Вентильные двигатели – электрические машины, функционально объединенные с управляемым полупроводниковым коммутатором. Они близки по конструктивным признакам и характеристикам к коллекторным двигателям. Вентильные двигатели имеют частоту вращения вала, не зависящую от частоты сети, регулирование частоты вращения осуществляется путем изменения потока возбуждения и тока в якоре. Вентильные двигатели обладают высоким пусковым моментом и хорошими энергетическими показателями. Благодаря отсутствию коллекторно-щеточного узла вентильные двигатели имеют большую надежность и долговечность.
Вентильные двигатели, как и коллекторные, имеют широкое разнообразие конструкций и схем включения обмоток.
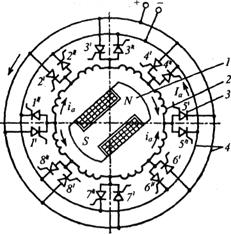
На рис. 1 представлена схема вентильного двигателя, который имеет такую же обмотку якоря, как и машина постоянного тока. На роторе вентильного двигателя 1 расположена обмотка возбуждения или постоянные магниты. В пазах статора располагается многофазная обмотка якоря 2, секции или группа секций которой присоединены через полупроводниковые блоки 3 к распределительным шинам 4 и сети.
В положении, показанном на рис. 1, открыты тиристоры 1' и 5". Ток якоря Iя в обмотке статора проходит по двум параллельным ветвям и создается вращающий момент. При движении ротора происходит переключение тиристоров датчиками положения ротора.
При повороте ротора по часовой стрелке на угол 360/m, где m — число отпаек (фаз) обмотки якоря (в рассматриваемой машине m = 8) происходит переключение тиристоров. Включаются тиристоры 2' и 6", а 1' и 5" — отключаются и т.д.
Таким образом, при вращении ротора вращается и поле якоря. При этом происходит электромеханическое преобразование энергии.
При реверсе работают пары тиристоров: 1" и 5', 2" и 6' и т.д. Включение и отключение тиристоров осуществляется путем подачи импульсов напряжения со специальных датчиков, реагирующих на положение ротора.
+ U- Коммутатор по схеме рис. 1 получается громоздким и вентильные двигатели по этой схеме практически не применяются. Чтобы упростить коммутатор, надо уменьшить число фаз машины.
Простейшей схемой вентильного двигателя является двухфазная схема, но наибольшее применение нашла трехфазная схема (рис. 2). В этой схеме вентильная коммутация осуществляется трехфазным инвертором.
Система вентильной коммутации обычно состоит из датчика синхронизирующих сигналов, системы формирования сигналов управления и управляемого коммутатора.
Датчик синхронизирующих сигналов задает порядок и частоту переключения элементов коммутатора. При позиционном управлении — это датчик положения ротора, а при фазовом — датчик фазы напряжения якорной обмотки. Датчик положения ротора представляет собой встроенный в машину узел, состоящий из чувствительных элементов, закрепленных на статоре, и сигнальных элементов, закрепленных на роторе. Обычно используются фотоэлектрические или магнитомодуляционные датчики.
Система формирования сигналов управления обеспечивает усиление и формирование синхронизирующих сигналов.
Управляемый коммутатор осуществляет бесконтактные переключения в силовых цепях вентильного двигателя. Управляемый коммутатор выполняется на полупроводниковых приборах или других переключающих элементах, например герконах.
В управляемых коммутаторах на полупроводниковых приборах используются полностью управляемые приборы (транзисторы, двухоперационные тиристоры) и не полностью управляемые (тиристоры, семисторы).
По способу коммутации управляемые коммутаторы на не полностью управляемых полупроводниковых приборах можно разделить на три вида: с естественной, принудительной и смешанной коммутацией. При естественной коммутации переключения происходят под действием ЭДС якорной обмотки. При принудительной коммутации управление тиристорами осуществляется под действием коммутирующего напряжения отдельного источника либо напряжения питающей сети. При смешанной коммутации имеет место комбинация первого и второго способов.
Вентильные двигатели могут питаться от сети как постоянного, так и переменного тока. Если управляемый коммутатор питается от сети постоянного тока, то он представляет собой инвертор — преобразователь постоянного тока в переменный. Если управляемый коммутатор подключен к сети переменного тока, то он выполняет функции преобразователя частоты.
Электромеханическая часть вентильных двигателей постоянного тока, как правило, аналогична известным конструктивным модификациям синхронных машин. Для маломощных приводов используются двигатели с постоянными магнитами, а также гистерезисные, реактивные и индукторные двигатели. В приводах средней и большой мощности используются двигатели с электромагнитным возбуждением.
Характерной особенностью вентильных двигателей, отличающей их от двигателей постоянного тока, является наличие дополнительного канала управления по углу синхронизации инвертора. Этот канал используется для обеспечения необходимой жесткости механической характеристики и достижения большей перегрузочной способности.
