Во многих прикладных задачах изучаются системы связей между различными объектами. Объекты отмечаются точками, а связи между вершинами отмечаются отрезками (стрелками) между соответствующими точками.
Такие системы и образуют графы. Точки – вершины графа. Отрезки – ребра графа.
Граф может изображать сеть улиц в городе: вершины графа – перекрестки, а дуги – улицы с разрешенным направлением движения (улицы могут быть с односторонним и двусторонним движением).
В виде графов можно представить блок-схемы программ (вершины – блоки, а дуги – разрешенные переходы от одного блока к другому), электрические цепи, географические карты, молекулы химических соединений и др.
Определение: Введем в рассмотрение два конечных множества.
V – непустое множество объектов V={v1, …, v n}
X – некоторый набор пар элементов из V вида x=(v, w) (которые связаны между собой)
Графом – называется алгебраическая система G= (V, X), где V – множество вершин графа, а X – множество ребер графа.
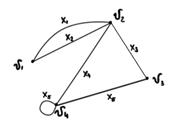
Определение: Ребра вида (v, v) называются петлями.
Определение: Одинаковые ребра, т.е. соединяющие одни и те же вершины, называются кратными(или параллельными) ребрами.
Определение: Количество кратных ребер (u, v) называется кратностью ребра (u, v).
Определение: Псевдограф – граф с кратными ребрами и петлями.
Определение: Мультиграф –псевдограф без петель.
Определение: Вершины, не принадлежащие ни одному ребру, называются изолированными.
Определение: Если в графе G указано направление ребер, то граф называется ориентированным.
Для ориентированных графов будем использовать букву Д.
Ребра ориентированного графа называются дугами.
Определение: Если направление ребер не указано, то граф называется неориентированным (н-графом) или просто графом.
Если некоторому графу поставлена соответствующая геометрическая конфигурация, то данная конфигурация называется изображением (или реализацией) графа.
Определение: Если x= (u, v) – ребро графа, то вершины u и v называются концами ребра x.
Определение: Если x= (u, v) – дуга орграфа, то u называется началом, а v концом дуги x.
В этом случае говорят: что дуга x исходит из вершины u и заходит в вершину v.
Определение: Вершины u, v графа G=(V, X) (орграфа Д=(V, X)) называются смежными, если (u, v) Х, т. е. вершины u, v называются смежными, если существует ребро (дуга), соединяющая их.
Определение: Два ребра называются смежными, если они имеют общую вершину.
Определение: Если вершина v является концом (началом или концом) ребра (дуги) x, то говорят, что вершина v и ребро (дуга) xинциденты.
Определение: Вершина, инцидентная ровно одному ребру, и само ребро называются концевыми (иливисячими).
Определение: Степеньювершины vграфа G называется число v), равное числу ребер, инцидентных вершине v.
У изолированной вершины v) = 0.
У висячей вершины v) = 1.
Определение: Полустепеньюисхода вершины v в орграфе Дназывается число v), равное количеству дуг, исходящих из вершины v.
Определение: Полустепеньюзахода вершины v в орграфе Д называется число v), равное количеству дуг, заходящих в вершину v.
Кол-во вершин и ребер в графе G будем обозначать соответственно n(G) и m(G). Кол-во вершин и дуг в орграфе Д будем обозначать соответственно n(Д) и m(Д).
Утверждение 1. Для любого псевдографа G выполняется равенство:
.
Утверждение 2. Для любого ориентированного псевдографа Д выполняется равенство:
.
Определение: Подграфом графа G называется граф, все вершины и рёбра которого содержатся среди вершин и ребер графа G.
Определение: Подграфназывается собственным, если он отличен от самого графа.
Определение: Объединением графов G1=(V1, X1) и G2=(V2, X2) называется граф G=G1+G2=(V1 V2, X1 X2).
Определение: Пересечением графов G1=(V1, X1) и G2=(V2, X2), где V1 V2 0, называется граф G=G1 G2=(V1 V2, X1 X2).
Определение: Произведением графов G1=(V1, X1) и G2=(V2, X2) называется граф G=G1×G2=(V, X), для которого V=V1×V2 – декартово произведение множеств вершин исходных графов, а множество ребер X определяется следующим образом: вершины (u1, u 2) и (v1, v2) смежны в графе G тогда и только тогда, когда или u1=v1, а u2 и v2 смежны в графе G2, или u2=v2, а u1 и v1 смежны в графе G1.
Часто бывает важно определить, какие графы считаются различными, а какие не различаются. Обычно это связывают с понятием изоморфизма графов.
Определение: Два графа G1=(V1, X1) и G2=(V2, X2) называются изоморфными, если существуют взаимно однозначные отображения f и g, такие, что f: V1 ® V2 и g: X1 ® X2, сохраняющие инцидентность.
