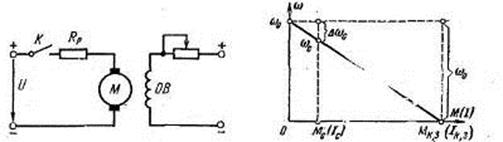
Переходный процесс пуска двигателя постоянного тока независимого возбуждения до основной скорости происходит в случае питания двигателя от сети постоянного тока при замыкании в цепи якоря выключателя К (рис. 4.1). В приведенной схеме постоянно включен резистор, следовательно, общее сопротивление цепи якоря
При исследовании процесса пуска полагаются неизменными: магнитный поток двигателя Ф, напряжение сети U и момент нагрузки Mс. Кроме того, индуктивность обмотки якоря принимается Lя= 0.
мa пуска двигателя постоянного кая характеристика двигателя
тока независимого возбуждения постоянного тока независимого
в одну ступень, возбуждения.
Уравнения электрического и механического равновесия системы при пуске:
(4.1)
(4.2)
Если из (4.2) определить значение тока якоря i и подставить его в (4.1), а затем разделить его левую и правую части на с, то после несложных преобразований получим:
или
(4.3)
где 0= U/c— угловая скорость двигателя при идеальном холостом ходе; с= MсR/c2 — перепад угловой скорости при нагрузке моментом Мс (рис. 4.2); Тм = JRIc2 = J 0/Mк,з — электромеханическая постоянная времени.
Электромеханической постоянной времени называется время, в течение которого привод, обладающий моментом инерции J, разгоняется без нагрузки из неподвижного состояния до угловой скорости идеального холостого хода й0 при неизменном моменте, равном моменту короткого замыкания MK,3. Необходимо отметить, что постоянная времени зависит от Мк,з .С увеличением сопротивления цепи якоря момент Мк,3 уменьшается и соответственно увеличивается постоянная времени. Электромеханическая постоянная времени не зависит от нагрузки.
Уравнение (4.2) может быть записано иначе:
Решение этого уравнения дает:
(4.4)
где С– постоянная интегрирования, определяемая по начальным условиям переходного режима.
Для t=0 начальное значение угловой скорости = нач, поэтому
Теперь легко получить уравнение для угловой скорости двигателя при пуске в общем виде:
(4.5)
где ωс — установившаяся угловая скорость двигателя при моменте нагрузки Мс (рис. 4.2).
В частном случае, когда пуск двигателя совершается под нагрузкой из неподвижного состояния ( нач = 0),
(4.6)
При пуске без нагрузки до установившейся угловой скорости 0
(4.7)
Аналогичные формулы получаются, если вместо угловой скорости использовать частоту вращения двигателя п, об/мин, приводимую в каталогах.
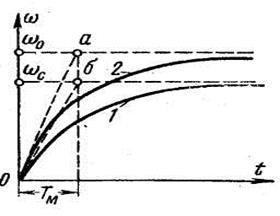
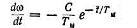
На рис. 4.3 представлены кривые = f(t) при пуске двигателя постоянного тока независимого возбуждения под нагрузкой (кривая 1) и без нагрузки (кривая 2). Согласно (4.6) и (4.7) процесс пуска теоретически заканчивается за бесконечно большое время. Однако практически можно считать процесс пуска закончившимся при tп = = (3 4) Тм, так как угловая скорость в этом случае отличается от установившегося значения не более чем на 5—2 %. Из (4.6) вытекает, что
Таким образом, для t=3 Тм угловая скорость привода отличается от установившегося значения не более чем на 5 %, и можно считать, что неустановившийся процесс к этому времени практически закончится.
Если бы пуск двигателя совершался с неизменным моментом, равным Мк,3, то угловая скорость двигателя во времени изменялась бы по прямой Оа при пуске двигателя без нагрузки и по Об — при пуске под нагрузкой (рис. 7.3).
Рис. 4.3 Кривые ω==f(t) при пуске двигателя постоянного тока независимого возбуждения в одну ступень.
Следовательно, если провести через начало координат касательную к кривой 2 до пересечения с горизонталью, проходящей через точку 0, то полученный отрезок 0а даст в определенном масштабе значение t = Тм. Если же аналогичным путем провести касательную к прямой 1, то отрезок сб также будет равен Тм.
Зависимость тока в цепи якоря от времени при пуске двигателя определяется из (4.2):
где Iс = Mc/c — ток нагрузки.
Определив из (4.4)
и подставив значение производной в уравнение для тока, получим:
(4.8)
Для начальных условий при t = 0; i = Iнач постоянная интегрирования
Подставив постоянную интегрирования С в (4.8), найдем:
(4.9)
Начальное значение тока в общем виде определяется по формуле
В частном случае, когда пуск совершается из неподвижного состояния двигателя, ЭДС его равна 0 и Iнач = Iкз = U/R.
Ток в якоре при этом выражается зависимостью
(4.10)
При пуске без нагрузки, когда Iс = 0,
(4.11)
По (4.10) и (4.11) построены кривые i= f(t), приведенные на рис. 4.4.
