Двигатели постоянного тока нашли широкое применение в следящих приводах вследствие их хороших регулировочных характеристик.
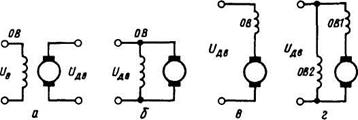
Двигатели классифицируют по типу возбуждения и конструкции якоря. По типу возбуждения двигатели бывают электромагнитного (с помощью обмотки возбуждения) и магнитоэлектрического (с помощью постоянного магнита) возбуждения. Двигатели электромагнитного возбуждения подразделяются по способу подключения обмотки возбуждения (ОВ) по отношению к обмотке якоря (ОЯ) на двигатели независимого (рис. 3.1, а), параллельного (рис. 3.1, б), последовательного (рис. 3.1, в) и смешанного (рис. 3.1,г) возбуждения.
В качестве исполнительных двигателей (ИД) постоянного тока в следящих электроприводах чаще всего используют двигатели независимого и магнитоэлектрического возбуждения. Реже применяют двигатели последовательного возбуждения.
По конструкции якоря двигатели постоянного тока подразделяются на двигатели с "обычным" (зубцовым) якорем, с гладким (беззубцовым) якорем, с печатным дисковым и цилиндрическим якорем и двигатели с полым ротором.
Зубцовое исполнение якоря является традиционным. К недостаткам такой конструкции относится возможность насыщения зубцов шихтованного железа якоря при больших токах в обмотке якоря, а следовательно, ограничение вращающего момента двигателя. Достоинство такой конструкции якоря в его механической прочности. Примерами ИД с зубцовым якорем являются двигатели серий Д, МИ, ДПМ. Другие конструктивные исполнения якоря позволили улучшить динамические характеристики двигателей, т.е. уменьшить их механическую и электромагнитную постоянные времени.
Двигатели с гладким якорем могут иметь более высокую электромагнитную индукцию в воздушном зазоре.
Рис. 3.1
Это обстоятельство вместе с возможностью уменьшить диаметр якоря (момент инерции ротора) по сравнению с ИД с зубцовым якорем обеспечивает уменьшение механической постоянной времени ИД. Так как обмотка якоря в таких двигателях наклеивается на тело якоря снаружи, то воздушный зазор между статором и железом якоря становится большим. Это существенно уменьшает электромагнитную постоянную времени двигателя, но одновременно увеличивает размеры ИД вследствие увеличения размеров индуктора. Примерами ИД с гладким беззубцовым якорем являются двигатели серий МИГ, ПГТ.
Возможность уменьшения момента инерции якоря ИД и, следовательно, уменьшения механической постоянной времени появляется, если обмотку якоря "развязать" от магнитопровода. К таким ИД относятся двигатели с печатным якорем и полым ротором. В обоих случаях из-за того, что обмотка якоря выносится в воздушный зазор, существенно уменьшается и электромагнитная постоянная времени этой обмотки. Недостатком ИД с печатным якорем является его малая механическая прочность (возможность его коробления при больших моментах на валу ИД). Примерами ИД с печатным якорем являются двигатели серий ПЯ, МРМ. Исполнительные двигатели с полым ротором выпускаются пока только серии ДПР.
Ниже будут рассмотрены характеристики ИД постоянного тока независимого и магнитоэлектрического возбуждения.
К статическим характеристикам ИД обычно относят механические и регулировочные характеристики.
Механическимихарактеристиками называют зависимости угловой скорости Wдв от вращающего момента Мдв двигателя при постоянном значении напряжения на его обмотке якоря Uдв , т.е. зависимости
(3.1)
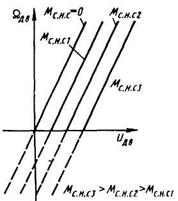
Регулировочными характеристиками называют зависимости угловой скорости Wдв от напряжения на обмотке якоря ИД при постоянном значении вращающего момента М дв или статического момента сопротивления нагрузки Мс.н.с. (так как в статическом режиме Мдвравен моменту сопротивления нагрузки).
Электрическая схема ИД постоянного тока в статическом режиме представлена на рис. 3.2.
Уравнение равновесия напряжений на обмотке якоря для идеализированного двигателя, для которого не учитывается влияние реакции якоря, возможное насыщение участков магнитопровода якоря, переменность сопротивления контакта щеток и пластин коллектора и т.п., имеет вид
, (3.2)
где Rдв- активное сопротивление обмотки якоря; се- коэффициент противо-ЭДС двигателя, зависящий от его конструктивных параметров и магнитного потока возбуждения Фв; I я — ток, протекающий по обмотке якоря.
Если Фв = const, то и се = const, то вращающий момент, развиваемый двигателем,
, (3.3)
где см — коэффициент момента двигателя.
