Монтажно-коммутационное пространство (МКП) предназначено для размещения конструктивных модулей и трассировки соединений между их контактами, которые должны быть соединены электрическими цепями. Форма и, естественно, математическая модель МКП зависят от уровня модуля, для которого в данный момент решаются задачи конструирования (базовый матричный кристалл, печатная плата, панель и т. д.). В дальнейшем ограничимся только плоским монтажно-коммутационным пространством, соответствующим конструктивному модулю типа печатной платы.
Без потери общности будем считать, что пространство имеет прямоугольную форму, так как введением областей, в которых запрещается размещение конструктивных модулей более низкого уровня или трассировки соединений, можно придать пространству произвольную форму. Так как МКП служит для решения двух задач — размещения модулей и трассировки, — то модели МКП, используемые для решения каждой задачи, будут иметь отличия. Рассмотрим эти модели подробнее.
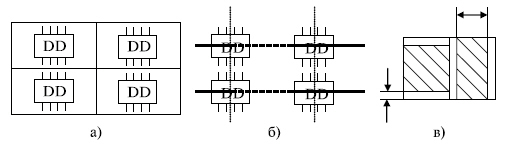
Наибольшее распространение для решения задач размещения конструктивных модулей в плоском МКП получили эвристические дискретные модели. Такие модели (будем их называть МКП1) строятся следующим образом (рис. 14.3а): МКП разбивается на элементарные площадки (дискреты), каждая из которых предназначена для размещения одного конструктивного модуля более низкого уровня, например микросхемы на печатной плате. Эти площадки в дальнейшем будем называть дискретами рабочего поля (ДРП).
Каждый дискрет в процессе решения задачи размещения может находиться в одном из следующих состояний: свободен для размещения, занят, имеет определенный вес, запрещающий размещение в нем модуля, и т. д. Такая модель МКП отличается простотой и удобством использования в эвристических алгоритмах размещения, однако она не является полностью формализованной.
Одной из разновидностей модели МКП1 является модель с ортогональной сеткой, в узлах которой могут размещаться модули низкого уровня (рис. 14.3б). Шаг сетки выбирается из условия возможности размещения модулей в соседних узлах сетки.
При размещении разногабаритных компонентов часто размер ДРП выбирают равным наибольшему общему делителю линейных размеров размещаемых модулей либо линейным размерам установочного места для наименьшего из модулей, если размеры всех модулей кратны. Заметим, что выбор шага дискретизации представляется весьма важным, так как при малых размерах ДРП увеличивается время решения задачи, зато повышается плотность заполнения МКП модулями низшего уровня.
Рис. 14.3. Дискретные модели МКП
Аналогичные дискретные модели используются и для решения задач трассировки. В этом случае дискрет является квадратом со сторонами, равными ширине проводника плюс зазор между ними (рис. 14.3в). При этом считается, что проводник из каждого дискрета может быть проведен только в соседний ДРП.
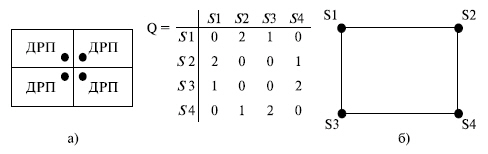
Наибольшее распространение для решения задач размещения получили модели МКП в виде взвешенного графа VG(S, V), которые будем обозначать МКП2. Взвешенный граф VG представляет собой симметрический граф, в котором множество вершин S соответствует множеству установочных позиций в коммутационном пространстве для модулей низшего уровня, а множество ветвей интерпретирует множество связей между соответствующими установочными позициями. Каждой ветви графа uij присваивается вес pij — он равен числу условных единиц расстояния между центрами установочных позиций Si и Sj, интерпретируемых вершинами, которые инцидентны данной ветви. Вес ветви pij определяется в зависимости от метрики пространства по одной из формул (14.1, 14.2).
Для описания взвешенного графа VG удобно использовать матрицу смежностей Q, строки и столбцы которой соответствуют вершинам графа, т. е. множеству установочных позиций в МКП, а элементы gij равны весу ветви, инцидентной i-й и j-й вершинам графа. Элементы, лежащие на главной диагонали матрицы смежностей Q, принимаются равными нулю. Так, для МКП, показанного на рис. 14.3а, модель в виде взвешенного графа при ортогональной матрице смежности Q имеет вид как на рис. 14.4. Для решения задач размещения применяются и другие графовые модели.
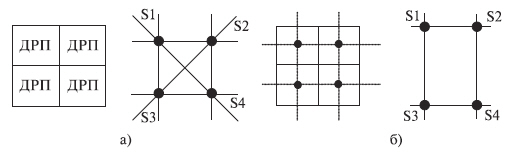
Большими возможностями для формализации процесса трассировки обладают комбинированные дискретно-графовые модели МКПЗ. В этом случае МКП моделируется симметрическим графом G(S, V), в котором каждому ДРП ставится в соответствие вершина графа. Вершины Si, и Sj соединяются ветвью, если они соответствуют соседним дискретам, через которые может проходить проводник. Трассы проводников могут проходить только по ветвям графа, а длина трасс определяется в соответствии с выбранной метрикой пространства. На рис. 14.5а показаны модели МКП2 для трассировки по ортогональным направлениям и при допущении трассировки под углом в 45° (трассировка по шести направлениям).
