1) При соединении фаз обмотки статора треугольником мощность равна
Pтр. = 3UФIн = UЛ Iн (16-5)
Учитываем, что фазное напряжение равно линейному напряжению
UФ = UЛ
Скорость и момент для соединения треугольником:
ωтр. = (1-s) Mтр. = Pтр./ωтр. (16-6)
2) При соединении фаз обмотки статора двойной звездой секции обмоток статора, соединённые ранее треугольником, включаются по две параллельно, и ток каждой фазы увеличивается в два раза. Уравнение (16-5) умножаем на 2 и получим (16-7)
PYY = UЛ Iн (16-7)
Умножим и разделим (16-7) на 3 и получим
PYY = UЛ Iн = UЛ Iн = Pтр. = 1,15 Pтр.
PYY = Pтр. = 1,15 Pтр. (16-8)
Из (16-8) видно, что мощность при переключении обмоток статора с треугольника на двойную звезду (YY) практически почти не изменилась (PYY = 1,15 Pтр.). Скорость ωтр. = (1-s) после соединения фаз обмоток статора двойной звездой увеличивается в два раза:
ωYY = (1-s) = (1-s) = 2ωтр., (16-9)
ωYY = 2ωтр..
Определим, как изменяется момент двигателя при переключении обмоток статора с треугольника на двойную звезду(YY):
MYY = PYY/ωYY =1.15Pтр./2ωтр. = 0,58 Mтр.
MYY =0,58 Mтр. (16-10)
Таким образом, получили, что переключение обмоток статора асинхронного двигателя с треугольника на двойную звезду позволяет вдвое увеличить скорость, но при этом мощность двигателя почти не изменяется , а моментна валу уменьшается и составляет 0,58 от момента при соединении треугольником(момент уменьшается почти в два раза).
Регулирование скорости асинхронного двигателя изменением числа пар полюсов экономичное, но при этом способе ограничена плавность регулирования (регулирование ступенчатое).
При переходе с «треугольника» на «двойную звезду:
a) мощность увеличивается на 16%, т.е. почти не изменяется (отсюда название способа - «регулирование скорости при постоянной мощности» );
b) скорость увеличивается в 2 раза;
c) момент двигателя уменьшается почти в 2 раза
( М = 0,58 М ).
На судах регулирование скорости переключением обмотки статора со «звезды» на «двойную звезду» применяют в грузоподъемных механизмах, т.к. при этом способе критический момент двигателя не изменяется и потому отсутствует опасность опрокидывания двигателя. В то же время такая опасность существует при переключением обмотки статора с «треугольника» на «двойную звезду», потому что момент двигателя уменьшается почти в 2 раза ( М = 0,58 М ).
На судах переключение обмотки статора с «треугольника» на «двойную звезду» применяют ограниченно, в электроприводах якорно-швартовных устройств для получения самой высокой скорости, которая используется для перемещения свободного (ненагруженного) швартовного каната.
Регулирование скорости асинхронного двигателя изменением частоты тока статора
Изменяющийся по частоте ток статора приводит к изменению угловой скорости поля статора
и пропорционально изменяется скорость ротора. Из выражения (1-1) следует, что регулирование скорости двигателя изменением скорости вращающегося магнитного поля статора происходит без значительного изменения скольжения и позволяет получать различные скорости на жестких механических характеристиках.
С помощью электромашинных и полупроводниковых устройств можно плавно изменять частоту тока статора , а следовательно и скорость двигателя. Скорость двигателя можно увеличить вверх до от номинальной и уменьшать в раз от номинальной.
Верхний предел скорости ограничивается механической прочностью ротора, нижний – особенностями роботы преобразователей частоты.В настоящее время наиболее целесообразно применение тиранзисторных преобразователей частоты, в которых происходит сначала выпрямление переменного тока частоты сети, а затем инвертирование в переменный ток нужной частоты.
Для сохранения постоянной (неизменной) перегрузочной способности двигателя на всех скоростях и поддержания постоянных значений КПД и , одновременно с изменением частоты тока, необходимо изменять напряжение, подводимое к двигателю.
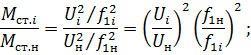
Перегрузочная способность лвигателя не будет изменяться при изменении частоты тока статора, если отношение критических моментов двигателя при всех частотах тока и соответствующих напряжениях будет равно отношению соответствующих статических моментов нагрузки .
(16-12)
Подставим в уравнение (16-12) значения критических моментов из известного ранее соотношения:
И получим:
После преобразования получим (1-3):
Где : – статические моменты при скоростях, соответствующих частотам и ;
и напряжения при тех же частотах тока статора.
Из уравнения (16-13) следует, что с изменением частоты нужно так же изменить и величину подводимого к двигателю напряжения . Т.е. для каждой частоты необходимо соответствующее этой частоте напряжение .
Закон изменения напряжения определяется характером зависимости статического момента от скорости.
Если пренебречь моментом холостого хода рабочего механизма, то уравнение статического момента можно записать в виде
Подставив значения статических моментов (16-14) в уравнение (16-13) получим
(16-15)
откуда
где : – относительная частота напряжения, подаваемого на статор двигателя;
– показатель степени, определяющий закон изменения напряжения с изменением частоты тока статора.
С изменением частоты тока будут изменяться синхронная скорость поля статора и индуктивные сопротивления обмоток двигателя.
Двигатель будет развивать критический момент при критическом скольжении для данной частоты тока
Рассмотрим регулирование напряжения для наиболее распространенных законов изменения нагрузки.

 =
=  UЛ Iн
UЛ Iн  =
=  (1-s) Mтр. = Pтр./ωтр. (16-6)
(1-s) Mтр. = Pтр./ωтр. (16-6) UЛ Iн
UЛ Iн  (16-7)
(16-7) UЛ Iн
UЛ Iн  =
=  UЛ Iн
UЛ Iн  (1-s) =
(1-s) =  (1-s)
(1-s)  = 2ωтр., (16-9)
= 2ωтр., (16-9) = 0,58 М
= 0,58 М  ).
). ток статора приводит к изменению угловой скорости поля статора
ток статора приводит к изменению угловой скорости поля статора 


 от номинальной и уменьшать в
от номинальной и уменьшать в  раз от номинальной.
раз от номинальной. , одновременно с изменением частоты тока, необходимо изменять напряжение, подводимое к двигателю.
, одновременно с изменением частоты тока, необходимо изменять напряжение, подводимое к двигателю. при всех частотах тока
при всех частотах тока  и соответствующих напряжениях
и соответствующих напряжениях  будет равно отношению соответствующих статических моментов нагрузки
будет равно отношению соответствующих статических моментов нагрузки  .
. (16-12)
(16-12)

 – статические моменты при скоростях, соответствующих частотам
– статические моменты при скоростях, соответствующих частотам  и
и  ;
; напряжения при тех же частотах тока статора.
напряжения при тех же частотах тока статора. необходимо соответствующее этой частоте напряжение
необходимо соответствующее этой частоте напряжение 
 (16-15)
(16-15)
 – относительная частота напряжения, подаваемого на статор двигателя;
– относительная частота напряжения, подаваемого на статор двигателя; – показатель степени, определяющий закон изменения напряжения с изменением частоты тока статора.
– показатель степени, определяющий закон изменения напряжения с изменением частоты тока статора.