Общий анализ свойств регулируемого электропривода, замкнутого отрицательной обратной связью по электромагнитному моменту, целесообразно провести с помощью обобщенной структурной схемы на рис. 6.15,б, дополнив ее цепью указанной обратной связи. При этих условиях структурная схема имеет вид, показанный на рис. 7.9, и позволяет записать следующую систему уравнений механической характеристики электропривода:
Путем преобразования системы (7.22) получим уравнение механической характеристики электропривода в виде зависимости момента от скорости:
Уравнение статической механической характеристики получим из (7.23) при р = 0:
где момент короткого замыкания; — модуль статической жесткости; — скорость идеального холостого хода в замкнутой системе регулирования.
Примем, что необходимо получить при = 0 заданное значение момента стопорения электропривода . Это значение может быть получено при различных коэффициентах обратной связи по моменту путем выбора соответствующих значений с помощью соотношения
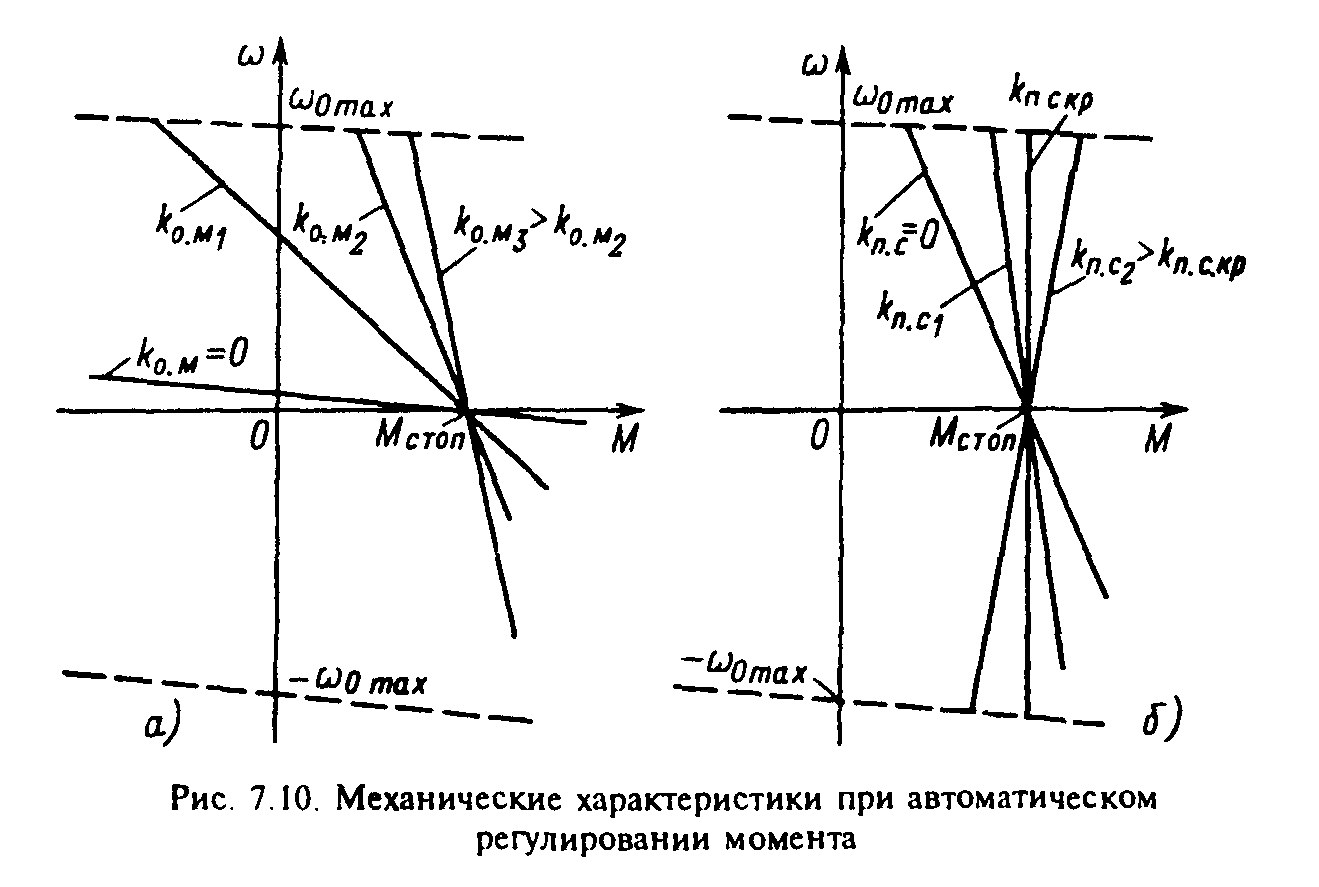
Семейство механических характеристик электропривода, соответствующее при , приведено на рис. 7.10,а. Рассматривая его, можно установить, что статическая точность регулирования момента в данной схеме при прочих равных условиях ограничена сильным возмущающим воздействием, оказываемым электромеханической связью. Вследствие действия этой связи изменения скорости двигателя в замкнутой системе регулирования оказывают на момент тем более значительное влияние, чем меньше коэффициент обратной связи по моменту. При возрастании жесткость статической характеристики уменьшается и при неограниченном возрастании или стремится к нулю. Однако при реальных значениях этих величин исключить существенное влияние изменений скорости на точность регулирования момента без принятия специальных мер практически невозможно.
