Регулятор выполняет вычисление рассогласования и его преобразование в управляющее воздействие в соответствии с определенной математической операцией. ВСАУ используются в основном следующие типы регуляторов: пропорциональный (П), интегральный (И), пропорционально-интегральный (ПИ), пропорционально-интегрально-дифференциальный (ПИД). В зависимости от вида преобразуемых сигналов различают аналоговые и цифровые регуляторы. Аналоговые регуляторы (АР) реализуются на основе операционных усилителей, цифровые — на основе специализированных вычислительных устройств или микропроцессоров. Аналоговые регуляторы преобразуют только аналоговые сигналы, являющиеся непрерывными функциями времени. При прохождении через АР преобразуется каждое мгновенное значение непрерывного сигнала.
Для реализации АР операционный усилитель (ОУ) включается по схеме суммирующего усилителя с отрицательной обратной связью. Тип регулятора и его передаточная функция определяются схемой включения резисторов и конденсаторов в цепях на входе и в обратной связи ОУ.
При анализе регуляторов воспользуемся двумя основными допущениями, которые с высокой степенью точности выполняются для ОУ с отрицательной обратной связью в линейном режиме работы:
• дифференциальное входное напряжение UвхОУ равно нулю;
• инвертирующий и неинвертирующий входы ОУ тока не потребляют, т.е. входные токи (рис. 2.2). Так как неинвертирующий вход подключен к шине «нуль», то, согласно первому допущению, потенциал φа инвертирующего входа также равен нулю.
Перейдя к приращению переменных в уравнении (2.1) и использовав преобразование Лапласа, получим передаточную функцию П-регулятора:
где — коэффициент пропорционального усиления.
Таким образом, в П-регуляторе осуществляется пропорциональноеусиление (умножение на постоянную )сигнала рассогласования uрас.
Коэффициент может быть как больше, так и меньше единицы. На рис. 2.3 представлена зависимость uу = f(t) П-регулятора при изменении сигнала рассогласования uрас.
Интегральный регулятор (И-регулятор) реализуется при включении в цепь обратной связи ОУ конденсатора СОУ (рис. 2.4). Передаточная функция И-регулятора
В И-регуляторе осуществляется интегрирование сигнала рассогласования uрас.
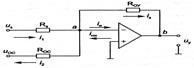
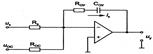
Пропорционально-интегральный регулятор (ПИ-регулятор) реализуется включением в обратную связь резистора Rоу и конденсатора СОУ (рис. 2.6).
Рис. 2.6. Функциональная схема ПИ-регулятора
Передаточная функция ПИ-регулятора
является суммой передаточных функций пропорционального и интегрального регуляторов. Так как ПИ-регулятор обладает свойствами П- и И-регуляторов, то он осуществляет одновременно пропорциональное усиление и интегрирование сигнала рассогласования uрас.
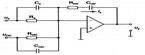
Пропорционально-интегрально-дифференциальный регулятор (ПИД-регулятор) реализуется в простейшем случае включением в ПИ-регуляторе параллельно резисторам R3 и ROC конденсаторов С3 и СОС (рис. 2.8).
Передаточная функция ПИД-регулятора является суммой передаточных функций пропорционального, интегрального и дифференциального регуляторов. ПИД-регулятор осуществляет одновременно пропорциональное усиление, дифференцирование и интегрирование сигнала рассогласования uрас.
17Вопрос Датчики координат АЭП.
Структурная схема датчика.В АЭП (автоматизированный электропривод) для получения сигналов обратной связи по управляемым координатам используются датчики.Датчик представляет собой устройство, информирующее о состоянии управляемой координаты АЭП путем взаимодействия с ней и преобразования реакции на это взаимодействие в электрический сигнал.
Управляемыми в АЭП являются электрические и механические координаты: ток, напряжение, ЭДС, момент, скорость, перемещение и т.д. Для их измерения используют соответствующие датчики.
Датчик координат АЭП структурно может быть представлен в виде последовательного соединения измерительного преобразователя (ИП) и согласующего устройства (СУ) (рис. 2.9). Измерительный преобразователь преобразует координату хв электрический сигнал напряжения и(или тока i), пропорциональный х.Согласующее устройство осуществляет преобразование выходного сигнала иИП в сигнал обратной связи uОС, который по величине и форме удовлетворяет САУ.
