Рассмотрим электронную часть системы контроля автомобильного одометра, которая отображает общий пробег автомобиля с момента изготовления, а также дальность последней поездки (так называемый путевой одометр).
Основным входным сигналом системы является сигнал от автомобильного тахометра, который формирует импульсы при каждом обороте маховика двигателя. Подсчитав суммарное количество этих импульсов, можно определить количество оборотов двигателя, а по интервалу между импульсами можно вычислить скорость движения автомобиля. Разумеется, реальный путь, проходимый автомобилем, зависит от передаточного числа коробки передач, поэтому нам необходимо знать о том, какая из пяти передач была включена водителем в каждый момент времени.
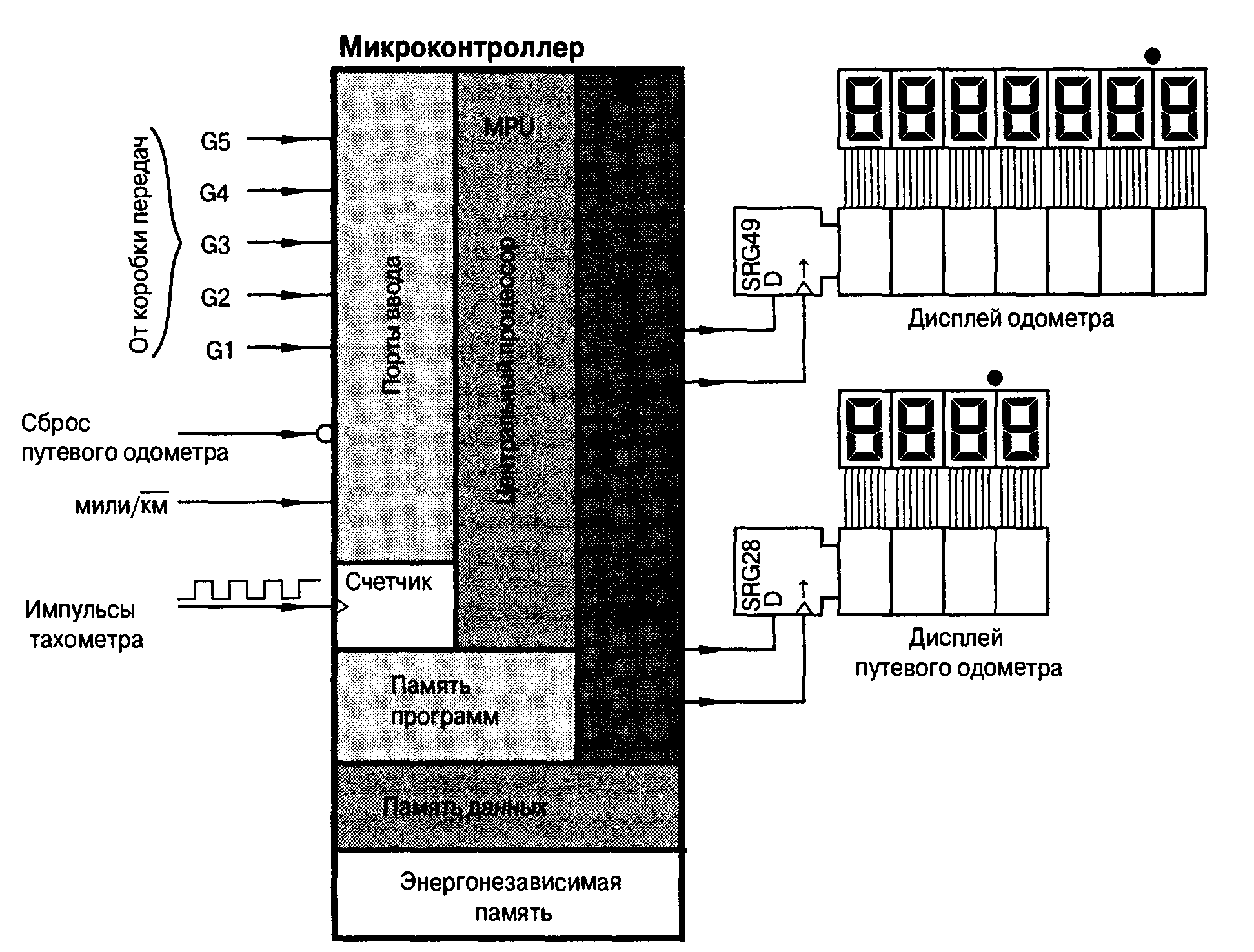
Эта информация поступает из коробки передач по линиям G5, ..., G1 (обычно обозначаемым как G[5:1]). Включенной передаче соответствует напряжение ВЫСОКОГО уровня на соответствующей линии (передача заднего хода не учитывается). Два дополнительных входа предназначены для задания единицы измерения отображаемых значений (мили или километры) и для обнуления путевого одометра.