При отсутствии обратной связи по моменту для получения момента необходимо небольшое значение задающего сигнала . Увеличение приводит к соответствующему возрастанию и задаваемой преобразователем скорости идеального холостого хода Поэтому при больших коэффициентах обратной связи на форме характеристик двигателя сказывается ограничение выходной переменной преобразователя, обусловленное в системе Г—Д насыщением магнитной цепи генератора и ограниченностью максимального напряжения возбуждения, в системе ТП—Д — необходимым ограничением предельных углов регулирования реверсивного преобразователя в выпрямительном и инверторном режимах и напряжением сети, а в системе ПЧ—АД — ограничением максимальной частоты. Если представить характеристику преобразователя линейной зависимостью с идеальным ограничением максимального значения величиной то легко установить, что пределы изменения скорости, в которых с помощью отрицательной связи по моменту обеспечивается с той или иной точностью регулирование момента, ограничены сверху и снизу характеристиками разомкнутой системы, соответствующими (рис. 7.10,а).
В электроприводах постоянного тока вместо обратной связи по моменту обычно используется обратная связь по току якоря, действие которой при Ф = Фном= const вполне аналогично рассмотренному. При этом в полученных соотношениях коэффициент может быть выражен через коэффициент отрицательной связи по току якоря:
При конечных значениях коэффициентов усиления и обратной связи эффективным средством уменьшения зависимости момента от скорости является использование формирующей положительной обратной связи по скорости двигателя, т. е. компенсационного принципа, в дополнение к основной системе регулирования по отклонению. Цепь формирующей положительной связи по скорости показана на рис. 7.9 штриховой линией. Уравнение статической характеристики электропривода при введении этой связи можно получить из соотношений
где — коэффициент положительной связи по скорости.
Откуда
Модуль статической жесткости механической характеристики в замкнутой системе зависит от коэффициента формирующей обратной связи по скорости:
При увеличении модуль статической жесткости быстро убывает и при критической положительной связи по скорости становится равным нулю. Дальнейшее увеличение knc приводит к изменению знака жесткости, как это показано на рис. 7.10,6. При критической положительной связи статическая ошибка, обусловленная изменениями скорости, исключается, и система обеспечивает астатическое регулирование момента без введения в цепь регулирования регуляторов с интегральной характеристикой.
Сочетание компенсационного принципа с регулированием по отклонению дает комбинированную систему управления, обеспечивающую высокую статическую точность регулирования наиболее простым путем. С помощью уравнения (7.23) при = 0 получим уравнение динамической жесткости механической характеристики в замкнутой системе:
При безынерционном преобразователе Тп= 0 выражение (7.28) принимает вид
Уравнение (7.29) по форме совпадает с выражением динамической жесткости в разомкнутой системе УП—Д, а анализ его параметров показывает, что при отрицательная обратная связь по моменту влияет на характеристики электропривода так же, как введение резистора в цепь якоря двигателя постоянного тока. Модуль жесткости при этом уменьшается и одновременно уменьшается эквивалентная постоянная времени
На рис. 7.11,а приведены ЛАЧХ и ЛФЧХ динамической жесткости, построенные по (7.29), которые подтверждают сказанное. Динамическая жесткость в замкнутой системе при (кривые ) снижается во всем диапазоне частот относительно жесткости в разомкнутой системе (кривые 2 и 2'), при этом точность регулирования момента в широком диапазоне частот остается высокой и ошибки регулирования с ростом частоты снижаются.
