Грузоподъемность - 8000Н
Скорость подъема кабины - 1,5м/с
Масса кабины - 300кг
Диаметр канатоведущего шкива - 0,7м
КПД системы - 0,8
Высота подъема - 10 м
Число несущих канатов - 4
Масса одного погонного метра канатов - 0,5 кг
Передаточное число редуктора - 36
Момент инерции редуктора и канатоведущего шкива составляет 20% от момента инерции двигателя.
Максимально допустимое ускорение и замедление - 1,5м/с2
Допустимая неточность останова -  0,02 м
0,02 м
Время работы аппаратов, дающих импульс на торможение - 0,25с 15%
Относительное отклонение массы груза - 20%
Тормозной момент механического тормоза равен 1,75 от номинальному момента электродвигателя
Отклонение момента тормоза - 15%
Время паузы от подъема до спуска - 50с
Время паузы после спуска до нового подъема - 70с
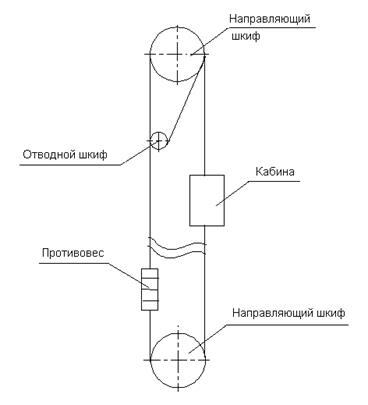
Рис.1 Кинематическая схема
Технические условия:
1. Сеть переменного тока, напряжением 220В.
2. Для привода подъемника используется двигатель постоянного тока независимого возбуждения.
3. Работа подъемника состоит в попеременном подъеме кабины с грузом и опускании порожней кабины.
4. При останове с пониженной скоростью применяется торможение наложением механического тормоза.
5. Моментами инерции направляющего и отводного шкивов пренебречь.
6. Кинематическая схемы приведена на рис.1
