Поскольку в импульсных приводах угловая скорость якоря ИД пульсирует из-за изменения мгновенного значения напряжения на обмотке якоря ИД, то под механическими характеристиками системы ИУ—ИД понимают зависимость средней за период коммутации угловой скорости якоря ИД Wдв..ср от среднего (за период) вращающего момента Мдв.ср (или от статического момента сопротивления нагрузки) при постоянном значении скважности импульсов g, т.е. Wдв..ср =f(Мдв.ср) при g = const.
Под регулировочными характеристиками системы ИУ—ИД понимают зависимость средней за период коммутации угловой скорости ИД от среднего за период напряжения на обмотке якоря ИД или скважности импульсов при постоянном моменте нагрузки на валу ИД, т.е. Wдв..ср =f(g)при Мдв.ср= const. Переменные Wдв..ср и Мдв.ср в обеих характеристиках могут быть заменены на соответствующие им переменные Wдв..ср и М*дв.ср , приведенные к выходному валу привода.
При выводе формул для статических характеристик системы ИУ—ИД будем считать, что напряжение на обмотке якоря ИД представляет собой последовательность разнополярных прямоугольных импульсов с разной амплитудой положительных и отрицательных импульсов (рис. 9.1), т.е. в течение интервала I (0 ... tи) напряжение на обмотке якоря равно (/^а в течение интервала II (tи ... Т) равно UII. Это позволит получить соотношения, справедливые для импульсных приводов как с симметричным, гак и несимметричным законом коммутации.
Рис. 9.1
На рис. 9.1 также показаны эпюры электрического тока в обмотке якоря при установившемся режиме. Для интервала I (0 ... tи) справедлива следующая система дифференциальных уравнений:
(9.1)
(9.2)
(9.3)
Для интервала II (tи ... Т) имеем
(9.4)
(9.5)
(9.6)
В этих уравнениях WсI, IяI и M'двI — соответственно мгновенные значения угловой скорости, тока и момента в интервале I, а WсII, IяII и M'двII – в интервале II
Среднее значение вращающего момента ИД
(9.7)
где
С другой стороны, используя уравнения (9.3) и (9.6), можно получить выражение для среднего вращающего момента ИД
где
Для установившегося режима W cII (Т) = Wс1(0), поэтому, учитывая, что WcII (tи) = Wс1(tи), имеем DW сI = - DWсII. Следовательно,
(9.8)
Среднее значение напряжения на обмотке якоря ИД
где a=UII/UI
При симметричном законе коммутации UII=- UI и a=-1, при несимметричном законе UII = 0 и a = 0. Обозначив напряжение питания мостовой схемы через Uп, будем иметь
UI=Uп и (9.9)
С другой стороны, используя уравнения (9.1) и (9.4), выражение для среднего значения напряжения на обмотке якоря ИД получим в следующем виде:
Это выражение можно представить так
где причем
Так как рассматривается квазиустановившийся режим работы ИД , следовательно, DiI+DiII=0. Учитывая также, что и
имеем
(9.10)
Используя выражения (9.7) и (9.10), получаем выражение для механических характеристик системы ИУ—ИД в следующем виде
(9.11)
здесь ; , где U дв.ср определяется выражением (9.9).
Таким образом, механические характеристики системы ИУ—ИД представляют собой семейство параллельных прямых и эквивалентны механическим характеристикам ИД при управлении от источника напряжения постоянного тока. Эти характеристики показаны на рис. 9.2.
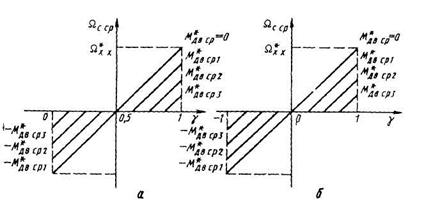
Преобразовав выражение (9.11), можно получить уравнение регулировочных характеристик системы ИУ—ИД Wс.ср=f(g) при M дв.ср=const в следующем виде
(9.12)
Регулировочные характеристики, построенные по этой формуле для симметричного и несимметричного способов коммутации, показаны на рис. 9.3. Эти характеристики, как и при управлении ИД от источника постоянного тока, имеют вид параллельных прямых.
При рассмотрении статических характеристик системы ИУ—ИД было условно принято, что транзисторные ключи выходного каскада идеальны.
Рис. 9.2
Рис. 9.3
Реальные ключи имеют конечное сопротивление в замкнутом состоянии, а, кроме того, в схему моста могут быть включены дополнительные вспомогательные сопротивления. Поэтому импульсный усилитель обладает некоторым внутренним выходным сопротивлением Rвых. Жесткость механических характеристик системы ИУ — ИД несколько понижается и с учетом Rвых может быть рассчитана по следующей формуле F=кекм/Rя, где Rя = Rдв + Rвых - суммарное сопротивление цепи якоря с учетом внутреннего сопротивления усилителя мощности.
При выводе формул было принято, что источник питания имеет внутреннее сопротивление, равное нулю. Реально, конечно, это сопротивление отличается от нулевого.
1 Динамические свойства системы импульсный усилитель—исполнительный двигатель.

 (9.1)
(9.1) (9.2)
(9.2) (9.3)
(9.3) (9.4)
(9.4) (9.5)
(9.5) (9.6)
(9.6)
 (9.7)
(9.7)


 (9.8)
(9.8)
 (9.9)
(9.9)

 причем
причем 
 , следовательно, DiI+DiII=0. Учитывая также, что
, следовательно, DiI+DiII=0. Учитывая также, что  и
и 
 (9.10)
(9.10) (9.11)
(9.11) ;
;  , где U дв.ср определяется выражением (9.9).
, где U дв.ср определяется выражением (9.9). (9.12)
(9.12)