3.1 Основные показатели регулирования координат ЭП.
Необходимость регулирования конкретных координат электропривода определяется технологическими требованиями. При этом выбор рационального способа регулирования из возможных является важной задачей, которая решается при проектировании электропривода. Для количественного определения предъявляемых к регулируемому электроприводу требований и для сопоставления между собой возможных способов регулирования используются обобщенные показатели регулирования. К их числу относятся точность, диапазон, плавность, динамические показатели качества и экономичность регулирования.
Точность регулирования переменной определяется возможными отклонениями ее от заданного значения под действием возмущающих факторов, например изменений нагрузки при регулировании скорости, изменений скорости при регулировании момента двигателя, колебаний напряжения сети и т. п. При регулировании в разомкнутой системе в качестве заданного может быть принято среднее значение координаты при известных пределах изменения всех возмущающих воздействий Fe, подлежащих учету в данном конкретном случае. При этом оценкой точности регулирования может служить отношение наибольшего отклонения к среднему значению
где — максимальное и минимальное значения переменной при данных значениях параметра или задающего сигнала и пределов изменения возмущений FB (рис. 6.1).
Таким образом, количественная оценка точности способа регулирования в относительных единицах зависит от среднего уровня регулируемой переменной и определяется конкретными пределами изменений возмущающих воздействий.
В зависимости от требований, предъявляемых к электроприводу, и особенностей регулируемой переменной оценка точности регулирования может относиться к статическим режимам работы либо охватывать и динамические процессы. В последнем случае в (6.1) следует подставлять значения , определенные при расчете переходного процесса, вызванного изменением задания или возмущения.
Количественная оценка точности регулирования по (6.1) во многих случаях применима и при автоматическом регулировании координат. Однако если по условиям работы электропривода важна точность воспроизведения значений регулируемой координаты, задаваемых на входе системы автоматического регулирования, требования к точности определяются допустимой ошибкой регулирования абсолютное значение которой при единичной обратной связи можно записать так.
Рис 6.1 К определению понятия Рис 6 2 К определению понятия
точности регулирования диапазона регулирования
где х3 — задающий сигнал, х — текущие значения регулируемой переменной в статических и динамических режимах работы.
При необходимости ошибку регулирования можно представить в относительных единицах, поделив (6.2) на х3
Диапазон регулирования характеризует пределы изменения средних значений переменной хср (либо ее значений, соответствующих конкретному уровню возмущающих воздействий), возможные при данном способе регулирования:
Возможные пределы регулирования переменной ограничиваются сверху максимально допустимыми или максимально реализуемыми значениями переменной, а снизу — требуемой точностью или минимально реализуемыми значениями переменной при данном способе регулирования. Сказанное поясняется характеристиками на рис. 6.2. На рисунке показано максимальное среднее значение регулируемой переменной , достижимое с учетом всех ограничений при некотором способе регулирования. Предположим, что способ регулирования позволяет снижать среднее значение регулируемой переменной вплоть до нуля Однако эту возможность нельзя использовать в связи с тем, что относительная ошибка регулирования как это следует из рассмотрения рис. 6.2, по мере снижения хср непрерывно увеличивается. Показанное на рис. 6.2 значение принято минимально допустимым по условиям точности регулирования, так как ему при заданном значении допустимой относительной ошибки соответствует соотношение
Заданный диапазон регулирования и необходимая при этом точность регулирования отдельных координат являются важными исходными данными при проектировании конкретных электроприводов.
Плавность регулирования характеризует число дискретных значений регулируемого параметра, реализуемых при данном способе регулирования в диапазоне регулирования. Ее можно оценить коэффициентом плавности
где j — значения переменных на соседних ступенях регулирования.
Чем выше число реализуемых ступеней регулирования, тем выше плавность. Оценка плавности — чисто технический показатель, связанный с условиями управления регулируемой переменной. Если управление связано с переключениями в силовой цепи системы электропривода, возможное число ступеней регулирования ограничивается приемлемыми габаритами коммутирующего устройства. Чем меньше мощность цепи, в которой нужно осуществлять изменения параметра, тем выше возможная плавность.