Рис.4.6. Пример микроконтроллерной системы
Собственно дисплей одометра представляет собой семиразрядный 7-сегментный индикатор, которыйотображает общий пробег авто - значения до 999999.9. Поскольку общее число сегментов довольно велико (целых 49), то для управления индикатором используется сдвиговый регистр (см.Рис. 3.20), данные в который передаются по одной линии(Рис. 4.6). По второй лини передаются тактовые импульсы—для полного обновления содержимого дисплея необходимо 49 импульсов.
Дисплей путевого одометра является 4-разрядным и отображает дальность последней поездки - значения до 999.9 • Сдвиговый регистр этого дисплея тоже управляется по двум линиям, только в данном случае для вывода нового 4-разрядного значения необходимо 28 тактовых импульсов.
Для реализации этой системы нам потребуются следующие ресурсы:
•Вход, срабатывающий по фронту и подключенный к счетчику/таймеру для подсчета числа оборотов вала двигателя (на этот вход поступают импульсы от тахометра).
• Семь цифровых входов для ввода текущего передаточного отношения, задания единицы отображения (мили/км) и для сброса путевого одометра.
• Четыре цифровых выхода для тактирования двух сдвиговых регистров и передачи информации о сегментах.
• Микропроцессор для выполнения вычислений, считывания входных сигналов и формирования выходных.
• Память программ, обычно ПЗУ какого-либо типа.
• Память данных для хранения рабочих переменных программы, обычно статическое ОЗУ.
• Энергонезависимая память для долговременного хранения информации, такой как суммарный путь, пройденный автомобилем, и расстояние, пройденное с момента последнего сброса путевого одометра.
Все эти функции могут быть реализованы в одной интегральной микросхеме, называемой в данном случае микроконтроллером, т.е. микропроцессором, интегрированным на одном кристалле со вспомогательными схемами и выполняющим работу целого микрокомпьютера. Разумеется, перечисленные ресурсы имеют отношение только к нашему примеру.
ОСНОВНЫЕ ПОЛОЖЕНИЯ НА ПАМЯТЬ
- Последовательность операций «выборка команды/ее дешифрация/исполнение», т.е. так называемый цикл выборки — исполнения команды, является фундаментальным понятием, необходимым для понимания работы компьютера.
- Во всех вычислительных устройствах память используется для хранения как кода программы, так и данных. Память с произвольным доступом характеризуется содержимым, хранящимся в группе ячеек, и расположением (адресом) каждой ячейки. В системах с гарвардской архитектурой каждая область памяти имеет собственные шины адреса и данных.
- Команды располагаются в памяти программ последовательно. Для поочередной адресации каждой команды используется двоичный суммирующий счетчик- счетчик команд (Ргоgгаm Соunter — РС).
- Устройство управления инкрементирует счетчик после выборки каждой команды. Непосредственно загружая новый адрес в счетчик команд, можно осуществить переход к другому участку кода.
- Устройство управления включает в себя регистр команд и дешифратор команд. Регистр команд состоит из двух регистров IR1 и IR2, выполненных в виде конвейера и последовательно принимающих код команды. Дешифратор декодирует полученный из РК код, определяя выполняемое ЦП действие, при этом УУ формирует необходимые для него сигналы.
- Хотя основные узлы микроконтроллера являются общими для широкого круга приложений, интерфейс ввода/вывода необходимо подбирать под каждую конкретную задачу. Причем эти периферийные модули могут быть самыми разными.
-Под адресацией понимают способ определения операнда. Различают следующие режимы:
Регистровой. Операнд находится в регистре, который определяется командой.
Непосредственный. Операнд размером 8 бит входит в состав команды
Регистровый косвенный. Адрес операнда находится в регистре выбора FSR.
ВОПРОСЫ ДЛЯ САМОПРОВЕРКИ
1. Назовите семь принципов ЭВМ, реализующей принцип фон-неймановской архитектуры.
2. Укажите достоинства ЭВМ с гарвардской архитектурой.
4. Можете ли вы предложить вариант инкрементирования и декрементирования содержимого рабочего регистра с использованием трех команд, рассмотренных выше?
5. Для подключения коробки передач к микроконтроллерной системе рис.4.6 требуется пять выводов. Многие микросхемы выпускаются в корпусах с малым количеством выводов. Как можно уменьшить требуемое число выводов? Подсказка: взгляните на рис. 3.6.
6. Каким способом можно уменьшить количество выводов микроконтроллера, требуемых для управления дисплеями обоих одометров и насколько это будет удобно?
10. Какое обозначение имеет регистр косвенной адресации? С чем имеет дело команда, если он используется в качестве второго операнда?