В случае когда , выражение (7.28) можно представить:
где — эквивалентная постоянная времени преобразователя в замкнутой системе, если приближенно принять Соответствующие (7.30) ЛАЧХ и ЛФЧХ динамической жесткости замкнутой системы представлены на рис. 7.11,6. Они свидетельствуют о том, что при большой Тп высокая точность регулирования момента имеет место лишь при низких частотах, а в области средних и высоких частот динамические свойства замкнутой системы электропривода аналогичны динамическим свойствам разомкнутой системы. Таким же путем можно убедиться, что введение формирующей положительной связи по скорости влияет на вид ЛАЧХ и ЛФЧХ только в области низких частот, т. е. сказывается в основном на статической точности регулирования момента.
Для анализа влияния обратной связи по моменту (току) на колебательность электропривода при жестких механических связях структурную схему рис. 7.9 с помощью (6.28) полезно представить в виде, показанном на рис. 7.12. Колебательность электропривода при оценим с помощью характеристического уравнения замкнутой системы, которое можно получить из передаточной функции замкнутого контура на рис. 7.12 при Мс= 0 в виде
Нетрудно видеть, что при Тп= 0 регулируемый по моменту электропривод представляет собой колебательное звено
Введение отрицательной связи по моменту увеличивает и уменьшает при этом соотношение постоянных m изменяется в сторону меньшей колебательности, а быстродействие по моменту в связи с уменьшением увеличивается. Как следствие, необходимости коррекции контура регулирования момента при Тп= 0 не возникает.
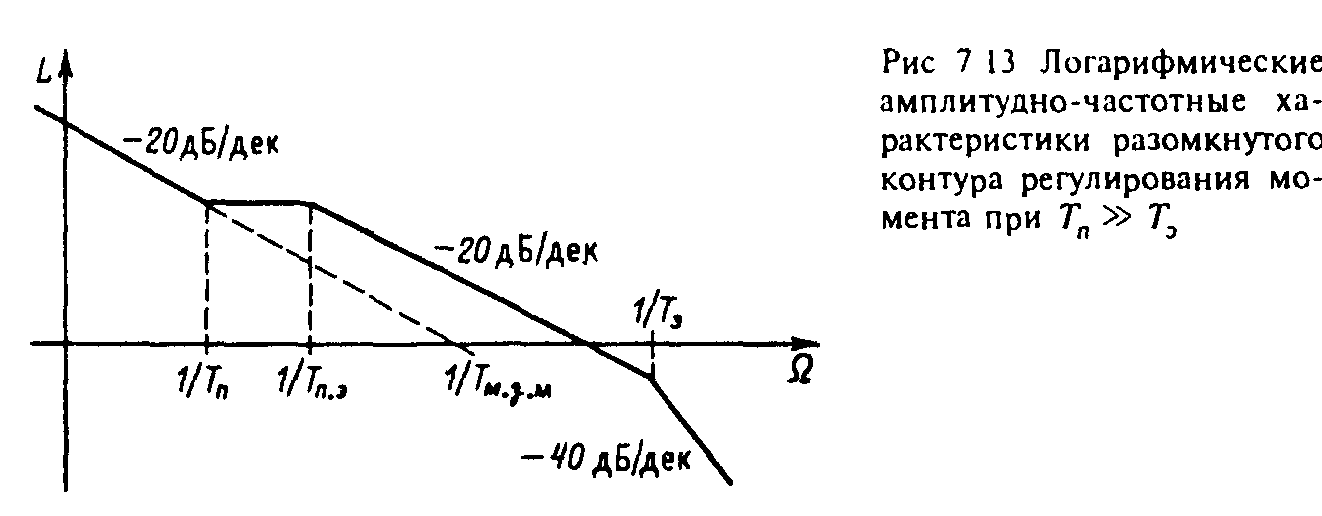
Учет инерционности преобразователя увеличивает порядок характеристического уравнения системы, что затрудняет оценку колебательности по его корням. Динамические свойства электропривода, замкнутого обратной связью по моменту, удобнее проанализировать по соответствующей ЛАЧХ разомкнутого контура:
При в структуре на рис. 7.12 звено динамической жесткости можно приближенно представить в виде (7.30) вместо (7.28), при этом
Соответствующая (7.34) ЛАЧХ показана на рис. 7.13. Анализируя (7.34) и рис. 7.13, можно установить, что при небольших и , а также при больших Тп и сильной отрицательной связи по моменту частота среза может находиться в области асимптоты с наклоном —40 дБ/дек и качество регулирования момента может быть неудовлетворительным.
Поэтому обычно при автоматическом регулировании момента электропривода требуется коррекция динамических свойств тем или иным способом. Без коррекции удается обойтись только в тех случаях, когда требования к быстродействию и точности регулирования момента и тока в динамике невысоки. При этом необходимая точность регулирования в статике обеспечивается введением критической положительной связи по скорости (или по напряжению генератора в системе Г—Д), а отрицательная связь по моменту (току) ослабляется до уровня, обеспечивающего требуемое демпфирование переходных процессов.