При проектировании необходимая плавность регулирования координаты обычно указывается в качестве одного из технологических требований к электроприводу.
При рассмотрении переходных процессов в разомкнутых системах уже отмечалось, что динамические качества электропривода во многих случаях определяют производительность промышленной установки, износ механического оборудования, качество продукции и т. п. Соответственно важное значение имеют динамические показатели регулируемого электропривода: быстродействие, перерегулирование и колебательность.
Быстродействие определяет быстроту реакции электропривода на изменения воздействий. Главным показателем быстродействия, непосредственно влияющим на производительность ряда механизмов, является время пуска tп и торможения tт электропривода.
При автоматическом регулировании координат быстродействие характеризуют показателями переходного процесса отработки скачка задания На рис 6 3 показан примерный вид такого процесса и указаны показатели быстродействия: время регулирования за которое переменная первый раз достигает установившегося значения ; время первого максимума ; общее время переходного процесса за которое затухают все его свободные составляющие
Перерегулирование представляет собой динамическую ошибку и характеризуется максимальным отклонением от Как правило, перерегулирование выражают в относительных единицах:
или в процентах Очевидно, этот динамический показатель должен учитываться при определении динамической точности отработки электроприводом заданных значений координаты.
Колебательность электропривода является фактором, влияющим на точность, динамические нагрузки и качество технологического процесса. Ее общим показателем могут служить значения логарифмических декрементов, соответствующие комплексно-сопряженным корням характеристического уравнения системы.
Важным показателем регулируемого электропривода является его экономичность. Применение регулируемого электропривода связано с определенными дополнительными первоначальными затратами и эксплуатационными расходами, которые должны окупаться повышением производительности и надежности работы установки, а также улучшением качества продукции Экономическая эффективность регулируемого электропривода в каждом конкретном случае должна определяться технико-экономическим расчетом, учитывающим все указанные факторы При сравнении различных способов регулирования ориентировочное суждение о капитальных затратах можно составить, оценивая массогабаритные показатели дополнительного оборудования по его установленной мощности, а эксплуатационные затраты на электроэнергию — КПД, характеризующим потери энергии, и , характеризующим реактивную мощность при регулировании.
Для регулируемых электроприводов с вентильными преобразователями, которые вносят искажения в форму потребляемого из сети тока, важным энергетическим показателем служит коэффициент мощности:
где — сдвиг по фазе между первой гармоникой потребляемого тока и напряжением сети; — коэффициент искажений, характеризующий отношение эффективного значения первой гармоники тока к эффективному значению реальной кривой потребляемого тока, содержащей высшие гармонические
3.2 Стандартные настройки контуров регулирования.
При последовательной коррекции структурная схема контура регулирования переменной х может быть представлена, как показано на рис. 6.16, состоящей из регулятора с передаточной функцией и объекта регулирования с передаточной функцией Передаточная функция разомкнутого контура
Примем, что передаточная функция объекта регулирования имеет вид
где — постоянное запаздывание; — постоянные времени элементов объекта регулирования, расположенные в порядке убывания по значению.
Предположим, что передаточная функция регулятора реализована в виде
где — число больших и средних постоянных времени.
Тогда передаточная функция разомкнутого контура
Полученное выражение свидетельствует о том, что формированием передаточной функции регулятора можно направленно видоизменять передаточную функцию разомкнутого контура. Действительно, при А исходная передаточная функция существенно видоизменяется:
В ней введением регулятора с передаточной функцией (6.26) и подбором его параметров исключено инерционных звеньев, обладающих большими и средними , сокращено и частных коэффициентов и введено интегрирующее звено.
Исключение из передаточной функции разомкнутого контура звеньев с большими и средними постоянными времени открывает возможности повышения быстродействия контура регулирования. Эта операция реальные физические инерционные звенья из контура, разумеется, не исключает Однако их действие, замедляющее протекание переходных процессов, компенсируется дей-
Рис. 6.18 Частотные характеристики контура регулирования при последовательной коррекции
ствием соответствующих форсирующих звеньев, содержащихся в регуляторе, ускоряющих в требуемой степени реакцию системы.
