Математическое описание ДПТ НВ и его Simulink-модель
Двигатель постоянного тока независимого возбуждения (рис. 4.7), описывается следующей системой дифференциальных и алгебраических уравнений в абсолютных единицах:
,
(1)
,
(2)
,
(3)
,
(4)
где
u - напряжение на якорной обмотке двигателя,
e - электродвижущая сила (ЭДС) якоря,
i - ток якоря,
Ф - поток, создаваемый обмоткой возбуждения,
M - электромагнитный момент двигателя,
MС- момент сопротивления движению,
- скорость вращения вала двигателя,
R - активное сопротивление якорной цепи,
L - индуктивность якорной цепи,
J - суммарный момент инерции якоря и нагрузки,
С - коэффициент связи между скоростью и ЭДС,
СМ - коэффициент связи между током якоря и электромагнитным моментом.
Рис. 4.7
С точки зрения будущей модели, входными воздействиями являются напряжения якоря u и момент сопротивления движению MС , выходными переменными - электромагнитный момент двигателя M и скорость вращения вала двигателя , а переменными состояния - переменные стоящие под знаком производной (ток якоря i и скорость вращения вала двигателя ). Остальные переменные, входящие в состав уравнений (1) - (4) являются параметрами, численные значения которых, необходимо будет задавать при проведении расчетов.
Для создания модели, так же как и в случае насыщающегося реактора, сначала необходимо получить передаточные функции, применив к дифференциальным уравнениям, преобразование Лапласа. Дифференциальное уравнение (1) даст ПФ, связывающую ток якоря и падение напряжения на якоре:
.
(5)
Уравнение (2) дает передаточную функцию, связывающую динамический момент и скорость вращения вала двигателя:
.
(6)
Уравнения (3) и (4) остаются без изменений.
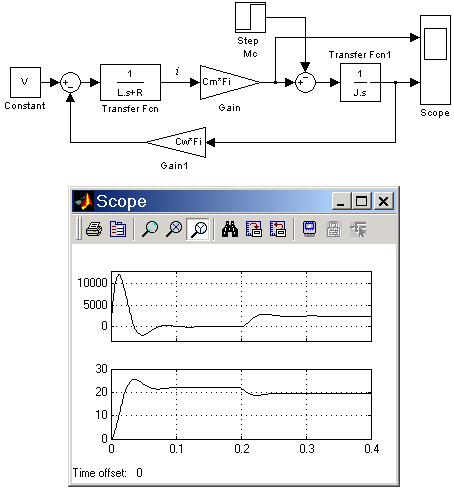
В итоге, используя уравнения (3)-(6) не трудно составить Simulink-модель двигателя. Схема модели, а также графики электромагнитного момента и скорости при прямом пуске двигателя показаны на рис. 4.8. В примере приняты следующие значения параметров двигателя (в единицах Си): L=0.001, R=0.1, J=10, Cm=10, Cw=10, U=220, Fi=1. Наброс нагрузки производится в момент времени 0.2с, величина момента нагрузки равна 2500Нм.
Рис. 4.8
Скачать пример (Dpt_Simulink_1.zip)
SPS модель двигателя на базе источника тока
Для создания SPS модели двигателя на базе управляемого источника тока также можно воспользоваться общей схемой, приведенной на рис. 4.1. Выход датчика напряжения должен быть подключен к первому входу сумматора, а на управляющий вход источника тока должен быть подан сигнал пропорциональный току якоря двигателя (выходной сигнал блока Transfer Fcn на рис. 4.8). Схема блока SPS-модели двигателя, полная схема модели, а также графики тока якоря и скорости вращения вала показаны на рис. 4.9.
Рис.4.9
При работе с моделью двигателя следует иметь в виду, что она не является электротехнической в чистом виде, поскольку выходные сигналы электромагнитного момента и скорости являются обычными однонаправленными безразмерными сигналами Simulink. Графики переменных, представленные на рис. 4.9 полностью повторяют соответствующие графики обычной Simulink модели двигателя, показанные на рис. 4.8.
