Под системой управления управляемой ракетой понимается совокупность устройств, определяющих положение ракеты и цели и обеспечивающих выработку команд управления и наведение ракеты на цель в течение всего времени полета до встречи с целью. Система управления обеспечивает также решение ряда других задач, предшествующих наведению ракеты на цель (управляет процессами подготовки пуска, самого пуска ракеты и др.)
Можно представить бесчисленное количество траекторий сближения ракеты с целью. Очевидно, из всего количества возможных траекторий при стрельбе по цели необходимо использовать одну, наиболее целесообразную с точки зрения тактических и технических соображений траекторию. Требуемая траектория сближения ракеты с целью задается уравнениями связи, определяющими движение ракеты в зависимости от координат и параметров движения цели. Характер этих связей обусловливается выбором метода наведения.
Следовательно, для сближения ракеты с целью, система управления в каждый момент времени должна не только иметь информацию о координатах и параметрах движения пели и ракеты, но и задавать характер связи между ними, определять меру нарушения этих связей и на основания этого вырабатывать команды управления, обеспечивающие движение ракеты по требуемой траектории.
Выработка команд управления, т. е. наведение зенитной управляемой ракеты на цель, как правило, осуществляется лишь по направлению в двух взаимно перпендикулярных плоскостях. Меру нарушения связи в каждой плоскости наведения принято называть параметром управления или сигналом рассогласования. Этот сигнал пропорционален отклонению регулируемой величины от требуемого значения, т. е. является ошибкой системы управления. Система управления, изменяя направление полета ракеты, все время должна работать на устранение этой ошибки и держать ее в таких пределах, при которых обеспечивается заданная точность сближения ракеты с целью.
Системами телеуправления называются такие системы, в которых требуемое движение ракеты определяется наземным пунктом наведения, непрерывно контролирующим параметры траектории цели и ракеты. В зависимости от места формирования команд (сигналов) управления рулями ракеты эти системы делят на системы наведения по лучу и командные системы телеуправления.
В системах наведения по лучу направление движения ракеты задается с помощью направленного излучения электромагнитных волн (радиоволн, лазерного излучения и др.). Луч модулируется таким образом, чтобы при отклонении ракеты от заданного направления ее бортовые устройства автоматически определяли сигналы рассогласования и вырабатывали соответствующие команды управления ракетой.
В командных системах телеуправления команды управления полетом ракеты вырабатываются на пункте наведения и по линии связи (линии телеуправления) передаются на борт ракеты. В зависимости от способа измерения координат цели и определения ее положения относительно ракеты командные системы телеуправления делятся на системы телеуправления первого вида и системы телеуправления второго вида. В системах первого вида измерение текущих координат цели осуществляется непосредственно наземным пунктом наведения, а в системах второго вида — бортовым координатором ракеты с последующей их передачей на пункт наведения. Выработка команд управления ракетой как в первом, так и во втором случае осуществляется наземным пунктом наведения.
Самонаведением называется автоматическое наведение ракеты на цель, основанное на использовании энергии, идущей от цели к ракете. Головка самонаведения ракеты (ГСН) автономно осуществляет сопровождение цели, определяет параметр рассогласования и формирует команды управления ракетой.
По виду энергии, которую излучает или отражает цель, системы самонаведения разделяются на радиолокационные и оптические (инфракрасные или тепловые, световые, лазерные и др.).
В зависимости от места расположения первичного источника энергии системы самонаведения могут быть пассивными, активными и полуактивными.
При пассивном самонаведении энергия, излучаемая или отражаемая целью, создается источниками самой цели или естественным облучателем цели (Солнцем, Луной). Следовательно, информация о координатах и параметрах движения цели может быть получена без специального облучения цели энергией какого-либо вида.
Система активного самонаведения характеризуется тем, что источник энергии, облучающий цель, устанавливается на ракете и для самонаведения ЗУР используется отраженная от цели энергия этого источника.
При полуактивном самонаведении цель облучается первичным источником энергии, расположенным вне цели и ракеты.
Методом наведения называется заданный закон сближения ракеты с целью, который в зависимости от координат и параметров движения цели определяет требуемое движение ракеты, обеспечивающее попадание ракеты в цель. Рассмотрим некоторые из существующих методов.
Положение ракеты относительно цели однозначно определяется расстоянием между ракетой и целью и направлением в пространстве линии ракета — цель. Если движение цели задано, то изменение этих координат во времени однозначно определяет траекторию полета ракеты (рис. 1).
Рис. 1. Углы и вектора системы ракета (Р) – цель (Ц).
Метод погони – направление на цель совпадает с направлением оси ракеты :
.
Метод наведения с постоянным углом упреждения :
.
Метод пропорционального сближения − скорость поворота вектора скорости ракеты пропорциональна угловой скорости поворота вектора ракета-цель:
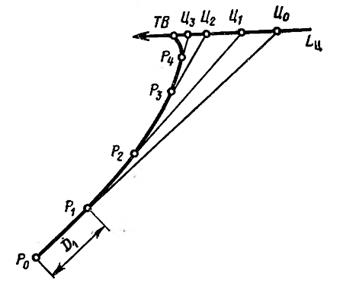
В данной работе для имитации АСУ ПТУР будет использован метод погони, для которого примерная траектория полета ракеты и цели показана на рис. 2.
Рис. 2. Траектория цели и ракеты при методе погони.


 совпадает с направлением оси ракеты
совпадает с направлением оси ракеты  :
: .
. :
: .
.