Введение интегрирующего звена, которое в отсутствовало, обеспечивает повышение точности регулирования, так как контур приобретает астатизм первого порядка (v = 1). Положительным изменением является и исключение частных коэффициентов контура регулирования, благодаря которому все показатели регулирования определяются обобщенным фактором — соотношением постоянных времени инерционных элементов контура.
Пытаться компенсировать весьма малые постоянные времени звеньев контура нецелесообразно, так как технические трудности компенсации быстро возрастают при уменьшении значений постоянных времени, а влияние на быстродействие привода соответственно убывает. Особые трудности представляет компенсация дискретности и малого запаздывания ряда быстродействующих преобразователей. Как следствие, в (6.28) остались некомпенсированными несколько малых постоянных и постоянная .
Достоинством (6.28) является возможность выбора требуемого значения постоянной Т0. Этот выбор и определяет настройку контура регулирования.
Если выбрать Т0 из условия как было принято, является наибольшей из оставшихся некомпенсированными постоянных то можно представить частотные характеристики (6.28), как показано на рис. 6.18 Низко- и среднечастотная асимптота ЛАЧХ имеет наклон -20 дБ/дек (прямая ), а запас по фазе на частоте среза , определяемый по кривой 2, зависит от степени удаленности частоты среза от ближайшей частоты сопряжения С учетом постоянной запаздывания влияние которой в кривой 2 проявляется, запас по фазе на частоте среза составит:
Углы в (6.29) невелики, так как на соответствующих частотах сопряжения . Так как ,, и приближенно можно принять
Следовательно,
где — суммарная некомпенсированная постоянная контура регулирования, эквивалентная по потере запаса по фазе на частоте среза всем его реальным некомпенсированным инерционностям.
С учетом (6.30) передаточную функцию (6.28) можно с достаточной точностью представить в виде
Соответствующая (6.31) ЛАЧХ контура регулирования в области низких и средних частот совпадает с прямой 1 (рис. 6.18), а в области высоких частот представляется асимптотой 3, имеющей наклон -40 дБ/дек. Частота сопряжения для этой асимптоты расположена ближе к частоте среза, чем и учитывается определяемое (6.29) влияние всех малых постоянных на динамические свойства контура регулирования.
Таким образом, доказано, что при выполнении определенных условий свойства контура регулирования с приемлемой для инженерной практики точностью при последовательной коррекции определяются передаточной функцией (6.31), имеющей второй порядок
При этом передаточная функция замкнутого контура регулирования будет иметь вид
а корни характеристического уравнения равны
где — соотношение постоянных контура регулирования При а < 4 движение электропривода в переходном процессе при скачке задания и нулевых начальных условиях определяется следующим уравнением
Суммарная некомпенсируемая постоянная полностью определяет быстродействие электропривода по показателю общего времени переходного процесса В соответствии с (6 32) свободные составляющие переходного процесса затухают в течение времени
Колебательность электропривода аналогично разомкнутой линеаризованной системе определяется соотношением постоянных контура а, этот же показатель определяет перерегулирование. Следовательно, подбором соотношения постоянных а можно обеспечить требуемые динамические показатели при быстродействии, ограниченном уровнем суммарной некомпенсированной постоянной времени
Изложенное составляет основу широко используемого в практике электропривода инженерного метода синтеза контуров регулирования координат электропривода Задавшись требуемым со отношением постоянных а и определив по (6.30) можно записать желаемую передаточную функцию разомкнутого контура
передаточная функция объекта регулирования имеет вид:
Передаточная функция регулятора в соответствии с (6.24) определяется так:
Рассматривая (6 36), можно убедиться, что передаточная функция регулятора по мере увеличения числа компенсируемых постоянных /усложняется При (все малы) она принимает вид
где
В этом случае регулятор представляет собой интегратор с постоянной интегрирования Ти (И-регулятор). При
т. с. требуется пропорционально-интегральный регулятор (ПИ- регулятор) При необходим пропорциональный интегро- дифференциальный регулятор (ПИД-регулятор) и с дальнейшим увеличением / в его передаточной функции требуется двухкратное и большей кратности дифференцирование входного сигнала Исходя из требования необходимой помехозащищенности контура, допускают лишь однократное дифференцирование сигнала, т. с. компенсируют не больше двух больших и средних по-
стоянных времени. Если в контуре регулирования координаты х имеется больше двух подлежащих компенсации больших и средних постоянных прибегают к введению подчиненных контуров регулирования.