 момент короткого замыкания;
момент короткого замыкания;  — модуль статической жесткости;
— модуль статической жесткости; 
 — скорость идеального холостого хода в замкнутой системе регулирования.
— скорость идеального холостого хода в замкнутой системе регулирования. = 0 заданное значение момента стопорения электропривода
= 0 заданное значение момента стопорения электропривода  . Это значение может быть получено при различных коэффициентах обратной связи по моменту путем выбора соответствующих значений
. Это значение может быть получено при различных коэффициентах обратной связи по моменту путем выбора соответствующих значений  с помощью соотношения
с помощью соотношения
 при
при  , приведено на рис. 7.10,а. Рассматривая его, можно установить, что статическая точность регулирования момента в данной схеме при прочих равных условиях ограничена сильным возмущающим воздействием, оказываемым электромеханической связью. Вследствие действия этой связи изменения скорости двигателя в замкнутой системе регулирования оказывают на момент тем более значительное влияние, чем меньше коэффициент обратной связи по моменту. При возрастании
, приведено на рис. 7.10,а. Рассматривая его, можно установить, что статическая точность регулирования момента в данной схеме при прочих равных условиях ограничена сильным возмущающим воздействием, оказываемым электромеханической связью. Вследствие действия этой связи изменения скорости двигателя в замкнутой системе регулирования оказывают на момент тем более значительное влияние, чем меньше коэффициент обратной связи по моменту. При возрастании  жесткость статической характеристики уменьшается и при неограниченном возрастании
жесткость статической характеристики уменьшается и при неограниченном возрастании  стремится к нулю. Однако при реальных значениях этих величин исключить существенное влияние изменений скорости на точность регулирования момента без принятия специальных мер практически невозможно.
стремится к нулю. Однако при реальных значениях этих величин исключить существенное влияние изменений скорости на точность регулирования момента без принятия специальных мер практически невозможно. для получения момента
для получения момента  необходимо небольшое значение задающего сигнала
необходимо небольшое значение задающего сигнала  . Увеличение
. Увеличение  приводит к соответствующему возрастанию
приводит к соответствующему возрастанию  Поэтому при больших коэффициентах обратной связи на форме характеристик двигателя сказывается ограничение выходной переменной преобразователя, обусловленное в системе Г—Д насыщением магнитной цепи генератора и ограниченностью максимального напряжения возбуждения, в системе ТП—Д — необходимым ограничением предельных углов регулирования реверсивного преобразователя в выпрямительном и инверторном режимах и напряжением сети, а в системе ПЧ—АД — ограничением максимальной частоты. Если представить характеристику преобразователя линейной зависимостью
Поэтому при больших коэффициентах обратной связи на форме характеристик двигателя сказывается ограничение выходной переменной преобразователя, обусловленное в системе Г—Д насыщением магнитной цепи генератора и ограниченностью максимального напряжения возбуждения, в системе ТП—Д — необходимым ограничением предельных углов регулирования реверсивного преобразователя в выпрямительном и инверторном режимах и напряжением сети, а в системе ПЧ—АД — ограничением максимальной частоты. Если представить характеристику преобразователя линейной зависимостью  с идеальным ограничением максимального значения
с идеальным ограничением максимального значения  величиной
величиной  то легко установить, что пределы изменения скорости, в которых с помощью отрицательной связи по моменту обеспечивается с той или иной точностью регулирование момента, ограничены сверху и снизу характеристиками разомкнутой системы, соответствующими
то легко установить, что пределы изменения скорости, в которых с помощью отрицательной связи по моменту обеспечивается с той или иной точностью регулирование момента, ограничены сверху и снизу характеристиками разомкнутой системы, соответствующими  (рис. 7.10,а).
(рис. 7.10,а).
 и обратной связи
и обратной связи 
 — коэффициент положительной связи по скорости.
— коэффициент положительной связи по скорости.

 модуль статической жесткости быстро убывает и при критической положительной связи по скорости
модуль статической жесткости быстро убывает и при критической положительной связи по скорости  становится равным нулю. Дальнейшее увеличение knc приводит к изменению знака жесткости, как это показано на рис. 7.10,6. При критической положительной связи статическая ошибка, обусловленная изменениями скорости, исключается, и система обеспечивает астатическое регулирование момента без введения в цепь регулирования регуляторов с интегральной характеристикой.
