СХЕМЫ ВЫПРЯМЛЕНИЯ И ПАРАМЕТРИЧЕСКИЕ СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
Методические указания к работе
Теоретическая часть
Схемы выпрямления относятся к классу нелинейных преобразователей и
делятся на:
-однофазные и многофазные,
-однополупериодные и двухполупериодные,
-управляемые и неуправляемые.
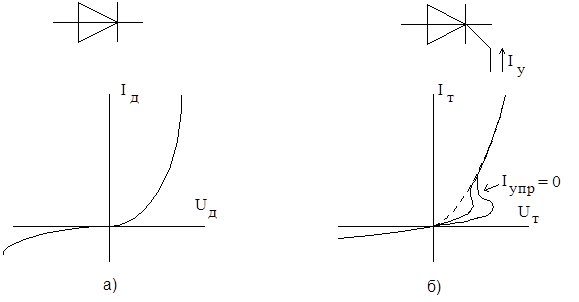
Схемы строятся на основе нелинейных элементов: диодов и тиристоров, вольтамперные характеристики которых показаны на рис.1. и используют их свойства пропускать ток в одном направлении и не пропускать его в другом направлении.
Рис.1. Вольт-амперные характеристики: а) диодов и б) тиристоров.
В схемах неуправляемых выпрямителей используются диоды в схемах управляемых выпрямителей – тиристоры.
Простейшей однополупериодной однофазной схемой неуправляемого выпрямителя является схема рис.2 а, представляющая собой диод, работающий на нагрузку. Недостатком ее является неиспользование источника сигнала в один из полупериодов входного напряжения, в связи с чем данная схема применяется очень редко.
Более широкое распространение получили двухполупериодные однофазные схемы (риc. 2 б, в) первая из которых (рис.2 б) представляет собой совокупность двух схем (рис. 2 а), вторая называется мостовой.
Рис.2. Однофазные схемы выпрямления
В мостовой схеме, при положительной полуволне напряжения открыты диоды , , путь тока показан сплошными стрелками, при отрицательной полуволне напряжения открыты диоды , , путь тока показан пунктирными стрелками.
Недостатком рассмотренных однофазныхсхем является большая пульсация напряжения на выходе (от 0 до ) .
Уменьшение пульсации напряжения на выходе может быть достигнуто путем использования схем сглаживания или многофазных схем выпрямления.
Многофазных схемы выпрямления (как правило, используются трехфазные схемы) представляют собой сочетание нескольких однофазных схем выпрямления, питающихся от разных источников питания и работающих на общую нагрузку.
На рис.3 а показана однополупериодная трехфазная схема, питающаяся от симметричной системы напряжений , , .На сопротивлении нагрузки в каждый момент времени выделяется наибольшее из трех выпрямленных напряжений, в результате чего пульсация напряжения составляет от до 0,5 .
Рис.3. Трехфазные схемы выпрямления
а) однополупериодная; б) двухполупериодная;
в) с использованием схемы расщепления однофазного напряжения
На рис.3 б показана трехфазная двухполупериодная схема (схема Ларионова). В данной схеме в каждый момент времени открыта только одна пара диодов, например, , ; , ; , и т. д. и на нагрузке выделяется наибольшее по абсолютному значению из трех выходных линейных напряжений , , .
Пульсация напряженияв схеме составляет от до 0,86 .
Схемы трехфазного выпрямления нашли широкое применение для преобразования однофазного переменного синусоидального сигнала в сигнал одной полярности с малой пульсацией. С этой целью однофазный сигнал расщепляется на трехфазный (с помощью схем расщепления) и затем подается на трехфазную схему выпрямления (рис.3в).
Управляемые выпрямители находят широкое применение в тех случаях, когда необходимо регулировать величину постоянного тока в нагрузке (например, в схемах возбуждения генераторов и двигателей).
Принцип действия простейшего управляемого выпрямителя заключается в следующем (рис.4 а).
При отсутствии управляющего сигнала ( ) тиристор закрыт и напряжение на нагрузке равно нулю. При подаче на управляющий электрод положительного напряжения и наличии на аноде положительного напряжения тиристор открывается и напряжение полностью прикладывается к нагрузке (падение напряжения на тиристоре незначительно). При изменении знака входного напряжения тиристор закрывается и ток в нагрузке снова становится равным нулю. Подавая в цепь управления импульсы, синхронные по частоте с входным напряжением, получим в нагрузке ток, форма и величина которого будет определяться моментом приложения импульсов управляющего напряжения (рис.4 б).
Реальные схемы управляемых выпрямителей на тиристорах более сложны. На рис. 5 представлена схема однофазного двухполупериодного выпрямителя.