Допустим, необходимо регулировать выходную переменную х3 электропривода, структурная схема которого показана на рис. 6.19, причем по условиям помехозащищенности желательно применять регуляторы не сложнее ПИ-регулятора. Эту задачу можно решить, если ввести вспомогательные контуры регулирования таким образом, чтобы в каждом контуре оказалась только одна из подлежащих компенсации постоянных
В структуре на рис. 6.19,о в контуре регулирования требуется, чтобы имелась компенсация трех больших и средних постоянных и регулятор при одноконтурной системе в передаточной функции содержал бы-дифференцирующую составляющую второго порядка. В соответствии с (6.36) при этом
Передаточная функция объекта регулирования переменной
Определяем передаточную функцию регулятора.
где
Как и требовалось, получен ПИ-регулятор. Передаточная функция замкнутого первого контура
С учетом (6.42) передаточная функция объекта регулирования переменной х2 принимает вид
Если выбрать о, таким образом, чтобы внутренний контур представлял собой высокодемпфированное звено, (6.43) можно существенно упростить. Выполненные расчеты и практика настройки регулируемых электроприводов показывают, что без большой погрешности для оценки качества регулирования в знаменателе (6.42) при переходе к (6.43) можно отбросить член второго порядка, при этом
Объект регулирования переменной х2 наглядно представлен на рис. 6.19,в. Здесь показано, что в результате введения первого контура из второго контура регулирования исключена большая постоянная T1 а оценка некомпенсированных инерционностей второго контура принимает значение Соответственно желаемая передаточная функция для второго контура запишется в виде
передаточная функция регулятора х2 получается путем деления (6.45) на (6.44):
Где
Вновь получена передаточная функция ПИ-рсгулятора. Передаточная функция замкнутого второго контура
Выбором а2 и здесь обеспечиваются свойства высокодемпфи- рованного колебательного звена, что при переходе к регулированию основной координаты х3 позволяет представить передаточную функцию объекта регулирования в упрошенном виде:
Структурная схема внешнего контура регулирования переменной х3 при введении двух вспомогательных контуров регулирования, как показано на рис 6 19,г, претерпевает существенные изменения Сравнивая рис. 6 19,г с рис. 6.19,а, можно установить, что в результате введения контуров регулирования х1 и х2 на динамику внешнего контура в пределах линейности системы исключено влияние больших постоянных времени Т1 и Т2. Однако при этом изменилась суммарная некомпенсированная инерционность контура, оценка которой составляет Желаемая передаточная функция при этом запишется в виде
Передаточная функция регулятора х3
где — постоянная времени ПИ-регулятора переменной х3.
При принимавшихся по мере решения задачи допущениях передаточная функция замкнутого внешнего контура регулирования приближенно соответствует колебательному звену второго порядка:
Из изложенного следует, что введение вспомогательных контуров регулирования имеет целью формирование
благоприятной для последовательной коррекции передаточной функции объекта регулирования (рис. 6.19,г). Вспомогательные контуры называют подчиненными контурами регулирования, а структура на рис. 6.19,6 представляет собой структуру подчиненного регулирования координат электропривода.