становится равным нулю. Дальнейшее увеличение knc приводит к изменению знака жесткости, как это показано на рис. 7.10,6. При критической положительной связи статическая ошибка, обусловленная изменениями скорости, исключается, и система обеспечивает астатическое регулирование момента без введения в цепь регулирования регуляторов с интегральной характеристикой. = 0 получим уравнение динамической жесткости механической характеристики в замкнутой системе:
= 0 получим уравнение динамической жесткости механической характеристики в замкнутой системе:
 отрицательная обратная связь по моменту влияет на характеристики электропривода так же, как введение резистора в цепь якоря двигателя постоянного тока. Модуль жесткости
отрицательная обратная связь по моменту влияет на характеристики электропривода так же, как введение резистора в цепь якоря двигателя постоянного тока. Модуль жесткости  при этом уменьшается и одновременно уменьшается эквивалентная постоянная времени
при этом уменьшается и одновременно уменьшается эквивалентная постоянная времени 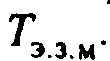
 ) снижается во всем диапазоне частот относительно жесткости в разомкнутой системе (кривые 2 и 2'), при этом точность регулирования момента в широком диапазоне частот остается высокой и ошибки регулирования с ростом частоты снижаются.
) снижается во всем диапазоне частот относительно жесткости в разомкнутой системе (кривые 2 и 2'), при этом точность регулирования момента в широком диапазоне частот остается высокой и ошибки регулирования с ростом частоты снижаются. , выражение (7.28) можно представить:
, выражение (7.28) можно представить:
 — эквивалентная постоянная времени преобразователя в замкнутой системе,
— эквивалентная постоянная времени преобразователя в замкнутой системе,  если приближенно принять
если приближенно принять  Соответствующие (7.30) ЛАЧХ и ЛФЧХ динамической жесткости замкнутой системы представлены на рис. 7.11,6. Они свидетельствуют о том, что при большой Тп высокая точность регулирования момента имеет место лишь при низких частотах, а в области средних и высоких частот динамические свойства замкнутой системы электропривода аналогичны динамическим свойствам разомкнутой системы. Таким же путем можно убедиться, что введение формирующей положительной связи по скорости влияет на вид ЛАЧХ и ЛФЧХ только в области низких частот, т. е. сказывается в основном на статической точности регулирования момента.
Соответствующие (7.30) ЛАЧХ и ЛФЧХ динамической жесткости замкнутой системы представлены на рис. 7.11,6. Они свидетельствуют о том, что при большой Тп высокая точность регулирования момента имеет место лишь при низких частотах, а в области средних и высоких частот динамические свойства замкнутой системы электропривода аналогичны динамическим свойствам разомкнутой системы. Таким же путем можно убедиться, что введение формирующей положительной связи по скорости влияет на вид ЛАЧХ и ЛФЧХ только в области низких частот, т. е. сказывается в основном на статической точности регулирования момента.
 оценим с помощью характеристического уравнения замкнутой системы, которое можно получить из передаточной функции замкнутого контура на рис. 7.12 при Мс= 0 в виде
оценим с помощью характеристического уравнения замкнутой системы, которое можно получить из передаточной функции замкнутого контура на рис. 7.12 при Мс= 0 в виде

 и уменьшает
и уменьшает  при этом соотношение постоянных m изменяется в сторону меньшей колебательности, а быстродействие по моменту в связи с уменьшением
при этом соотношение постоянных m изменяется в сторону меньшей колебательности, а быстродействие по моменту в связи с уменьшением  увеличивается. Как следствие, необходимости коррекции контура регулирования момента при Тп= 0 не возникает.
увеличивается. Как следствие, необходимости коррекции контура регулирования момента при Тп= 0 не возникает. увеличивает порядок характеристического уравнения системы, что затрудняет оценку колебательности по его корням. Динамические свойства электропривода, замкнутого обратной связью по моменту, удобнее проанализировать по соответствующей ЛАЧХ разомкнутого контура:
увеличивает порядок характеристического уравнения системы, что затрудняет оценку колебательности по его корням. Динамические свойства электропривода, замкнутого обратной связью по моменту, удобнее проанализировать по соответствующей ЛАЧХ разомкнутого контура:
 в структуре на рис. 7.12 звено динамической жесткости можно приближенно представить в виде (7.30) вместо (7.28), при этом
в структуре на рис. 7.12 звено динамической жесткости можно приближенно представить в виде (7.30) вместо (7.28), при этом
 и
и  , а также при больших Тп и сильной отрицательной связи по моменту
, а также при больших Тп и сильной отрицательной связи по моменту  частота среза может находиться в области асимптоты с наклоном —40 дБ/дек и качество регулирования момента может быть неудовлетворительным.
частота среза может находиться в области асимптоты с наклоном —40 дБ/дек и качество регулирования момента может быть неудовлетворительным.