Рис. 5. Управляемый выпрямитель на тиристорах
Управление тиристорами осуществляется попарно ( , ,и , ) от специального генератора импульсов (ГИ), синхронизированного по частоте с входным напряжением.
При использовании выпрямителей довольно часто требуется получить выходное напряжение с малой пульсацией. Пульсация характеризуется коэффициентом пульсации q , определяемым отношением амплитуды переменной составляющей, равной половине разности наибольшего и наименьшего значений напряжения, к постоянной составляющей
Требованию малой пульсации удовлетворяют в выходном напряжении трехфазные схемы выпрямления. В случае применения однофазных схем необходимо для уменьшения пульсации напряжения включать на выходе схем выпрямления сглаживающие частотные фильтры, которые строятся на основе реактивных элементов (емкостей и индуктивностей).
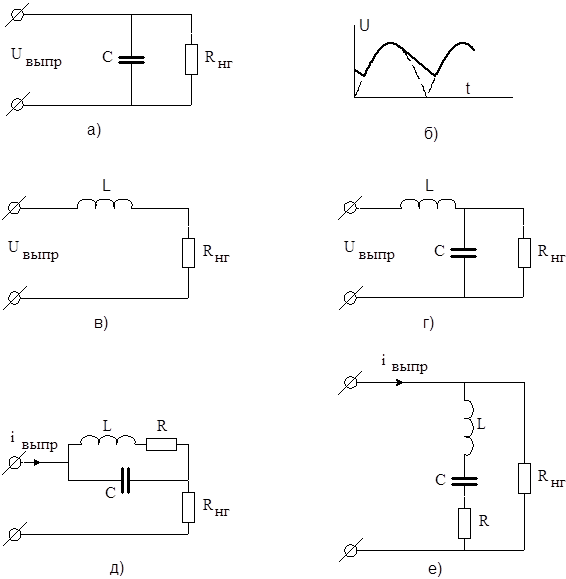
На рис.6 приведены схемы наиболее распространенных фильтров. Схемы рис.6 а, в, г используются, еслисхема выпрямителя питается от источника напряжения, схемы рис.6 д, е - от источника тока.
Рис.6. Схема сглаживания
а,б,в,г — при питании от источника напряжения
д,е — при питании от источника тока
При питании от источника тока уменьшение пульсации напряжения происходят вследствие шунтирования нагрузки сопротивлением фильтра (малым на высоких частотах для схемы рис.6 е).
При питании от источника напряжения в схемах рис.6 а, в, г, эффект фильтрации высших гармоник получается за счет того, что конденсатор С и дроссель L поддерживают течение некоторого промежутка времени ток в нагрузке. Например, в схеме рис.6а, при возрастании напряжения конденсатор быстро заряжается. При уменьшении напряжения (рис.6 б) и достижении некоторого значения, ниже которого выпрямленное напряжение уменьшается быстрее, чем разряжается конденсатор С на сопротивление нагрузки, диоды выпрямительного моста закрываются и напряжение на нагрузке изменяется по кривой разряда емкости С, которая лежит выше кривой выпрямленного напряжения.
В схеме рис.6 д уменьшение пульсации достигается за счет большого сопротивления фильтра на частоте 100 Гц.
Полупроводниковые стабилизаторы напряжения предназначены для поддержания напряжения на нагрузке неизменным в определенных пределах..
К стабилизаторам предъявляется основное требование, состоящее в том, чтобы нестабильность выходного напряжения укладывалась в заданные пределы, как при изменениях нагрузочного тока, так и при изменениях питающего напряжения.
Основными параметрами, значения которых нормируется для стабилизаторов напряжения, являются:
1) коэффициент стабилизации - отношение изменения входного (питающего) напряжения к изменению выходного напряжения при постоянной нагрузке ( R Н=const )
(1)
2) выходное сопротивление - отношение изменения выходного напряжения к изменению тока нагрузки при постоянном входном напряжении ( U ВХ = const ).
(2)
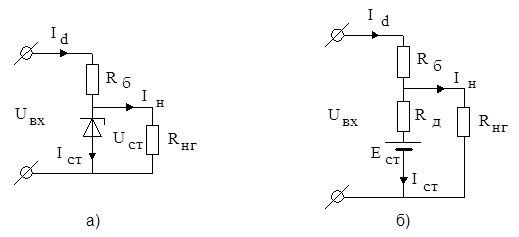
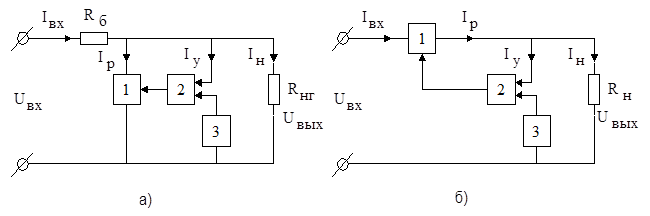
Известны стабилизаторы напряжения двух видов: параметрические и компенсационные. В параметрическом стабилизаторе (рис.7) используется стабилитрон, напряжение которого является одновременно напряжением нагрузки. У компенсационных стабилизаторов выходное напряжение сравнивается с эталонным и при возникновении разности происходит корректирование выходного напряжения (компенсация его изменения). В простейших маломощных схемах чаще всего применяются параметрические стабилизаторы. Компенсационные стабилизаторы (рис.8)применяют в тех случаях, когда предъявляются высокие требования к стабильности напряжения и требуется значительная мощность.