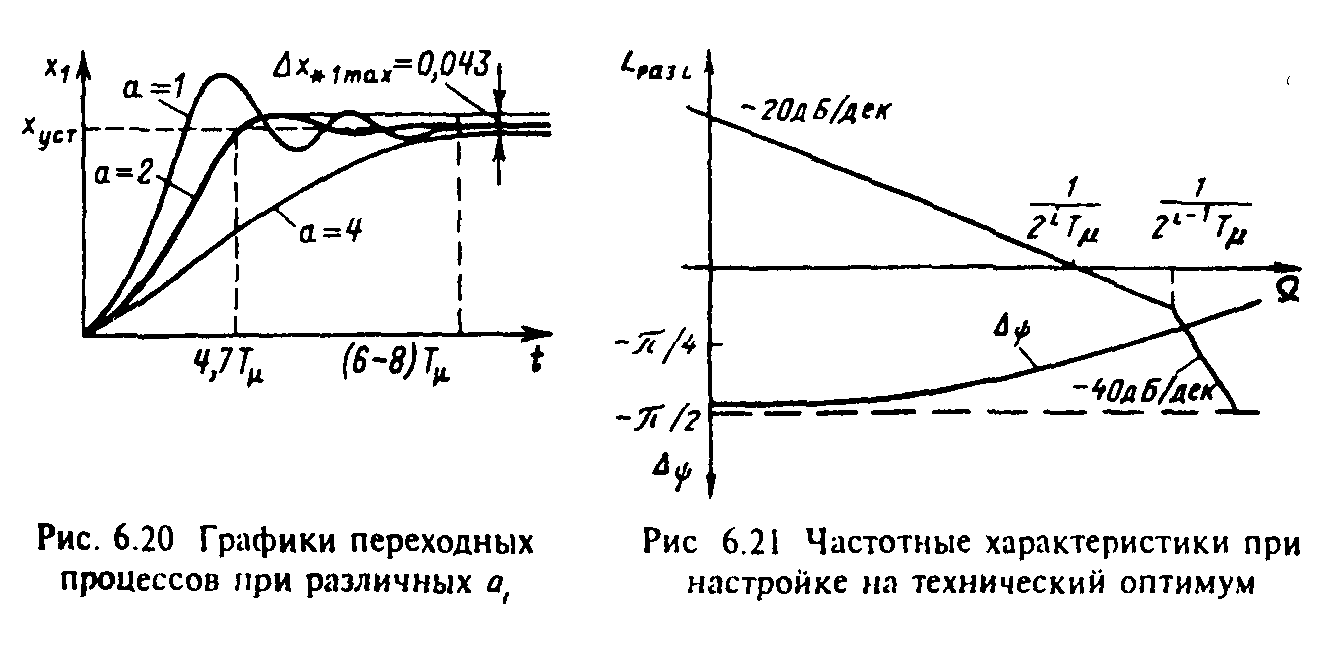
Динамические показатели качества регулирования каждой переменной определяются соотношением постоянных а1 На
рис. 6.20 представлен ряд зависимостей при различных значениях а1. Если а1 = 4, переходный процесс имеет апериодический характер, а время регулирования . Умень-
шсние а1, до а1 = 2 явно увеличивает колебательность, появляется перерегулирование, при этом время регулирования уменьшается. Дальнейшее уменьшение а1 влечет за собой быстрое возрастание колебательности и перерегулирования, а эффект уменьшения tp постепенно снижается.

 к среднему значению
к среднему значению 

 — максимальное и минимальное значения переменной при данных значениях параметра или задающего сигнала и пределов изменения возмущений FB (рис. 6.1).
— максимальное и минимальное значения переменной при данных значениях параметра или задающего сигнала и пределов изменения возмущений FB (рис. 6.1). абсолютное значение которой при единичной обратной связи можно записать так.
абсолютное значение которой при единичной обратной связи можно записать так. Рис 6.1 К определению понятия Рис 6 2 К определению понятия
точности регулирования диапазона регулирования
Рис 6.1 К определению понятия Рис 6 2 К определению понятия
точности регулирования диапазона регулирования

 , достижимое с учетом всех ограничений при некотором способе регулирования. Предположим, что способ регулирования позволяет снижать среднее значение регулируемой переменной вплоть до нуля Однако эту возможность нельзя использовать в связи с тем, что относительная ошибка регулирования
, достижимое с учетом всех ограничений при некотором способе регулирования. Предположим, что способ регулирования позволяет снижать среднее значение регулируемой переменной вплоть до нуля Однако эту возможность нельзя использовать в связи с тем, что относительная ошибка регулирования  как это следует из рассмотрения рис. 6.2, по мере снижения хср непрерывно увеличивается. Показанное на рис. 6.2 значение
как это следует из рассмотрения рис. 6.2, по мере снижения хср непрерывно увеличивается. Показанное на рис. 6.2 значение  принято минимально допустимым по условиям точности регулирования, так как ему при заданном значении допустимой относительной ошибки
принято минимально допустимым по условиям точности регулирования, так как ему при заданном значении допустимой относительной ошибки  соответствует соотношение
соответствует соотношение

 j — значения переменных на соседних ступенях регулирования.
