С помощью функции G01 инструмент движется по прямым параллельным осям, наклонным или имеющим любое расположение в пространстве. Линейная интерполяция позволяет создавать 3D-поверхности, пазы и прочее. Интерполяция может происходить по одной, двум или трем координатным осям. Если дополнительно не вводится специальная функция выбора плоскости интерполяции (функции G17-G19), то автоматически устанавливается плоскость XY для фрезерной обработки и ХZ для токарной обработки.
Инструмент движется с подачей, заданной под адресом F по прямой от стартовой точки, которой являются координаты, заданные в предыдущем кадре, к запрограммированной в данном кадре точке назначения. На этой траектории осуществляется обработка детали. Для обработки необходимо указать число оборотов S и направление вращения шпинделя M03 или M04.
G01 действует модально до отмены функциями G00, G02, G03. Поэтому при неизменном способе интерполяции повторять функцию в каждом кадре ненужно.
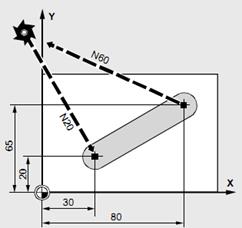
Рисунок 11 -
Программирование линейной интерполяции по двум осям на фрезерном станке
Пример программирования линейной интерполяции по двум осям координат (рис.11):
N10 G17 Т1 S2700 M3 F0,5 D1 LF (Задание рабочей плоскости, смена инструмента, задание коррекции на размер инструмента, задание режимов резания)
N20 G00 G90 X20 Y30 Z2 LF (Перемещение инструмента в координату X20 Y30 Z2 на ускоренном ходу, задание координат в абсолютной системе, размеры по умолчанию заданы в метрической системе)
N30 G01 Z-5 LF (Задание линейной интерполяции, опускание инструмента по координате Z на рабочей подаче)
N40 X80 Y65 LF (Перемещение в точку 2 с той же подачей)
N50 Z2 LF (Подъем по координате Z)
N60 G00 X-50 Y100 Z50 LF (Перемещение в исходную точку на ускоренном ходу)
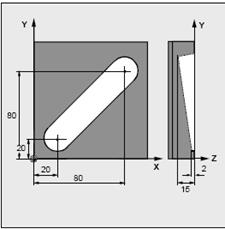
Пример программирования линейной интерполяции по трем осям координат (рис.12):
N10 G17 G94 G96 Т2 S150 F500 M3 D2 (Выбор рабочей плоскости, задание скорости резания в м/мин (V=150 м/мин), вращение шпинделя по часовой стрелке, задание подачи в мм/мин (S=500 мм/мин), задание номера инструмента и номера корректора)
N20 G00 X20 Y20 Z2 (Подход к стартовой позиции на ускоренном ходу)
N30 G01 Z-2 (Подача инструмента по оси Zна раб очей подаче, движение по прямой)
N40 X80 Y80 Z-15 (Движение по наклонной прямой)
N50 G00 Z2 (Подъем инструмента по оси Z)
N60 G28 (Отход к позиции смены инструмента на ускоренном ходу)
N70 М02 (Конец программы)
Рисунок 12 -
Программирование линейной интерполяции по трем осям
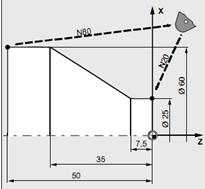
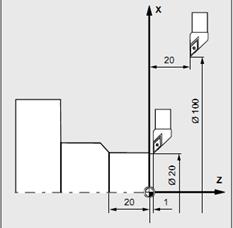
Пример программирования линейной интерполяции на токарном станке (рис.13):
Рисунок 13 -
Программирование линейной интерполяции (точение)
N10 G90 Т1 S400 F0.2 M3 D1* (Ввод абсолютного размета, вращение шпинделя вправо со скоростью n=400 об/мин, подача S=0,2 мм/об, задание номера инструмента и номера корректора, плоскость обработки по умолчанию XZ)
N20 G00 G42 X25 Z5* (Подвод к стартовой позиции на ускоренном ходу с учетом коррекции на радиус инструмента, движение справа от контура детали)
N30 G01 Z-7.5* (Точение шейки вала Æ25 мм на длину 7,5 мм, перемещение по прямой на рабочей подаче)
N40 X60 Z-35* (Точение конического участка вала)
N50 Z-50* (Точение шейки вала Æ60 мм)
N60 G40 X62* (Отвод инструмента от детали, отмена коррекции на радиус инструмента)
N70 G00 X80 Z20* (Отвод инструмента в исходную точку на ускоренном ходу)
N80 M02* (Конец программы)
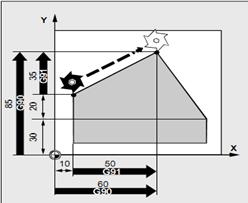
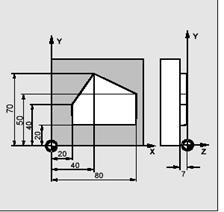
Пример программирования фрезерной обработки с различным способом задания координат (рис.14).