Рис. 2.9. Структурная схема датчика координат АЭП
Датчики тока.Датчики тока (ДТ) предназначены для получения информации о силе и направлении тока двигателя. К ним предъявляют следующие требования:
• линейность характеристики управления в диапазоне от 0,1Iном до 5 Iномне менее 0,9;
• наличие гальванической развязки силовой цепи и системы управления;
• высокое быстродействие.
В качестве измерительных преобразователей в ДТ используются трансформаторы тока, дополнительные (компенсационные) обмотки сглаживающих дросселей, элементы Холла, шунты.
Широкое распространение для измерения тока двигателей получили датчики тока на основе шунтов. Шунт представляет собой четырехзажимный резистор с чисто активным сопротивлением Rш(безындуктивный шунт), к токовым зажимам которого подключается силовая цепь, а к потенциальным — измерительная.
По закону Ома падение напряжения на активном сопротивлении и=Rшi.
Для ослабления влияния шунта на прохождение тока в цепи двигателя его сопротивление должно быть минимальным. Номинальное падение напряжения на шунте составляет обычно 75 мВ, поэтому его необходимо усилить до требуемых значений (3,0...3,5 В). Так как шунт имеет потенциальную связь с силовой цепью, датчик тока должен содержать устройство гальванической развязки. В качестве таких устройств применяются трансформаторные и оптоэлектронные устройства. Структурная схема датчика тока на основе шунта приведена на рис. 2.13.
Рис. 2.13. Структурная схема датчика тока на основе шунта
В настоящее время все большее распространение получают датчики тока на основе элементов Холла, которые выполняются из полупроводникового материала в виде тонкой пластинки или пленки (рис. 2.14). При прохождении электрического тока IХ по пластинке, расположенной перпендикулярно к магнитному полю с индукцией В, в пластинке наводится ЭДС Холла eХ:
,
где — коэффициент, зависящий от свойств материала и размеров пластинки.
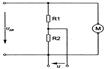
Датчики напряжения. Вкачестве измерительного преобразователя напряжения в электроприводе используются резистивные делители напряжения (рис. 2.16).
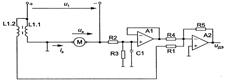
Датчики ЭДС.При невысоких требованиях к диапазону регулированияскорости (до 50) в качестве главной обратной связи в электроприводе применяется обратная связь по ЭДС.
Рис. 2.17. Функциональная схема датчика ЭДС якоря
Датчики скорости.Для получения электрического сигнала, пропорционального угловой скорости ротора двигателя, используются тахогенераторы и импульсные датчики скорости. Тахогенераторы применяются в аналоговых САУ, импульсные — в цифровых.
К датчикам скорости предъявляются жесткие требования по линейности характеристики управления, стабильности выходного напряжения и уровню его пульсаций, так как они определяют статические и динамические параметры привода в целом.
Широкое распространение в электроприводе получили тахогенераторы постоянного тока с постоянными магнитами. Для уменьшения уровня оборотных пульсаций тахогенераторы встраиваются в электродвигатель.
В импульсных датчиках скорости в качестве первичного измерительного преобразователя используются импульсные преобразователи перемещения, у которых количество импульсов пропорционально углу поворота вала.
Датчики положения. Внастоящее время в электроприводе для измерения пермещения подвижных частей машин и механизмов применяются индукционные и фотоэлектронные преобразователи.
К индукционным относятся вращающиеся трансформаторы, сельсины и индуктосины. Индуктосины могут быть круговыми и линейными.
Вращающимися трансформаторами (ВТ)называются электрические микромашины переменного тока, преобразующие угол поворота α в синусоидальное напряжение, пропорциональное этому углу. В системе автоматического регулирования вращающиеся трансформаторы используются в качестве измерителей рассогласования, фиксирующих отклонение системы от некоторого заданного положения.
Вращающийся трансформатор имеет на статоре и роторе по две одинаковые однофазные распределенные обмотки, сдвинутые между собой на 90°. Напряжение с обмотки ротора снимается с помощью контактных колец и щеток или с помощью кольцевых трансформаторов.
Принцип действия ВТ в синусном режиме основан на зависимости напряжения, наведенного в обмотке ротора пульсирующим магнитным потоком статора, от углового положения осей обмоток статора и ротора.
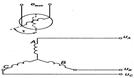
Сельсин представляет собой электрическую микромашину переменного тока, имеющую две обмотки: возбуждения и синхронизации. В зависимости от числа фаз обмотки возбуждения различают одно- и трехфазные сельсины. Обмотка синхронизации всегда трехфазная. В САУ широкое распространение получили бесконтактные сельсины с кольцевым трансформатором.