Скачать пример (Dpt_Powersys_1.zip)
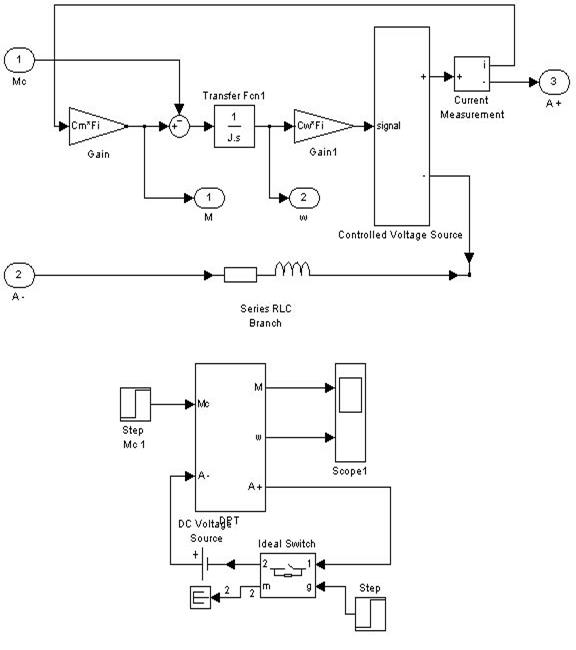
SPS модель двигателя на базе источника напряжения
Модель двигателя постоянного тока можно создать также и на базе управляемого источника напряжения и датчика тока. Поскольку на схеме замещения цепи якоря двигателя (рис. 4.7) присутствуют индуктивность и резистор, то эти элементы можно исключить из Simulink-модели, исключив соответственно и уравнение (1), а также передаточную функцию (5). Сами резистор и индуктивность можно добавить к модели с помощью стандартного блока Series RLC Branch. В результате будет получена комбинированная модель двигателя (рис. 4.10). На рис. 4.10 показана и полная схема модели с подключенным источником питания двигателя (DC Voltage Source). Источник питания подключен через ключ Ideal Switch, который замыкается через небольшой промежуток времени с начала расчета. Наличие такого ключа обусловлено особенностями расчета начальных условий в моделях SimPowerSystem, а именно начальные условия для элемента Series RLC Branch (ток в элементе) задаются как для установившегося режима. Наличие же первоначально разомкнутого ключа обеспечивает нулевые (точнее близкие к нулевым) начальные условия.
Графики переменных двигателя на рис. 4.10 не приведены, поскольку они полностью совпадают с представленными на рис. 4.8 и 4.9.
Рис.4.10
Скачать пример (Dpt_Powersys_2.zip)
Таким образом, используя изложенную выше методику, пользователь может создавать модели электротехнических устройств различной степени сложности.
5. Библиотека Simulink-прототипов электротехнических блоков.
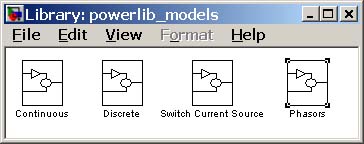
Электротехнические блоки представленные в библиотеке SimPowerSystem как правило недоступны для просмотра и редактирования их содержимого. Однако, иногда, пользователю необходимо познакомиться с устройством модели хотя бы для того, чтобы лучше разобраться как она работает. Часто пользователя не полностью устраивает библиотечный блок, и он хотел бы внести незначительные изменения для наилучшего решения своей задачи. Весьма полезно также познакомиться с устройством основных блоков для того, чтобы научиться делать их самому. Для реализации перечисленных выше задач в SPS имеется отдельная библиотека Simulink-моделей электротехнических блоков (Simulink-прототипов). Пользователь может открыть библиотеку из основного окна MATLAB, набрав в командной строке powerlib_models. Библиотека прототипов (рис. 5.1) содержит 4 раздела:
· Continuous - непрерывные модели,
· Discrete - дискретные модели,
· Switch Current Source - модели ключей,
· Phasors - модели устройств для расчета установившегося режима.
Рис. 5.1
Отличие моделей в этой библиотеке заключается в том, что это обычные Simulink-модели, имеющие однонаправленные входные и выходные порты и соединяющиеся однонаправленными линиями связи, в то время как SPS модели имеют фактически двунаправленные порты и должны соединяться двунаправленными линиями связи. Для создания полноценной SPS на основе прототипа модели разработчику необходимо дополнить прототип источником тока и датчиком напряжения как изложено в главе посвященной пользовательским моделям. Для этого каждый Simulink-прототип имеет вход v, на который нужно подать сигнал пропорциональный напряжению и выход i, подключаемый к источнику тока.
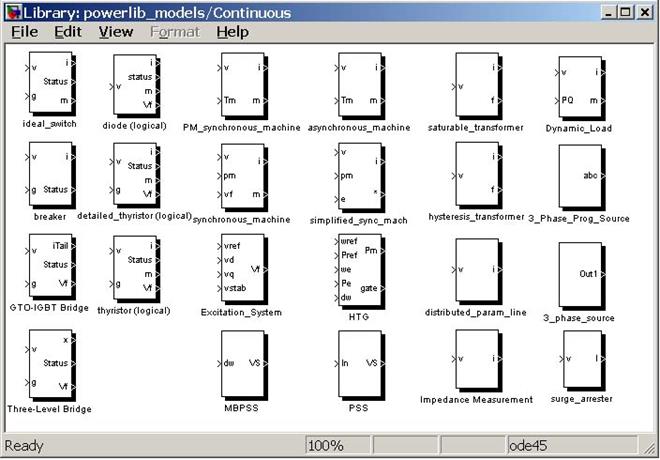
Библиотека Continuous (рис. 5.1) содержит два типа блоков:
· модели электрических машин, насыщающегося трансформатора, грозозащитного разрядника и линии электропередачи с распределенными параметрами,
· блоки логики переключения полупроводниковых устройств с естественной коммутацией (Breaker, Diode, Thyristor и Universal Bridge).