j — значения переменных на соседних ступенях регулирования.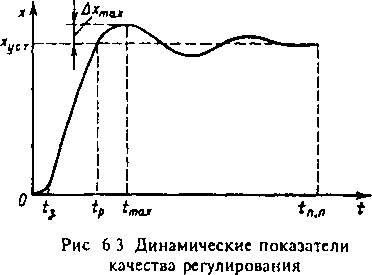 При проектировании необходимая плавность регулирования координаты обычно указывается в качестве одного из технологических требований к электроприводу.
При проектировании необходимая плавность регулирования координаты обычно указывается в качестве одного из технологических требований к электроприводу. за которое переменная первый раз достигает установившегося значения
за которое переменная первый раз достигает установившегося значения  ; время первого максимума
; время первого максимума  ; общее время переходного процесса
; общее время переходного процесса  за которое затухают все его свободные составляющие
за которое затухают все его свободные составляющие Как правило, перерегулирование выражают в относительных единицах:
Как правило, перерегулирование выражают в относительных единицах:
 Очевидно, этот динамический показатель должен учитываться при определении динамической точности отработки электроприводом заданных значений координаты.
Очевидно, этот динамический показатель должен учитываться при определении динамической точности отработки электроприводом заданных значений координаты. , характеризующим реактивную мощность при регулировании.
, характеризующим реактивную мощность при регулировании.
 — сдвиг по фазе между первой гармоникой потребляемого тока и напряжением сети;
— сдвиг по фазе между первой гармоникой потребляемого тока и напряжением сети;  — коэффициент искажений, характеризующий отношение эффективного значения первой гармоники тока к эффективному значению реальной кривой потребляемого тока, содержащей высшие гармонические
— коэффициент искажений, характеризующий отношение эффективного значения первой гармоники тока к эффективному значению реальной кривой потребляемого тока, содержащей высшие гармонические и объекта регулирования с передаточной функцией
и объекта регулирования с передаточной функцией  Передаточная функция разомкнутого контура
Передаточная функция разомкнутого контура
 — постоянное запаздывание;
— постоянное запаздывание;  — постоянные времени элементов объекта регулирования, расположенные в порядке убывания по значению.
— постоянные времени элементов объекта регулирования, расположенные в порядке убывания по значению.
 — число больших и средних постоянных времени.
— число больших и средних постоянных времени.
 исходная передаточная функция существенно видоизменяется:
исходная передаточная функция существенно видоизменяется:
 инерционных звеньев, обладающих большими и средними
инерционных звеньев, обладающих большими и средними  , сокращено и частных коэффициентов и введено интегрирующее звено.
, сокращено и частных коэффициентов и введено интегрирующее звено.
 отсутствовало, обеспечивает повышение точности регулирования, так как контур приобретает астатизм первого порядка (v = 1). Положительным изменением является и исключение частных коэффициентов
отсутствовало, обеспечивает повышение точности регулирования, так как контур приобретает астатизм первого порядка (v = 1). Положительным изменением является и исключение частных коэффициентов  контура регулирования, благодаря которому все показатели регулирования определяются обобщенным фактором — соотношением постоянных времени инерционных элементов контура.
контура регулирования, благодаря которому все показатели регулирования определяются обобщенным фактором — соотношением постоянных времени инерционных элементов контура. ряда быстродействующих преобразователей. Как следствие, в (6.28) остались некомпенсированными несколько
ряда быстродействующих преобразователей. Как следствие, в (6.28) остались некомпенсированными несколько  малых постоянных
малых постоянных  и постоянная
и постоянная  .