Обмотка синхронизации бесконтактного сельсина с кольцевым трансформатором размещается в пазах статора, обмотка возбуждения — в пазах или на явно выраженных полюсах ротора сельсина. Особенность кольцевого трансформатора состоит в том, что его первичная обмотка располагается на статоре, а вторичная — на роторе. Обмотки имеют вид колец, размещенных в магнитной системе, состоящей из кольцевых магнитопроводов статора и ротора, которые на роторе соединяются внутренним магнитопроводом, а на статоре — внешним. В САУ сельсины используются в амплитудном и фазовращательном режимах.
Схема включения обмоток сельсина в амплитудном режиме представлена на рис. 2.19. Входной координатой сельсина в этом режиме является угол поворота ротора τ. За начало отсчета принята осевая линия обмотки фазы А.
Рис. 2.19. Функциональная схема включения обмоток сельсина в амплитудном режиме
Схема включения обмоток сельсина в фазовращательном режиме представлена на рис. 2,20. Входной координатой сельсина в этом режиме является угол поворота τ, а выходной — фаза φ выходной ЭДС евыхпо отношению к переменному питающему напряжению.
Рис. 2.20. Функциональная схема включения обмоток сельсина в фазовращательном режиме
18Вопрос Системы импульсно-фазового управления. Принципы управления тиристорами.
В выпрямителях в качестве управляемых ключей используются тиристоры. Для открывания тиристора необходимо выполнение двух условий:
• потенциал анода должен превышать потенциал катода;
• на управляющий электрод необходимо подать открывающий (управляющий) импульс.
Момент появления положительного напряжения между анодом и катодом тиристора называется моментом естественного открывания. Подача открывающего импульса может быть задержана относительно момента естественного открывания на угол открывания. Вследствие этого задерживается начало прохождения тока через вступающий в работу тиристор и регулируется напряжение выпрямителя.
Для управления тиристорами выпрямителя используется система импульсно-фазового управления (СИФУ), выполняющая следующие функции:
• определение моментов времени, в которые должны открываться те или иные конкретные тиристоры; эти моменты времени задаются сигналом управления, который поступает с выхода САУ на вход СИФУ;
• формирование открывающих импульсов, передаваемых Iв нужные моменты времени на управляющие электроды тиристоров и имеющих требуемые амплитуду, мощность и длительность.
По способу получения сдвига открывающих импульсов относительно точки естественного открывания различают горизонтальный, вертикальный и интегрирующий принципы управления.
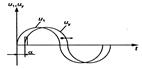
При горизонтальном управлении (рис. 2.28) управляющее переменное синусоидальное напряжение uy сдвигается по фазе (по горизонтали) по отношению к напряжению u1, питающему выпрямитель. В момент времени ωt=α из управляющего напряжения формируются прямоугольные отпирающие импульсы Ugt.Горизонтальное управление в электроприводах практически не применяется, что обусловлено ограниченным диапазоном регулирования угла α (около 120°).
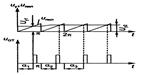
При вертикальном управлении (рис. 2.29) момент подачи открывающихся импульсов определяется при равенстве управляющего напряжения uy (постоянного по форме) с переменным опорным напряжением (по вертикали). В момент равенства напряжений формируются прямоугольные импульсы Ugt.
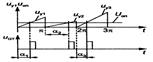
При интегрирующем управлении (рис. 2.30) момент подачи открывающих импульсов определяется при равенстве переменного управляющего напряжения иус постоянным опорным напряжением Uoп.В момент равенства напряжений формируются прямоугольные импульсы Ugt.
Рис. 2.28. Горизонтальный принцип управления
Рис. 2.29. Вертикальный принцип управления
Рис. 2.30. Интегрирующий принцип управления
По способу отсчета угла открывания а СИФУ делят на многоканальные и одноканальные. В многоканальных СИФУ отсчет угла а для каждого тиристора выпрямителя производится в собственном канале, в одноканальных — в одном канале для всех тиристоров. В промышленном электроприводе преимущественное применение получили многоканальные СИФУ с вертикальным принципом управления.

 — коэффициент пропорционального усиления.
— коэффициент пропорционального усиления.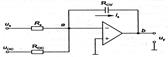
 .
.

 ,
, — коэффициент, зависящий от свойств материала и размеров пластинки.
— коэффициент, зависящий от свойств материала и размеров пластинки.