Пример 1. Даны векторы 1(2 ; 4 ; 3 ; 2), 2(4 ; 2 ; 2 ; 8), 3(4 ; 5 ; 8 ; 7), 4(6 ; 7 ; 5 ; 3) и (18 ; 24 ; 13 ; 6). Показать, что векторы 1, 2, 3, 4 образуют базис четырехмерного линейного пространства R4 и найти координаты вектора в этом базисе.
Решение.
Выражение х1+1+х22+…+хкк называется линейной комбинацией векторов 1, 2, … к с коэффициентами х1, х2, …хк. Любая линейная комбинация векторов линейного пространства представляет собой вектор того же пространства. Если некоторый вектор линейного пространства представлен в виде линейной комбинации векторов 1,…, к того же пространства, т.е.
(1)
то говорят, что вектор разложен по векторам 1,… к Система векторов 1, 2, … к некоторого линейного пространства называется линейно независимым, если равенство
(2)
имеет место только при нулевых значениях коэффициентов х1, х2, … , хк, если же равенство (2) выполняется и при условии, что хотя бы один из коэффициентов х1, х2, … , хк, отличен от нуля, то система векторов 1, 2, … к называется линейно зависимой.
Для векторов с заданными координатами 1(х1, y1, z1, p1), 2(x2, y2, z2, p2), 3(x3, y3, z3, p3), 4(x4, y4, z4, p4), составим определитель и вычислим его.
(3)
Подставим в (3) данные векторы 1, 2, 3, 4 , получим
Так как , то векторы линейно независимы и они образуют базис линейного пространства R4 . Для вычисления координат вектора в этом базисе составим систему линейных уравнений из координат векторов 1, 2, 3, 4 и и решим ее методом Гаусса:
*
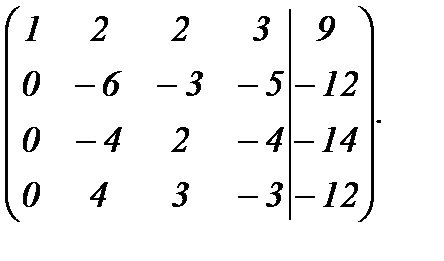
Составим матрицу системы и преобразуем ее к треугольному виду, т.е. будем последовательно получать нули ниже главной диагонали матрицы, на которых находятся элементы 2, 2, 8, 3.
Разделим каждый элемент I строки на 2, затем полученную I строку умножим последовательно на -4; -3; -2 и сложим соответственно со II; III и IV строками, получим:
~
Разделим III строку на (-2) и поменяем ее местами со II строкой.
Новую II строку умножим последовательно на 3; -2 и сложим соответственно с III и IV строками, получим:
III строку умножим на 5, IV на 6 и сложим их, получим:
Таким образом получим матрицу ступенчатого вида, например х1, х2, х3, х4,
откуда х4 = 3, х3 = -1, х2 = 0, х1 = 2.
Решение системы * (2; 0; -1; 3) образует совокупность координат вектора в базисе 1, 2, 3, 4 , т.е. в этом базисе (2; 0; -1; 3) или = 2 1 - 3 + 3 4.
8) уравнение высоты, опущенной из вершины А4 на грань А1 А2 А3 . Сделать чертеж.
Решение.
1) Расстояние d между точками А(х1, y1, z1) и В(х2, y2, z2), определяется по формуле
(1)
Подставим в (1) координаты точек А1 и А2 , находим длину ребра А1А2:
А1А2=
2) Угол между ребрами А1А2 и А1А4 равен углу φ между направляющими векторами этих ребер и . Косинус угла между двумя векторами = скалярному произведению этих векторов, деленному на произведение их модулей:
(2)
Координаты вектора с началом в точке А1(x1, y1, z1) и концом в точке А2(x2, y2, z2)
Скалярное произведение двух векторов с заданными координатами равны сумме произведений соответствующих координат, т.е если (а1, а2, а3), ( ), то их скалярное произведение
(4)
Применяя (4), найдем . Следовательно,
3) Угол между ребром А1А4 и гранью А1 А2 А3 равен углу φ между направляющим вектором данного ребра и нормальным вектором плоскости А1 А2 А3 .
Уравнение плоскости, проходящей через 3 данные точки А1(х1, y1, z1) и А2(х2, y2, z2), А3(х3, y3, z3) имеет вид
(5)
Подставим в (5) координаты точек А1 А2 А3, получим:
Разложим определитель по элементам I строки:
Сократив на (-12), получим уравнение плоскости А1 А2 А3:
2x – 4 – y + 1 - 2z = 0
2x – y - 2z – 3 = 0
Если уравнение плоскости α задано в каноническом виде Ax + By + Cz + Д = 0, то ее нормальный вектор α (А; В; С), т.е. нормальный вектор плоскости А1 А2 А3 имеет координаты (2; -1; -2). Синус угла α между вектором и плоскостью А1 А2 А3

 1(2 ; 4 ; 3 ; 2),
1(2 ; 4 ; 3 ; 2),  (18 ; 24 ; 13 ; 6). Показать, что векторы
(18 ; 24 ; 13 ; 6). Показать, что векторы  (1)
(1) (2)
(2) (3)
(3) 1,
1, 
 , то векторы линейно независимы и они образуют базис линейного пространства R4 . Для вычисления координат вектора
, то векторы линейно независимы и они образуют базис линейного пространства R4 . Для вычисления координат вектора  1,
1,  *
*
 ~
~ 




 1,
1,  1 -
1 -  3 + 3
3 + 3  4.
4. (1)
(1)
 и
и  . Косинус угла между двумя векторами = скалярному произведению этих векторов, деленному на произведение их модулей:
. Косинус угла между двумя векторами = скалярному произведению этих векторов, деленному на произведение их модулей: (2)
(2) с началом в точке А1(x1, y1, z1) и концом в точке А2(x2, y2, z2)
с началом в точке А1(x1, y1, z1) и концом в точке А2(x2, y2, z2) (3)
(3) (-2; 0; 4). Применяя (1), получим модули векторов
(-2; 0; 4). Применяя (1), получим модули векторов
 ), то их скалярное произведение
), то их скалярное произведение (4)
(4) . Следовательно,
. Следовательно,
 данного ребра и нормальным вектором
данного ребра и нормальным вектором  плоскости А1 А2 А3 .
плоскости А1 А2 А3 . (5)
(5)

 (6)
(6) по формуле (4):
по формуле (4): = -2 2 + 0 (-1) + 4 (-2) = - 4 – 8 = -12.
= -2 2 + 0 (-1) + 4 (-2) = - 4 – 8 = -12.