Симметрический граф G(S, V) с множеством вершин S и множеством ветвей V может быть описан в ЭВМ матрицей инциденций А, элемент которой ai,j = 1, если вершина Si инцидентна ветви ui,j, и ai,j = 0 — в противном случае. Для графа, показанного на рис. 14.5а при допущении трассировки по восьми направлениям матрица инциденций имеет вид (рис. 14.5).
Модель МКПЗ очень широко распространена и позволяет при трассировке получить все множество кратчайших путей в отличие от МКП1, в которой обычно получают лишь один из возможных путей из этого множества. Кроме того, вводя вес для вершин и ветвей графа, можно регулировать скорость распространения числовой волны по определенным направлениям в волновых алгоритмах трассировки засчет введения соответствующих задержек.
Рис. 14.4. Графовые модели МКП для решения задачи размещения
Аналогична МКПЗ и графовая модель пространства МКП4, также используемая для решения задач трассировки. Модель МКП4 представляет симметрический граф G(S,V), вершины которого Si соответствуют узлам координатной сетки, нанесенной на плоское МКП, а ветви графа ui,j — отрезкам координатной сетки, соединяющим две соседние точки (рис. 14.5б). Особенностью модели МКП4 по сравнению с МКПЗ является интерпретация ветви графа G(S, V) как элементарного отрезка проводника, который может быть проложен в этом месте МКП. По своим возможностям модель МКП4 эквивалентна МКПЗ.
Для моделирования коммутационного пространства при решении задач трассировки можно использовать модели в виде мультиграфа, т. е. симметрического графа, у которого существует хотя бы одна пара вершин, соединенных несколькими ветвями. Ветви, соединяющие одну и ту же пару вершин, называют кратными, а их максимальное число — мультичислом графа.
Одна из таких моделей МКП5 представляет мультиграф MG(S, V), в котором множество вершин графа S соответствует множеству установочных позиций в коммутационном пространстве для модулей низшего уровня. Множество ветвей V соответствует множеству взаимно независимых непосредственных переходов между установочными позициями, т. е. множеству областей, допускающих трассировку соединений между этими позициями без пересечений. Мультиграф MG(S, V) может быть описан с помощью матрицы смежности Q, в которой, как и для взвешенного графа, элементы gi,j, лежащие на главной диагонали, принимаются равными нулю, а внедиагональные элементы gi,j равны числу кратных ветвей, инцидентных i-й и j-й вершинам графа. Для примера на рис. 14.5 показаны фрагмент коммутационного пространства с установочными позициями и его модель в виде мультиграфа при допущении трассировки без пересечений трех проводников между соседними позициями.
Еще более общей моделью МКП в виде мультиграфа, используемой для решения задач трассировки, является модель МКП6, в которой вершины графа соответствуют макродискретам, на которые разбивается МКП. Ребра мультиграфа соединяют соседние вершины, причем количество кратных ветвей определяется тем, сколько проводников может пройти через границы соседних дискретов.
Рис. 14.5. Графовые модели МКП для решения задачи трассировки
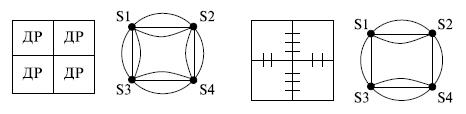
Расстояние определяется как количество макродискретов, пройденных проводником при трассировке. Пример фрагмента МКП с макродискретами, через границы которых допускается прохождение трех и двух проводников, и соответствующий ему мультиграф показаны на рис. 14.6.
Рис. 14.6. Модели МКП в виде мультиграфа
u12
u13
u14
u23
u24
u34
A=
S1
S2
S3
S4
Матрица смежности такого мультиграфа имеет вид
S1
S2
S3
S4
Q=
S1
S2
S3
S4
Модель МКП6 предполагает проведение трассировки проводников в два этапа: на первом определяется путь с точностью до вершины мультиграфа (макродискрета), на втором — путь конкретизируется с точностью до ветви. Это позволяет на первом этапе выбрать наилучшее взаимное расположение трасс, а на втором провести собственно трассировку, что уменьшает зависимость количества реализованных в коммутационном пространстве трасс от очередности трассировки.
Контрольные вопросы и упражнения
Что называется математической моделью (ММ)?
Что называют внутренними, внешними и выходными параметрами ММ?
Что называют фазовыми переменными?
Что называют базисным вектором?
Покажите общий вид системы уравнений для любой РЭС и дайте пояснения.