Из рассмотрения (4.5), (4.6), а также (4.10) и (4.11) можно заключить, что если механическая характеристика двигателя линейна и момент нагрузки постоянен, то = f(t) и i=f1(t) выражаются простыми экспоненциальными зависимостями.
При многоступенчатом резисторном пуске двигателя постоянного тока независимого возбуждения и постоянном напряжении сети задаются обычно определенными границами колебаний пускового тока или пускового момента. В этом случае для нахождения времени пуска удобнее пользоваться в качестве исходного не уравнением угловой скорости, а уравнением тока (4.9).
Процесс пуска двигателя в несколько ступеней, изображенный на рис. 4.5, характерен тем, что ток двигателя во время пуска колеблется в пределах от I1 до I2. В начале пуска Iнач = I1, далее по мере ускорения двигателя растет его ЭДС, вследствие чего начинает уменьшаться ток в цепи якоря двигателя, а следовательно, и момент двигателя. Когда ток достигнет некоторого значения I2, выключается часть пускового резистора с таким расчетом, чтобы ток двигателя снова достиг значения I1 и т. д.
Найдем время tx, в течение которого ток двигателя изменяется от I1 до I2. Для этого воспользуемся уравнением (4.9), написав его в следующем виде:
(4.12)
где I1 и I2 — границы изменения пускового тока (рис. 4.5); tx - время разбега двигателя на рассматриваемой ступени пускового резистора; Тмх — электромеханическая постоянная времени для той же ступени.
Рис. 4.4. Кривые i = f(t) при Рис. 4.5. Графики при реостат- пуске двигателя постоянного ном пуске двигателя постоян- тока независимого возбуждения ного тока независимого воз- в одну ступень. буждения в несколько ступе-
1-пуск под нагрузкой; 2-пуск ней.
вхолостую.
Постоянная времени для каждой ступени резистора соответствует суммарному сопротивлению цепи якоря.
Решая (4.12) относительно времени разбега, находим:
(4.13)
Если значение тока нагрузки Iс не изменяется, то под знаком логарифма стоит постоянная величина и, следовательно, можно написать:
(4.14)
По мере выведения резистора сопротивление цепи якоря уменьшается, а следовательно, уменьшается и электромеханическая постоянная времени, что приводит в свою очередь к уменьшению времени разбега на каждой последующей ступени, т. е. tx1 > tx2 > tx3 и т. д.
Приведенная на рис. 4.5 зависимость i= f (t) построена на основании (4.9) с учетом сказанного выше, а кривая угловой скорости двигателя = f(t) построена по (4.5). Время переходного процесса на последней ступени (при I = Iс или = с) получается равным бесконечности.
Рис. 4.6 Графики =f(t) и i=f(t) при пуске в одну ступень под нагрузкой двигателя постоянного тока независимого возбуждения, построенные с учетом электромагнитной инерции якоря.
Практически для этой ступени надо принимать подобно предыдущему
В тех случаях, когда время протекания электромагнитных процессов соизмеримо со временем протекания механических процессов, приходится учитывать и влияние электромагнитной инерции цепи якоря, которым мы до сих пор пренебрегали. На рис. 4.6 показаны кривые пуска двигателя при постоянном напряжении сети и учете индуктивности якоря. Как видно из рис. 4.6, пуск двигателя состоит из двух этапов.
Первый этап: якорь двигателя неподвижен, пока ток в якоре не достигнет значения, необходимого для создания момента трогания. На этом этапе увеличение тока двигателя зависит от скорости протекания электромагнитного
процесса, определяемого уравнением напряжений для цепи якоря двигателя:
(4.15)
Решение (4.15) при индуктивности якоря Lя = const дает закон изменения тока в якоре при неподвижном якоре
(4.16)
где Iк,3=U/R—ток короткого замыкания двигателя; Тэ=L/R — электромагнитная постоянная времени цепи якоря; она имеет размерность времени и определяет скорость протекания электромагнитных процессов.
Кривая тока, построенная по (4.16), изображена на рис. 4.6 в пределах промежутка времени t3 сплошной кривой, а за его пределами—штриховой. Время t3. которое называют временем запаздывания, определяется из (4.16) при подстановке тока i = Iс. В этом случае
(4.17)
Следует отметить, что в действительности время запаздывания будет несколько больше времени, подсчитанного по (4.17). Это дополнительное запаздывание пуска двигателя объясняется тормозящим влиянием вихревых токов, возникающих в стали двигателя.
По истечении времени t3 якорь начнет вращаться. Угловая скорость двигателя возрастает, и ЭДС, возникающая в якоре, влияет на ток двигателя. Теперь уже оба процесса — электромагнитный и электромеханический протекают совместно, составляя единый процесс пуска двигателя. Расчет тока якоря и угловой скорости двигателя при Ф = const необходимо вести, исходя из следующих уравнений:
(4.18)
Разделив обе части последнего равенства на с, получим:
(4.19)
Совместное решение уравнений (4.18) и (4.19) приводит к линейному дифференциальному уравнению второго порядка относительно
(4.20)
где с — установившееcя значение угловой скорости при моменте нагрузки Мc.