Рисунок 14 -
Программирование фрезерной обработки
N10 G17 G94 G96 Т2 S150 F500 M3 D2 (Выбор рабочей плоскости, задание скорости резания в м/мин (V=150 м/мин), вращение шпинделя по часовой стрелке, задание подачи в мм/мин (S=500 мм/мин), задание номера инструмента и номера корректора)
N20 G00 G90 G41 X10 Y50 Z2* (Подход к стартовой позиции на ускоренном ходу с учетом коррекции на радиус инструмента, движение справа от контура детали, задание координат в абсолютной системе)
N30 G01 Z-2* (Подача инструмента по оси Zна раб очей подаче, движение по прямой)
N40 X60 Y85* (Перемещение в т.2 в абсолютной системе координат)
или
N40 G91 X50 Y35* (Перемещение в т.2 в относительной системе координат)
N50 G00 G40 Z2 (Подъем инструмента по оси Z, отмена коррекции)
N60 G28 (Отход к позиции смены инструмента на ускоренном ходу)
N70 М02 (Конец программы)
Пример программирования токарной обработки с различным способом задания координат (рис.15).
N10 G90 Т1 S400 F0.2 M3 D1* (Ввод абсолютного размета, вращение шпинделя вправо со скоростью n=400 об/мин, подача S=0,2 мм/об, задание номера инструмента и номера корректора, плоскость обработки по умолчанию XZ)
N20 G00 G42 X25 Z5* (Подвод к стартовой позиции на ускоренном ходу)
N30 G01 G91 Z-7.5* (Точение шейки вала Æ25 мм на длину 7,5 мм, перемещение по прямой на рабочей подаче, задание размеров в относительной системе координат)
N40 X35 Z-42.5* (Точение конического участка вала)
N50 G40 X62* (Отвод инструмента от детали, отмена коррекции на размер инструмента)
N60 G00 X80 Z20* (Отвод инструмента в исходную точку на ускоренном ходу)
N70 M02* (Конец программы)
Рисунок 15 -
Программирование токарной обработки
Примерпрограммирования токарной обработки с учетом коррекции (рис.16).
Рисунок 16 - Программирование токарной обработки с учетом коррекций
N20 T1 S400 F0.2 M3 D1 LF (включается только коррекция длины инструмента)
N30 G00 X100 Z20 LF (подвод к X100 Z20 осуществляется без коррекции на радиус)
N40 G42 X20 Z1 LF (включается коррекция радиуса)
N50 G01 Z-20 LF (подвод к точке X20/Z1 осуществляется с коррекцией)
Примерпрограммирования фрезерования выступа на детали (рис.17).
Рисунок 17 - Обработка контура фрезерованием
N10 G28 LF (Выход в позицию смены инструмента на ускоренном ходу)
N30 G00 X0 Y0 Z1 S300 F1.5 M3 LF (Подвод инструмента на ускоренном ходу в точку X0 Y0 Z1, задание режимов резания)
N40 G94 Z-7 F500 LF (Перемещение инструмента по координате Z со скоростью подачи 500 мм/мин)
N50 G41 X20 Y20 D1 LF (Подвод инструмента к точке X20 Y20 на той же подаче с учетом коррекции радиуса инструмента, инструмент работает слева от контура)
N60 G01 Y40 LF (Фрезерование контура на рабочей подаче)
N70 X40 Y70 LF
N80 X80 Y50 LF
N90 Y20 LF
N100 X20 LF
N110 G40 G0 Z100 M2 LF (Отмена коррекций, перемещение инструмента по координате Z на ускоренном ходу, конец программы)
Свойство коррекции на диаметр и повторения фрагмента УП (G25) можно использовать для черновой и чистовой обработки контура. Дополним УП кадрами:
N115 М01 (Останов шпинделя с подтверждением)
N120 G01 G41 X20 Y20 D2 F50 S1100 (Ввод чистовых режимов резания и нового корректора)
N10 G25 60 100 01 (Повтор управляющей программы с кадра №60 по кадр №100 один раз)
Например, при обработке контура фрезой диаметром диаметр d=40мм необходимо оставить припуск на чистовую обработку 0,5мм. В память ЧПУ записываем величину корректора D1=(40+0.5*2)=41мм. В корректор D2 вводится значение действительного диаметра фрезы.
Технологический останов М01 в кадре № 115 необходим для контрольных измерений детали и при необходимости корректировки D2.