Рис.7. Принципиальная (а) и эквивалентная (б) схемы
В стабилизаторах параметрического типа стабилитрон применяется в сочетании с балластным сопротивлением R Б , включенным последовательно в цепь питания (рис.7). Через это сопротивление проходит нагрузочный ток IН и ток стабилитрона I СТ .
(3)
так как
, (4)
то при изменении нагрузочного тока стабилизация напряжения на нагрузке осуществляется благодаря перераспределению тока Id между нагрузочной цепью и стабилитроном. С ростом тока IН ток IСТ уменьшается и наоборот, при уменьшении I Н ток I СТ увеличивается.
Расчет параметрического стабилизатора сводится к определению RБ при заданных пределах изменения входного напряжения, напряжении стабилизации, выбранном типе стабилитрона:
(5)
Неравенство (5) может быть выполнено, если
(6)
В приведенных формулах:
- ток нагрузки,
, - максимальное и минимальное значение входного напряжения
- напряжение стабилизации стабилитрона,
, - паспортные значения максимального и минимального токов стабилизации стабилитрона.
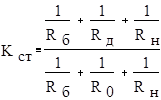
Из (1), подставляя (3) и (4) и учитывая, что
,
получим
(7)
где
- дифференциальное сопротивление стабилитрона,
- сопротивление стабилитрона постоянному току,
- среднее значение тока стабилизации.
Выходное сопротивление стабилитрона согласно(2) будет определяться выражением:
(8)
Коэффициент полезного действия параметрического стабилизатора определяется по формуле
Малый коэффициент стабилизации и высокое значение выходного сопротивления параметрического стабилизатора ограничивают возможности его применения.


 ,
,  , путь тока показан сплошными стрелками, при отрицательной полуволне напряжения
, путь тока показан сплошными стрелками, при отрицательной полуволне напряжения  открыты диоды
открыты диоды  ,
,  , путь тока показан пунктирными стрелками.
, путь тока показан пунктирными стрелками. ) .
) .
 На рис.3 а показана однополупериодная трехфазная схема, питающаяся от симметричной системы напряжений
На рис.3 а показана однополупериодная трехфазная схема, питающаяся от симметричной системы напряжений  ,
,  ,
,  .На сопротивлении нагрузки в каждый момент времени выделяется наибольшее из трех выпрямленных напряжений, в результате чего пульсация напряжения составляет от
.На сопротивлении нагрузки в каждый момент времени выделяется наибольшее из трех выпрямленных напряжений, в результате чего пульсация напряжения составляет от  ;
;  ;
;  ,
,  ,
,  .
.
 ) тиристор закрыт и напряжение на нагрузке равно нулю. При подаче на управляющий электрод положительного напряжения и наличии на аноде положительного напряжения тиристор открывается и напряжение
) тиристор закрыт и напряжение на нагрузке равно нулю. При подаче на управляющий электрод положительного напряжения и наличии на аноде положительного напряжения тиристор открывается и напряжение 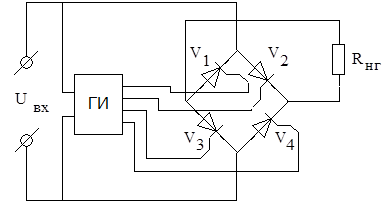

 (1)
(1) (2)
(2)
 (3)
(3) ,
,  (4)
(4) (5)
(5) (6)
(6) - ток нагрузки,
- ток нагрузки, ,
,  - максимальное и минимальное значение входного напряжения
- максимальное и минимальное значение входного напряжения - напряжение стабилизации стабилитрона,
- напряжение стабилизации стабилитрона, ,
,  - паспортные значения максимального и минимального токов стабилизации стабилитрона.
- паспортные значения максимального и минимального токов стабилизации стабилитрона. ,
, 
 (7)
(7) - дифференциальное сопротивление стабилитрона,
- дифференциальное сопротивление стабилитрона, - сопротивление стабилитрона постоянному току,
- сопротивление стабилитрона постоянному току,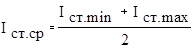 - среднее значение тока стабилизации.
- среднее значение тока стабилизации.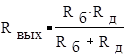

 (8)
(8)