оказывается существенно различной. При скоростях ниже синхронной  двигательные моменты
двигательные моменты  существенно снижают перегрузочную способность в генераторном режиме: максимальные значения тормозного момента М при данном
существенно снижают перегрузочную способность в генераторном режиме: максимальные значения тормозного момента М при данном  в этом режиме ограничиваются кривой 9. При скоростях, больших синхронной
в этом режиме ограничиваются кривой 9. При скоростях, больших синхронной  тормозные моменты ограничивают максимальные значения результирующего момента, соответствующие
тормозные моменты ограничивают максимальные значения результирующего момента, соответствующие  в двигательном режиме (кривая 10 на рис. 8.38,б).
в двигательном режиме (кривая 10 на рис. 8.38,б). в функции s0 и нагрузки. При этом должно обеспечиваться ограничение токов ротора и статора на допустимом уровне во всех режимах.
в функции s0 и нагрузки. При этом должно обеспечиваться ограничение токов ротора и статора на допустимом уровне во всех режимах. преобразователя частоты. При данной нагрузке, например при
преобразователя частоты. При данной нагрузке, например при  путем изменения
путем изменения  можно воздействовать на потребление реактивной мощности в цепи статора для синхронного двигателя.
можно воздействовать на потребление реактивной мощности в цепи статора для синхронного двигателя. они совпадают. Специфика проявляется только в наличии сильной асинхронной составляющей момента Mc(s0), в возможности работы при различных скоростях, задаваемых воздействием на напряжение
они совпадают. Специфика проявляется только в наличии сильной асинхронной составляющей момента Mc(s0), в возможности работы при различных скоростях, задаваемых воздействием на напряжение  , и в возбуждении ротора переменным током угловой частоты скольжения
, и в возбуждении ротора переменным током угловой частоты скольжения 
 и для борьбы с ними снабжается демпферной обмоткой, создающей асинхронную составляющую момента. В рассматриваемой каскадной схеме имеет место более сильная асинхронная составляющая, определяемая естественной механической характеристикой асинхронного двигателя (без учета внутренних сопротивлений преобразователя частоты). Поэтому при работе в области скоростей, близких к скорости поля to0, где —
и для борьбы с ними снабжается демпферной обмоткой, создающей асинхронную составляющую момента. В рассматриваемой каскадной схеме имеет место более сильная асинхронная составляющая, определяемая естественной механической характеристикой асинхронного двигателя (без учета внутренних сопротивлений преобразователя частоты). Поэтому при работе в области скоростей, близких к скорости поля to0, где —  жесткость характеристик
жесткость характеристик  высока, отрицательна и оказывает на колебания ротора сильное демпфирующее действие, аналогичное вязкому трению.
высока, отрицательна и оказывает на колебания ротора сильное демпфирующее действие, аналогичное вязкому трению. жесткость этой характеристики меняет знак
жесткость этой характеристики меняет знак  т. е. механическая характеристика имеет положительный наклон и может оказывать не демпфирующее, а раскачивающее действие, приводящее к неустойчивой работе каскада. Это обстоятельство ограничивает область применения синхронного режима работы каскада установками, в которых требуется небольшой диапазон изменений скорости [регулирование в пределах ±(20—30)%
т. е. механическая характеристика имеет положительный наклон и может оказывать не демпфирующее, а раскачивающее действие, приводящее к неустойчивой работе каскада. Это обстоятельство ограничивает область применения синхронного режима работы каскада установками, в которых требуется небольшой диапазон изменений скорости [регулирование в пределах ±(20—30)%  . При этом
. При этом  | и динамические свойства каскада могут в достаточной мере соответствовать требованиям.
| и динамические свойства каскада могут в достаточной мере соответствовать требованиям.
 требуемая мощность преобразователя частоты составляет 20—30% номинальной мощности двигателя.
требуемая мощность преобразователя частоты составляет 20—30% номинальной мощности двигателя. от скорости двигателя, аналогичную зависимости частоты при асинхронном режиме работы. В этом случае механические характеристики каскада имеют конечную жесткость, определяемую настройкой обратных связей, а режим работы каскада называется асинхронным.
от скорости двигателя, аналогичную зависимости частоты при асинхронном режиме работы. В этом случае механические характеристики каскада имеют конечную жесткость, определяемую настройкой обратных связей, а режим работы каскада называется асинхронным. =
=  Этим условиям наиболее полно соответствуют преобразователи частоты с непосредственной связью; применение их экономически особенно выгодно в электроприводах, мощность которых составляет сотни и тысячи киловатт.
Этим условиям наиболее полно соответствуют преобразователи частоты с непосредственной связью; применение их экономически особенно выгодно в электроприводах, мощность которых составляет сотни и тысячи киловатт. а также относительно небольшими габаритами, массой и стоимостью преобразователя. Последние два достоинства проявляются в тем большей мере, чем в более узких пределах требуется регулировать скорость электропривода.
а также относительно небольшими габаритами, массой и стоимостью преобразователя. Последние два достоинства проявляются в тем большей мере, чем в более узких пределах требуется регулировать скорость электропривода. , мощность преобразователя частоты становится соизмеримой с мощностью двигателя. При этом более целесообразно использовать частотное регулирование скорости, позволяющее реализовать непрерывное управление скоростью во всех переходных процессах асинхронного электропривода аналогично системам Г—Д и ТП—Д.
, мощность преобразователя частоты становится соизмеримой с мощностью двигателя. При этом более целесообразно использовать частотное регулирование скорости, позволяющее реализовать непрерывное управление скоростью во всех переходных процессах асинхронного электропривода аналогично системам Г—Д и ТП—Д.
 , (4.1)
, (4.1) , (4.2)
, (4.2) . (4.3)
. (4.3) . (4.4)
. (4.4) , (4.5а)
, (4.5а) , (4.5б)
, (4.5б)
 , (4.6)
, (4.6)
 . (4.7)
. (4.7)
 . (4.8)
. (4.8)
 . (4.9)
. (4.9)