 Динамическое торможение осуществляется чаще всего при переключении на ходу обмотки статора от источника переменного тока на источник постоянного тока.
Динамическое торможение осуществляется чаще всего при переключении на ходу обмотки статора от источника переменного тока на источник постоянного тока.
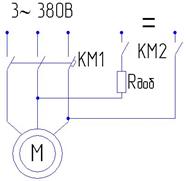
Размыкание КМ1 отключает двигатель от сети; замыкание КМ2 – подача постоянного тока в обмотку.

На постоянном токе  и
и  , что много меньше
, что много меньше  от переменного тока.
от переменного тока.
Поэтому необходимо Rдоб, которое дает  .
.
Контакторы КМ1 и КМ2 должны работать с разнесением по времени. Многие отечественные станки этого не предусматривают, что приводит к выгоранию контактора.
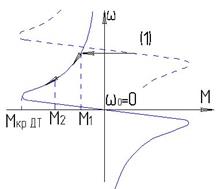
Механические характеристики режима ДТ:
 Þ
Þ 
МкрДТ>>Мном, что приводит к отрицательным механическим явлениям.
М1<М2<...
ДТ существует, пока есть постоянный ток в цепи статора Þ ток необходимо выключать после остановки двигателя. Это приводит к тому, что, не желая связываться с контролем скорости, постоянный ток управляется функцией времени.
За рубежом под ДТ понимается другое: инверторное торможение, которое по энергетике совпадает с РТ, например при снижении частоты.
У большинства станочных приводов нет возврата энергии в сеть (рекуператора) Þ энергия из звена постоянного тока рассеивается на специальном тормозном сопротивлении.
Энергия при ДТ выделяется в роторе Þ при частых торможениях возможен перегрев двигателя с обрывом стержней ротора Þ для такой работы режим лучше не использовать.