В системе СИ численно .
Определив из выражения (3.3) значение Iя и подставив его в (3.2), получим выражение для механических характеристик двигателя
. (3.4)
Здесь - угловая скорость двигателя в режиме идеального холостого хода (при Iя = 0);
- жесткость механических характеристик двигателя. В общем виде жесткость механических характеристик двигателя определяется выражением
(3.5)
Иногда механическую характеристику представляют в виде
(3.6)
где - вращающий момент двигателя в режиме пуска (пусковой момент), т.е. момент, развиваемый двигателем при Wдв = 0.
Рис. 3.2 Рис. 3.3
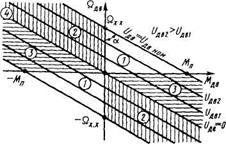
Выражение (3.4) показывает, что механические характеристики ИД постоянного тока независимого возбуждения представляют собой семейство параллельных прямых. Эти характеристики показаны на рис. 3.3. Жесткость механической характеристики ИД может быть также определена по формуле
. (3.7)
Выражение (3.7) применимо при условии линейности характеристики (или ее линеаризации) для любого типа ИД и поэтому является более общим.
На плоскости механических характеристик можно отметить области, соответствующие возможным режимам работы ИД.
Различают следующие режимы работы ИД:
1. Двигательный режим, для которого sign Uдв = - sign(cеWдв) и значение противо-ЭДС исполнительного двигателя cеWдв меньше напряжения на обмотке якоря ИД (области 1 на рис. 3.3). В этом режиме направление электрического тока в обмотке якоря определяется полярностью напряжения внешнего источника Uдв и ИД потребляет энергию от этого источника.
2. Режим генераторного (рекуперативного) торможения (области 2 на рис. 3.3) . В этом режиме sign Uдв= - sign (cеWдв), но значение противо-ЭДС двигателя превышает значение Uдв. Поэтому направление электрического тока в обмотке якоря определяется полярностью противо-ЭДС двигателя и ИД отдает энергию источнику питания.
3. Режим торможения противовключением (области 3 на рис. 3.3). Для этого режима sign(cеWдв) = signUдв, поэтому электрический ток в обмотке якоря обусловлен суммой напряжений внешнего источника питания Uдв и противо-ЭДС двигателя. Величина тока в обмотке якоря в этом случае может быть значительной и вызывать сильный нагрев обмотки якоря и выход ее из строя. Поэтому для статического режима режим противовключения считается, как правило, недопустимым.
4. Режим электродинамического торможения (линия 4 на рис. 3.3). В этом режиме Uдв= 0 и поэтому этот режим является частным случаем режима генераторного торможения. Электрическая энергия, получаемая от источника с напряжением, равным противо-ЭДС двигателя, рассеивается в тепло на активном сопротивлении обмотки якоря (в общем случае, конечно, и во внешней цепи, закорачивающей якорную обмотку).
На рис. 3.4 показаны эквивалентные схемы ИД, соответствующие всем рассмотренным режимам.
Рис. 3.4
При работе ИД в следящем приводе его состояние может изменяться в соответствии с описанными режимами работы.
Уравнение регулировочных характеристик
Wдв = f(Uдв) (3.8)
при Мдв= const практически есть уравнение (3.4), в котором WХ.Х изменяется в соответствии с соотношением
WХ.Х = . (3.9)
Регулировочные характеристики ИД показаны на рис. 3.5.
Рис. 3.5
Штриховыми линиями показано продолжение регулировочных характеристик в область отрицательных значений п для активного момента нагрузки.
Линейность механических и регулировочных характеристик ИД постоянного тока независимого и магнитоэлектрического возбуждения является главным достоинством этих двигателей с точки зрения их применения в следящих приводах. Недостатки этих двигателей связаны с наличием щеточно-коллекторного узла.

 (3.1)
(3.1) , (3.2)
, (3.2) , (3.3)
, (3.3) .
. . (3.4)
. (3.4) - угловая скорость двигателя в режиме идеального холостого хода (при Iя = 0);
- угловая скорость двигателя в режиме идеального холостого хода (при Iя = 0);
 - жесткость механических характеристик двигателя. В общем виде жесткость механических характеристик двигателя определяется выражением
- жесткость механических характеристик двигателя. В общем виде жесткость механических характеристик двигателя определяется выражением (3.5)
(3.5) (3.6)
(3.6) - вращающий момент двигателя в режиме пуска (пусковой момент), т.е. момент, развиваемый двигателем при Wдв = 0.
- вращающий момент двигателя в режиме пуска (пусковой момент), т.е. момент, развиваемый двигателем при Wдв = 0.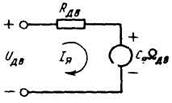
 . (3.7)
. (3.7)
 . (3.9)
. (3.9)