Обозначаются: G1 ~ G2.
Во многих случаях можно рассматривать графы с точностью до изоморфизма, т.е. не различать изоморфные графы. Однако, если какие-то вершины или рёбра графа обладают различной индивидуальностью, например, они занумерованы или им сопоставлены какие-либо численные характеристики (вес ребра, длина ребра и др.), то естественно при сравнении двух графов эту индивидуальность учитывать.
G1~G2~G3
Определение: Последовательность вершин и ребер (дуг) графа G (орграфа Д) v1x1v2x2v3…xkvk+1(k 1) называется маршрутом (путём) из вершины v1 в вершину vk+1.
Определение: Длина пути (маршрута) равна количеству дуг (ребер) в последовательности (=k).
Определение: Вершина v1называется началоммаршрута (пути), а vk+1 – концом. Остальные вершины называются внутренними.
Маршрут (путь) рассматривается как непрерывная траектория движения по вершинам и рёбрам графа.
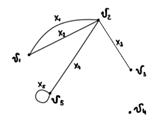
Пример:v1x1v2x3v3x6v4 – маршрут из v1 в v4 длиной 3.
Определение: Незамкнутый маршрут (путь), в котором все рёбра (дуги) попарно различны, называется цепью.
Определение: Цепь, в которой все вершины попарно различны, называется простойцепью.
Определение: Замкнутый маршрут (путь), в котором все ребра (дуги) попарно различны, называется циклом (контуром).
Определение: Цикл (контур), в котором все вершины попарно различны, называется простымциклом (простымконтуром).
Определение: Неориентированный граф без циклов называется ациклическим.
Определение: Орграф, не имеющий контуров, называется бесконтурным.
Определение: Вершина v называется достижимой из вершины u, если существует маршрут, связывающий вершины u и v.
Способы задания графов. Матричное задание графов.
Существует несколько способов задания графов:
1. Перечисление (список) ребер графа и вершин графа.
Определение: Матрицейсмежностиграфа G называется квадратная матрица A(G)=[aij] порядка n, у которой
Определение: Матрицейинцидентностиграфа G называется матрица B(G)=[вij] размерности n x m, у которой
Замечание: Матрицу смежности можно определить и для псевдографов. Тогда в случае ориентированного (неориентированного) псевдографа aij=k , где k – кратность дуги (ребра) (vi,vj) в этом псевдографе. Определение матрицы инцидентности без изменений переносится и на произвольные мультиграфы (ориентированные и неориентированные) и на неориентированные псевдографы; только в случае петли (vi, vi) ставим в матрице инцидентности α.
Матрица A(G) является симметричной для любого неориентированного графа G.
Матрица A(Д), где Д – орграф, в общем случае симметричной не является.
По матрице смежности графа (орграфа) всегда можно определить ребра графа (дуги орграфа) как пары инцидентных им вершин, а для псевдографов, кроме того, и кратность ребер (дуг).
Однако, если рёбра (дуги) были пронумерованы, то восстановить их номера по матрице смежности невозможно.
В этом случае более информативной оказывается матрица инцидентности.


 Х, т. е. вершины u, v называются смежными, если существует ребро (дуга), соединяющая их.
Х, т. е. вершины u, v называются смежными, если существует ребро (дуга), соединяющая их. v), равное числу ребер, инцидентных вершине v.
v), равное числу ребер, инцидентных вершине v. v), равное количеству дуг, исходящих из вершины v.
v), равное количеству дуг, исходящих из вершины v. v), равное количеству дуг, заходящих в вершину v.
v), равное количеству дуг, заходящих в вершину v. .
. .
. V2, X1
V2, X1  V2
V2  0, называется граф G=G1
0, называется граф G=G1  G2=(V1
G2=(V1 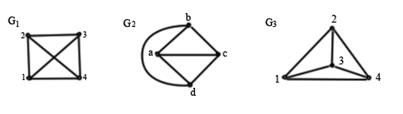 Во многих случаях можно рассматривать графы с точностью до изоморфизма, т.е. не различать изоморфные графы. Однако, если какие-то вершины или рёбра графа обладают различной индивидуальностью, например, они занумерованы или им сопоставлены какие-либо численные характеристики (вес ребра, длина ребра и др.), то естественно при сравнении двух графов эту индивидуальность учитывать.
Во многих случаях можно рассматривать графы с точностью до изоморфизма, т.е. не различать изоморфные графы. Однако, если какие-то вершины или рёбра графа обладают различной индивидуальностью, например, они занумерованы или им сопоставлены какие-либо численные характеристики (вес ребра, длина ребра и др.), то естественно при сравнении двух графов эту индивидуальность учитывать. 1) называется маршрутом (путём) из вершины v1 в вершину vk+1.
1) называется маршрутом (путём) из вершины v1 в вершину vk+1.