Вентильные двигатели применяются и в приводах небольшой мощности, где нежелательно применение механического коммутатора (проигрыватели, приборы магнитной записи и др.).
Вентильные двигатели большой мощности нашли применение там, где ранее использовались нерегулируемые асинхронные или синхронные двигатели. Выполнены вентильные двигатели мощностью 1600 кВт с регулированием частоты вращения для привода компрессоров холодильных машин и насосов циркуляционных систем.
Ротором выступает постоянный магнит.
Обозначение диодов VD1…VD6.
ДП – датчик положения.
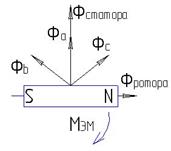
Коммутатор всегда включает VT1…VT6 так, чтобы магнитный поток статора был перпендикулярен магнитному потоку ротора, подобно тому, как это делается в ДПТ с помощью механического коммутатора.
При включенных VT2, VT3, VT4 диаграмма потоков такая:
При Uип=0 двигатель не будет развивать момента, по мере увеличения напряжения будут увеличиваться и токи.
Механические характеристики такого двигателя такие же, как и у ДПТ.

 Вентильные двигатели – электрические машины, функционально объединенные с управляемым полупроводниковым коммутатором. Они близки по конструктивным признакам и характеристикам к коллекторным двигателям. Вентильные двигатели имеют частоту вращения вала, не зависящую от частоты сети, регулирование частоты вращения осуществляется путем изменения потока возбуждения и тока в якоре. Вентильные двигатели обладают высоким пусковым моментом и хорошими энергетическими показателями. Благодаря отсутствию коллекторно-щеточного узла вентильные двигатели имеют большую надежность и долговечность.
Вентильные двигатели – электрические машины, функционально объединенные с управляемым полупроводниковым коммутатором. Они близки по конструктивным признакам и характеристикам к коллекторным двигателям. Вентильные двигатели имеют частоту вращения вала, не зависящую от частоты сети, регулирование частоты вращения осуществляется путем изменения потока возбуждения и тока в якоре. Вентильные двигатели обладают высоким пусковым моментом и хорошими энергетическими показателями. Благодаря отсутствию коллекторно-щеточного узла вентильные двигатели имеют большую надежность и долговечность. Вентильные двигатели, как и коллекторные, имеют широкое разнообразие конструкций и схем включения обмоток.
Вентильные двигатели, как и коллекторные, имеют широкое разнообразие конструкций и схем включения обмоток.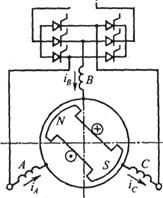 + U - Коммутатор по схеме рис. 1 получается громоздким и вентильные двигатели по этой схеме практически не применяются. Чтобы упростить коммутатор, надо уменьшить число фаз машины.
+ U - Коммутатор по схеме рис. 1 получается громоздким и вентильные двигатели по этой схеме практически не применяются. Чтобы упростить коммутатор, надо уменьшить число фаз машины. Датчик синхронизирующих сигналов задает порядок и частоту переключения элементов коммутатора. При позиционном управлении — это датчик положения ротора, а при фазовом — датчик фазы напряжения якорной обмотки. Датчик положения ротора представляет собой встроенный в машину узел, состоящий из чувствительных элементов, закрепленных на статоре, и сигнальных элементов, закрепленных на роторе. Обычно используются фотоэлектрические или магнитомодуляционные датчики.
Датчик синхронизирующих сигналов задает порядок и частоту переключения элементов коммутатора. При позиционном управлении — это датчик положения ротора, а при фазовом — датчик фазы напряжения якорной обмотки. Датчик положения ротора представляет собой встроенный в машину узел, состоящий из чувствительных элементов, закрепленных на статоре, и сигнальных элементов, закрепленных на роторе. Обычно используются фотоэлектрические или магнитомодуляционные датчики. Вентильные двигатели большой мощности нашли применение там, где ранее использовались нерегулируемые асинхронные или синхронные двигатели. Выполнены вентильные двигатели мощностью 1600 кВт с регулированием частоты вращения для привода компрессоров холодильных машин и насосов циркуляционных систем.
Вентильные двигатели большой мощности нашли применение там, где ранее использовались нерегулируемые асинхронные или синхронные двигатели. Выполнены вентильные двигатели мощностью 1600 кВт с регулированием частоты вращения для привода компрессоров холодильных машин и насосов циркуляционных систем.

 При Uип=0 двигатель не будет развивать момента, по мере увеличения напряжения будут увеличиваться и токи.
При Uип=0 двигатель не будет развивать момента, по мере увеличения напряжения будут увеличиваться и токи.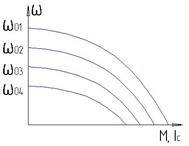 w01>w02>w03>w04
w01>w02>w03>w04