. как было принято, является наибольшей из оставшихся некомпенсированными постоянных
как было принято, является наибольшей из оставшихся некомпенсированными постоянных  то можно представить частотные характеристики (6.28), как показано на рис. 6.18 Низко- и среднечастотная асимптота ЛАЧХ имеет наклон -20 дБ/дек (прямая
то можно представить частотные характеристики (6.28), как показано на рис. 6.18 Низко- и среднечастотная асимптота ЛАЧХ имеет наклон -20 дБ/дек (прямая  ), а запас по фазе на частоте среза
), а запас по фазе на частоте среза  , определяемый по кривой 2, зависит от степени удаленности частоты среза
, определяемый по кривой 2, зависит от степени удаленности частоты среза  от ближайшей частоты сопряжения
от ближайшей частоты сопряжения  С учетом постоянной запаздывания
С учетом постоянной запаздывания  влияние которой в кривой 2 проявляется, запас по фазе на частоте среза составит:
влияние которой в кривой 2 проявляется, запас по фазе на частоте среза составит:
 в (6.29) невелики, так как на соответствующих частотах сопряжения
в (6.29) невелики, так как на соответствующих частотах сопряжения  . Так как
. Так как  ,,
,,  и приближенно можно принять
и приближенно можно принять 

 — суммарная некомпенсированная постоянная контура регулирования, эквивалентная по потере запаса по фазе на частоте среза всем его реальным некомпенсированным инерционностям.
— суммарная некомпенсированная постоянная контура регулирования, эквивалентная по потере запаса по фазе на частоте среза всем его реальным некомпенсированным инерционностям.
 расположена ближе к частоте среза, чем и учитывается определяемое (6.29) влияние всех малых постоянных на динамические свойства контура регулирования.
расположена ближе к частоте среза, чем и учитывается определяемое (6.29) влияние всех малых постоянных на динамические свойства контура регулирования.

 — соотношение постоянных контура регулирования При а < 4 движение электропривода в переходном процессе при скачке задания и нулевых начальных условиях определяется следующим уравнением
— соотношение постоянных контура регулирования При а < 4 движение электропривода в переходном процессе при скачке задания и нулевых начальных условиях определяется следующим уравнением
 полностью определяет быстродействие электропривода по показателю общего времени переходного процесса