Что включается в анализ ММ?
Что представляют собой компонентные уравнения и компонентная модель?
Какие требования предъявляют к ММ объекта?
На какие группы делятся макромодели?
Для чего предназначена факторная модель?
Для чего предназначена фазовая модель?
Как получают физическую модель?
Как получают формальную модель?
В чем различие статической и динамической моделей?
В чем заключается модульный принцип конструирования?
Приведите иерархию конструктивных модулей.
15. Лекция: Разработка математических моделей при проектировании технологии
|| Настройки || Модерация
15.1. Методы получения моделей элементов
Получение моделей элементов (моделирование элементов) в общем случае — процедура неформализованная. Основные решения, касающиеся выбора вида математических соотношений, характера используемых переменных и параметров, принимает проектировщик. В то же время такие операции, как расчет численных значений параметров модели, определение областей адекватности и др., алгоритмизированы и решаются на ЭВМ. Поэтому моделирование элементов обычно выполняется специалистами конкретных технических областей с помощью традиционных средств экспериментальных исследований и средств САПР.
Методы получения функциональных моделей элементов делят на теоретические и экспериментальные. Теоретические методы основаны на изучении физических закономерностей, протекающих в объекте процессов. Далее происходит определение соответствующего этим закономерностям математического описания, обоснование и принятие упрощающих предположений, выполнение необходимых выкладок и приведение результата к принятой форме представления модели. Экспериментальные методы основаны на использовании внешних проявлений свойств объекта, фиксируемых во время эксплуатации однотипных объектов или при проведении целенаправленных экспериментов.
Несмотря на эвристический характер многих операций моделирования, имеется ряд положений и приемов, общих для получения моделей различных объектов. Достаточно общий характер имеют методика макромоделирования, математические методы планирования экспериментов, а также алгоритмы формализуемых операций расчета численных значений параметров и определения областей адекватности.
15.1.1. Методика макромоделирования
Применение методики состоит из следующих этапов:
Определение тех свойств объекта, которые должны отражаться моделью (устанавливаются требования к степени универсальности будущей модели).
Сбор априорной информации о свойствах моделируемого объекта. Примерами собираемых сведений могут служить справочные данные, математические модели и результаты эксплуатации существующих аналогичных объектов и т. п. Назовем эту информацию производственной статистикой.
Получение общего вида уравнений модели (структуры модели). Этот этап в случае теоретических методов включает выполнение всех присущих этим методам операций, перечисленных выше. Часто проектировщику модели удобнее оперировать не уравнениями, а эквивалентными схемами, с помощью которых инженеру проще устанавливать физический смысл различных элементов математической модели.
Определение численных значений параметров модели. Возможны следующие приемы выполнения этого этапа:
использование специфических расчетных соотношений с учетом собранных на этапе 2 сведений;
решение экстремальной задачи, в которой в качестве целевой функции выбирается степень совпадения известных значений выходных параметров объекта с результатами использования модели, а управляемыми параметрами являются параметры модели;
проведение экспериментов и обработка полученных результатов.
Оценка точности полученной модели и определение области ее адекватности. При неудовлетворительной точности оценок выполняют итерационное приближение к желаемому результату повторением этапов 3-5.
Представление полученной модели в форме, принятой в используемой библиотеке моделей.
15.1.2. Методы планирования экспериментов
Для целей моделирования используют пассивные и активные эксперименты. В пассивных экспериментах нет возможности выбирать условия опыта по своему усмотрению и устанавливать значения факторов на желаемом уровне. В активных экспериментах опыты проводятся по заранее разработанному плану, выражающему количество опытов и значения факторов в каждом опыте [28, 31].
Выбор вида зависимости выходного параметра макромодели у (в общем случае рассматривается вектор выходных параметров Y) от внешних параметров qk, объединенных в вектор факторов Q, осуществляется проектировщиком. Чаще всего в методах планирования эксперимента используются модели линейные
(15.1)
или квадратичные
(15.2)
где А — вектор — строка коэффициентов (параметров) модели; В — вектор, включающий факторы qk, те или иные произведения из двух, трех или более факторов и, возможно, также квадраты факторов qk; k = 1, ..., р; р — число факторов.
Число опытов N, как правило, должно превышать число определяемых параметров вектора А. Параметры рассчитывают по методу наименьших квадратов, т. е. из условия минимизации суммы квадратов отклонений значений , определенных по уравнению модели (15.1), и измеренных значений :
(15.3)
где — номер опыта.
В зависимости от способов планирования преимущества активных экспериментов перед пассивными могут выражаться в получении оптимального положения области адекватности, в ее увеличенном объеме, в упрощении оценок точности и т. п.




 , определенных по уравнению модели (15.1), и измеренных значений
, определенных по уравнению модели (15.1), и измеренных значений  :
:
 — номер опыта.
— номер опыта.