Решение этого дифференциального уравнения имеет вид:
В — постоянные интегрирования, определяющиеся начальными условиями.
Соответственно для тока:
(4.22)
При условии, что Тм > 4 Тэ, корни уравнения а1 и a2 имеют действительные отрицательные значения, а выражения для угловой скорости и тока с учетом постоянных интегрирования имеют вид:
(4.23)
(4.24)
Кривые угловой скорости и тока, полученные по (4.23) и (4.24), показаны на рис. 4.6. Угловая скорость асимптотически стремится к с, а ток, достигнув максимума уменьшается, асимптотически приближаясь к значению Iс.
(4.25)
В процессе прямого пуска двигателя индуктивность якоря ограничивает пик тока и увеличивает время пуска. Из (4.25) следует, что максимум тока зависит от соотношения постоянных времени Тэ и Тм. Реальное соотношение этих постоянных времени таково, что ограничение тока при прямом пуске оказывается незначительным и пик тока превосходит допустимое по условиям коммутации значение. Поэтому прямой пуск (без добавочных резисторов) практически недопустим для двигателей мощностью более 0,5—1 кВт. Для ограничения тока при пуске вводится в цепь якоря пусковой резистор. При этом Тэ уменьшается, а Тм увеличивается настолько, что оказывается ТэТм.
Если ТэТм, то можно приближенно принять:
(4.26)
Тогда при Iс = 0 получим более простые выражения для определения угловой скорости и тока, а именно:
(4.27)
(4.28)
Как видно из (4.27) — (4.28), при ТэТм (при большом сопротивлении добавочного резистора) индуктивность якоря практически не сказывается на переходных процессах.
Пик тока при прямом пуске можно попытаться уменьшить введением в якорь реактора (индукционной катушки). Однако при этом процесс разбега приобретает нежелательный колебательный характер, если 4Тэ > Тм.
При Тм < 4Тэ корни а1 и а2 есть комплексные числа:
Уравнение для определения угловой скорости в данном случае:
(4.30)
(4.31)
Из (4.30) и (4.31) следует, что изменения угловой скорости и тока имеют характер затухающих колебаний (рис. 4.7). Из-за колебательного характера процесса существенно увеличивается время пуска, возникает значительное перерегулирование угловой скорости (превышение над установившимся значением) и снижается эффективность ограничения пика тока. Так, для граничного значения ТВ = Tм/4 при пуске вхолостую
Imax 0,73 IK,3, a при ТВ=1,25 Тм пик тока Imax 0,52 Iк,з, что обычно превышает допустимый по условиям коммутации ток. Поэтому пуск с индукционной катушкой на практике не применяют, а используют пусковые резисторы, при наличии которых влияние индуктивности якоря на процесс, как было показано выше, несущественно.


 (4.1)
(4.1) (4.2)
(4.2)
 (4.3)
(4.3) 0= U/c— угловая скорость двигателя при идеальном холостом ходе;
0= U/c— угловая скорость двигателя при идеальном холостом ходе;  с= MсR/c2 — перепад угловой скорости при нагрузке моментом Мс (рис. 4.2); Тм = JRIc2 = J
с= MсR/c2 — перепад угловой скорости при нагрузке моментом Мс (рис. 4.2); Тм = JRIc2 = J 
 (4.4)
(4.4)
 (4.5)
(4.5) (4.6)
(4.6) (4.7)
(4.7) 4) Тм, так как угловая скорость в этом случае отличается от установившегося значения не более чем на 5—2 %. Из (4.6) вытекает, что
4) Тм, так как угловая скорость в этом случае отличается от установившегося значения не более чем на 5—2 %. Из (4.6) вытекает, что
 (4.8)
(4.8)
 (4.9)
(4.9)
 (4.10)
(4.10) (4.11)
(4.11) (4.12)
(4.12)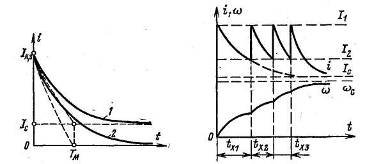
 (4.13)
(4.13) (4.14)
(4.14)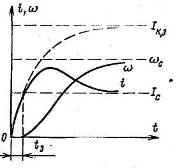


 Решение (4.15) при индуктивности якоря Lя = const дает закон изменения тока в якоре при неподвижном якоре
Решение (4.15) при индуктивности якоря Lя = const дает закон изменения тока в якоре при неподвижном якоре (4.17)
(4.17) (4.18)
(4.18) (4.19)
(4.19) (4.20)
(4.20) (4.21)
(4.21)
 );A,
);A, (4.22)
(4.22) (4.23)
(4.23) (4.25)
(4.25)
 (4.27)
(4.27)
 0,73 IK,3, a при ТВ=1,25 Тм пик тока Imax
0,73 IK,3, a при ТВ=1,25 Тм пик тока Imax