Рис. 5.2
Дискретная библиотека содержит дискретные варианты блоков библиотеки Continuous.
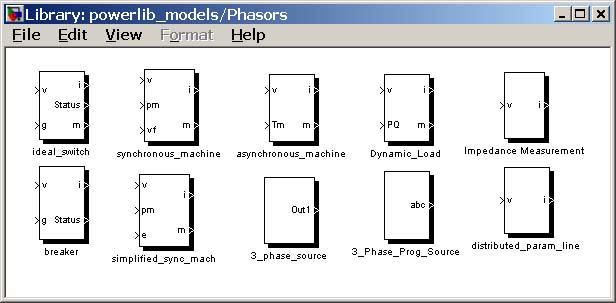
Библиотека Phasors (рис. 5.3) включает модели электрических машин, ключей и линии электропередачи, предназначенные для расчета установившегося режима.
Рис. 5.3
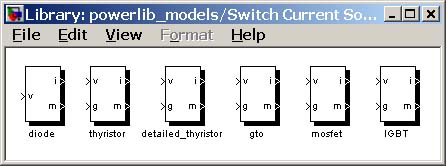
Библиотека Switch Current Source (рис. 5.4) включает модели диода и тиристора, для которых индуктивность во включенном состоянии Lon > 0, а также полностью управляемых полупроводниковых приборов (GTO тиристоров, IGBT и MOSFET транзисторов).
Рис. 5.4
При создании моделей на базе прототипов с использованием источников тока, следует иметь в виду, что такие модели нельзя включать последовательно с индуктивностью. Для устранения этого ограничения следует шунтировать либо индуктивность, либо саму модель резистором с достаточно большим сопротивлением.
6. Основные команды Matlab для управления SPS-моделью.
При разработке графического интерфейса пользователя, создании S-функций и т.п. задач требующих управления конфигурацией, параметрами и работой Simulink и SimPowerSystem моделей допускается использовать специальные команды (функции) языка MATLAB. Для работы с SPS-моделью допускается применять те же самые команды, что и для Simulink моделей (add_line, add_block, get_param, set_param и т.д.). При этом следует иметь в виду, что некоторые Simulink-команды будут иметь ограничения. Так, например, команда set_param не позволяет изменять параметры SPS-блоков в процессе расчета как для Simulink-блоков.
Для SPS-моделей есть и свои особенные команды. Их всего три:
· powerinit - задание начальных условий SPS-модели,
· circ2ss - нахождение математического описания линейной модели электрической цепи в уравнениях пространства состояний,
· power2sys - анализ SPS-модели.
В большинстве случаев пользователю нет необходимости принудительно вызывать эти функции, поскольку они вызываются SimPowerSystem автоматически при начале расчета либо из графической среды пользователя Powergui.
powerinit
Инициализация SPS-модели
Назначение:
Задание начальных условий.
Синтаксис:
powerinit(system,'look') Команда выводит начальные значения переменных модели system.
powerinit(system,'reset') Команда устанавливает нулевые начальные значения переменных модели system.
powerinit(system,'steady') Команда устанавливает начальные значения переменных модели system таким образом, чтобы расчет начался из точки установившегося режима.
powerinit(system,'set',p) Команда устанавливает начальные значения переменных модели system заданные в векторе p. Порядок следования переменных можно определить командой powerinit(system,'look').
powerinit(system,'setb',state,value) Команда устанавливает начальное значение value переменной state модели system.
Пример:
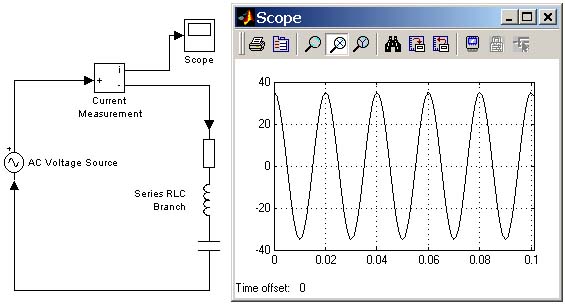
На рис. 6.1 показана модель последовательного колебательного контура подключенного к источнику постоянного тока. Имя файла модели - sys.mdl.