полностью определяет быстродействие электропривода по показателю общего времени переходного процесса  В соответствии с (6 32) свободные составляющие переходного процесса затухают в течение времени
В соответствии с (6 32) свободные составляющие переходного процесса затухают в течение времени


 (все
(все  малы) она принимает вид
малы) она принимает вид

 необходим пропорциональный интегро- дифференциальный регулятор (ПИД-регулятор) и с дальнейшим увеличением / в его передаточной функции требуется двухкратное и большей кратности дифференцирование входного сигнала Исходя из требования необходимой помехозащищенности контура, допускают лишь однократное дифференцирование сигнала, т. с. компенсируют не больше двух больших и средних по-
необходим пропорциональный интегро- дифференциальный регулятор (ПИД-регулятор) и с дальнейшим увеличением / в его передаточной функции требуется двухкратное и большей кратности дифференцирование входного сигнала Исходя из требования необходимой помехозащищенности контура, допускают лишь однократное дифференцирование сигнала, т. с. компенсируют не больше двух больших и средних по-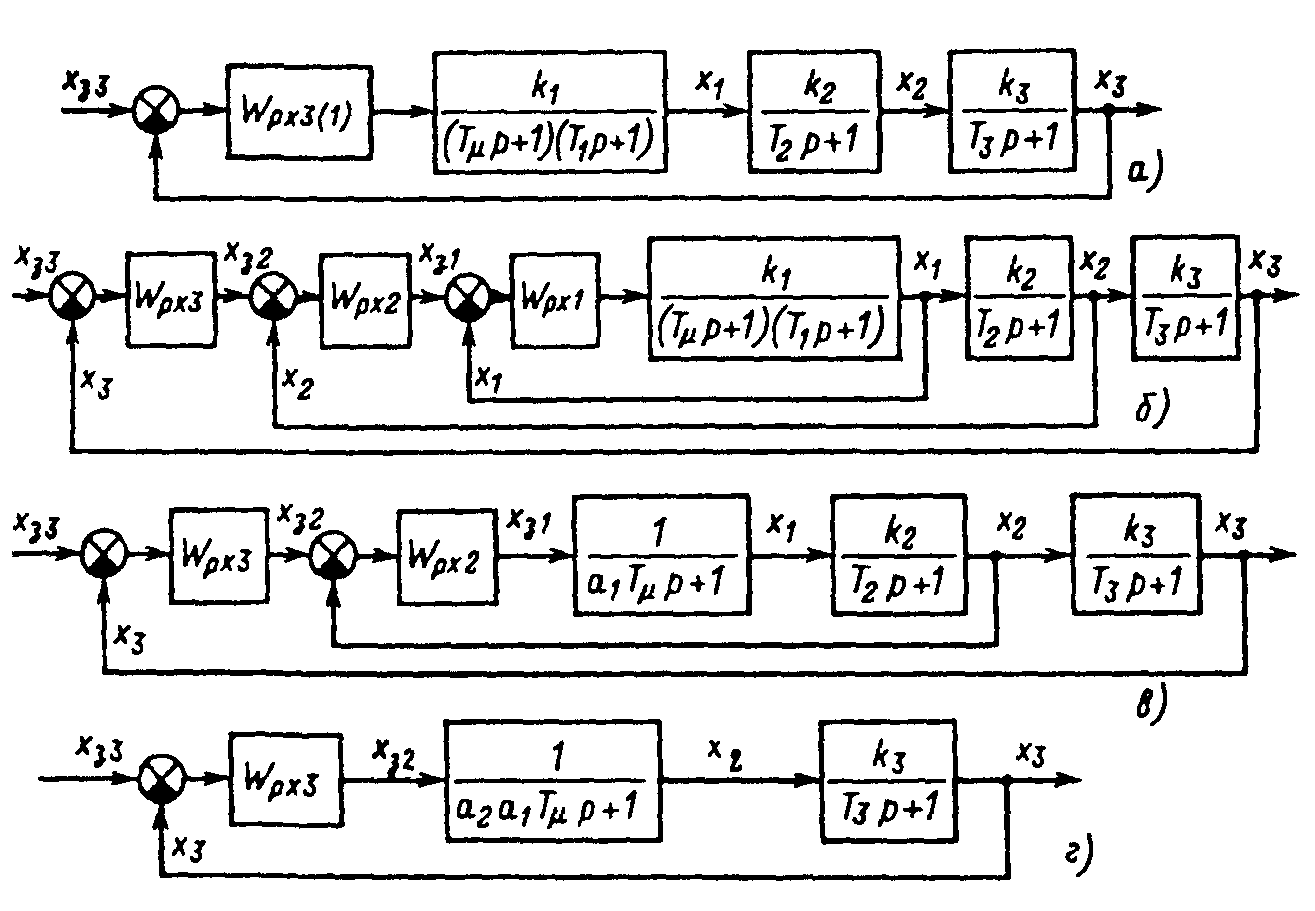
 прибегают к введению подчиненных контуров регулирования.
прибегают к введению подчиненных контуров регулирования.
 требуется, чтобы имелась компенсация трех больших и средних постоянных
требуется, чтобы имелась компенсация трех больших и средних постоянных  и регулятор
и регулятор  при одноконтурной системе в передаточной функции содержал бы-дифференцирующую составляющую второго порядка. В соответствии с (6.36) при этом
при одноконтурной системе в передаточной функции содержал бы-дифференцирующую составляющую второго порядка. В соответствии с (6.36) при этом






 Соответственно желаемая передаточная функция для второго контура запишется в виде
Соответственно желаемая передаточная функция для второго контура запишется в виде



 Желаемая передаточная функция при этом запишется в виде
Желаемая передаточная функция при этом запишется в виде

 — постоянная времени ПИ-регулятора переменной х3.
— постоянная времени ПИ-регулятора переменной х3.
 при различных значениях а1. Если а1 = 4, переходный процесс имеет апериодический характер, а время регулирования
при различных значениях а1. Если а1 = 4, переходный процесс имеет апериодический характер, а время регулирования  . Умень-
. Умень-