Рис. 6.1
Выполнение команды powerinit(sys,'look') в окне MATLAB позволяет увидеть начальные значения переменных модели:
На осциллограмме видно, что начальное значение тока контура равно значению найденному с помощью функции powerinit.
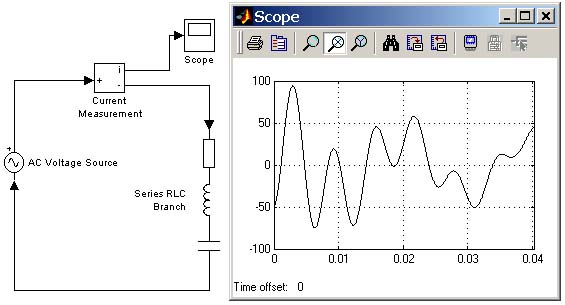
Пример:
Команда powerinit('sys','setb','Il_Series RLC Branch',-50) задает значение тока в RLC-цепи равное -50А. На рис. 6.2 показана осциллограмма тока для расчета схемы с указанным начальным значением тока.
Рис. 6.2
Скачать пример (sys.zip)
circ2ss
Определение математической модели электрической схемы
Назначение:
Функция рассчитывает матрицы A, B, C, В уравнений пространства-состояния, описывающих модель:
x = Ax + Buy = Cx + Du
где
x - вектор состояния,
u - вектор входных воздействий,
y - вектор выходных сигналов,
A, B, C, D - матрицы: системы, входа, выхода и обхода, соответственно.
Функция circ2ss вызывается автоматически функцией power2sys при начале расчета модели. Можно также запускать функцию на выполнение непосредственно из командного окна MATLAB или из m-файла.
Синтаксис:
Вызов функции должен выполняться минимум для 7 аргументов:
· rlsw - матрица размерностью (nswitch, 2) содержащая значения R(Ом) и L(Гн) ключей, где nswitch - число ключей в схеме.
· u, x, y - матрицы содержащие комплексные значения установившихся величин: u(ninput,nfreq) - входные величины, y(noutput,nfreq) - выходные величины, x(nstates,nfreq) - переменные состояния, где: nfreq - размерность вектора freq, содержащего значения частот источников схемы.
· Asw,Bsw,Csw,Dsw - матрицы уравнений пространства-состояния схемы для закрытых состояний ключей. Каждый закрытый ключ имеющий внутреннюю индуктивность добавляет одну переменную состояния схемы.
· Hlin - трехмерный массив (nfreq, noutput, ninput) комплексных взаимных сопротивлений вход-выход для каждого значения частоты.
· line_dist - матрица линий передачи, содержащая параметры линий передачи.
· yout - строковая матрица, задающая выражения для расчета выходных переменных. Каждое выражение может содержать линейную комбинацию значений переменных состояния и их производных.
· unit - строковый параметр задающий единицы измерения. Если значения параметра равно 'OHM', то значения R, L и С задаются в Ом для базовой частоты, определяемой параметром freq_sys (по умолчанию - 60 Гц). Если значение параметра равно 'OHU', то значение R задается в Ом, L - в mГн и С - в мкФ. Функция circ2ss может вызываться также с 12, 13, 14 или 16 аргументами. Подробности о форматах каждого аргумента можно найти в руководстве пользователя для SimPowerSystem.
power2sys
Определение математической модели электрической схемы, созданной в SimPowerSystem
Назначение:
Функция рассчитывает матрицы A, B, C, В уравнений пространства-состояния, описывающих модель:
x = Ax + Buy = Cx + Du
где
x - вектор состояния,
u - вектор входных воздействий,
y - вектор выходных сигналов,
A, B, C, D - матрицы: системы, входа, выхода и обхода, соответственно.
Функция power2sys вызывается автоматически из Simulink при начале расчета модели. Можно также запускать функцию на выполнение непосредственно из командного окна MATLAB или из m-файла.
Синтаксис:
power2sys('sys','structure') Команда создает структуру для модели sys. Поля структуры имеют тот же смысл, что и данные, возвращаемые функцией circ2ss.
Подробности о способах использования функции power2sys можно найти в руководстве пользователя для SimPowerSystem.

 ,
,
 ,
,
 ,
,
 ,
,
 - скорость вращения вала двигателя,
- скорость вращения вала двигателя,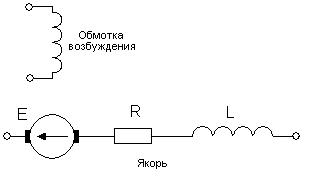
 .
.