. Торможение с отдачей энергии в сеть (генераторный режим работы параллельно с сетью) осуществляется в том случае, когда скорость двигателя оказывается выше скорости идеального холостого хода и его ЭДС Ебольше приложенного напряжения U. Двигатель здесь работает в режиме генератора параллельно с сетью, которой он отдает электрическую энергию; ток при этом изменяет свое направление. Последнее очевидно из равенства
следовательно, изменяет знак и момент двигателя, т. е. он становится тормозным . Если обозначить тормозной момент через Мт = -М, то
Первый член в правой части уравнения показывает, что механическая характеристика двигателя независимого возбуждения в этом генераторном режиме при М = 0 проходит через точку, соответствующую угловой скорости идеального холостого хода, как и в случае двигательного режима. Наклон (жесткость) механической характеристики определяется сомножителем второго члена уравнения , который по абсолютному значению (при заданном сопротивлении R) остается неизменным. Следовательно, наклон механической характеристики в рассматриваемом генераторном режиме будет таким же, как и в двигательном. Поэтому графически механические характеристики двигателя в режиме торможения с отдачей энергии в сеть являются продолжением характеристик двигательного режима в область квадранта ΙΙ. Этот способ торможения возможен, например, в приводах транспортных и подъемных механизмов при спуске груза и при некоторых способах регулирования скорости, когда двигатель, переходя к низшим скоростям, проходит значения . Такое торможение является весьма экономичным, поскольку оно сопровождается отдачей в сеть электрической энергии (за вычетом потерь в двигателе), которую двигатель преобразует из механической, поступающей к нему с вала. Но торможение этим способом может быть осуществлено в ограниченных пределах, так как не во всех приводах возможно соблюдение условия
Необходимо отметить, что чем больше сопротивление в якорной цепи двигателя, тем выше его угловая скорость в генераторном режиме работы параллельно с сетью при том же тормозном моменте
Условием получения РТ является изменение знака ток, путем:
снижения Uя (изменением других механических характеристик);
увеличения Едв (за счет изменения знака момента нагрузки).
При наличии управляющего источника питания несложно организовать автоматическую систему, следящую за Iя, и переводящую двигатель на все более низкие характеристики по мере снижения скорости двигателя.
2.8.2. Динамическое торможение (ДТ)
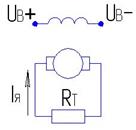
Динамическое торможение происходит при отключении якоря двигателя от сети и замыкании его на резистор, поэтому иногда его называют реостатным торможением. Обмотка возбуждения при этом должна оставаться присоединенной к сети. Режим динамического торможения также соответствует работе машины в качестве генератора. Однако этот режим отличается от описанного выше торможения с отдачей энергии в сеть. При динамическом торможении, так же как и в предыдущем случае, механическая энергия, поступающая с вала, например, в виде кинетической энергии, запасенной вдвигателе и в движущихся элементах приводимого им механизма, преобразуется в электрическую. Однако эта энергия не отдается в сеть, а выделяется в виде теплоты в сопротивлениях цепи якоря.
Вследствие того, что ЭДС двигателя сохраняет при торможении такой же знак, как и в двигательном режиме, а напряжение извне к якорю не прикладывается, ток якоря определяется по формуле
Iя = -E/Rя,
где R — сопротивление якорной цепи.
Тормозной момент при динамическом торможении, если пренебречь реакцией якоря, может быть выражен равенством:
Динамическое торможение широко используется для останова привода при отключениях его от сети (особенно при реактивном характере момента), при спуске грузов в подъемных механизмах. Оно достаточно экономично, хотя и уступает в этом отношении торможению с отдачей энергии в сеть.

 . Если обозначить тормозной момент через Мт = -М, то
. Если обозначить тормозной момент через Мт = -М, то
 , который по абсолютному значению (при заданном сопротивлении R) остается неизменным. Следовательно, наклон механической характеристики в рассматриваемом генераторном режиме будет таким же, как и в двигательном. Поэтому графически механические характеристики двигателя в режиме торможения с отдачей энергии в сеть являются продолжением характеристик двигательного режима в область квадранта ΙΙ. Этот способ торможения возможен, например, в приводах транспортных и подъемных механизмов при спуске груза и при некоторых способах регулирования скорости, когда двигатель, переходя к низшим скоростям, проходит значения
, который по абсолютному значению (при заданном сопротивлении R) остается неизменным. Следовательно, наклон механической характеристики в рассматриваемом генераторном режиме будет таким же, как и в двигательном. Поэтому графически механические характеристики двигателя в режиме торможения с отдачей энергии в сеть являются продолжением характеристик двигательного режима в область квадранта ΙΙ. Этот способ торможения возможен, например, в приводах транспортных и подъемных механизмов при спуске груза и при некоторых способах регулирования скорости, когда двигатель, переходя к низшим скоростям, проходит значения  . Такое торможение является весьма экономичным, поскольку оно сопровождается отдачей в сеть электрической энергии (за вычетом потерь в двигателе), которую двигатель преобразует из механической, поступающей к нему с вала. Но торможение этим способом может быть осуществлено в ограниченных пределах, так как не во всех приводах возможно соблюдение условия
. Такое торможение является весьма экономичным, поскольку оно сопровождается отдачей в сеть электрической энергии (за вычетом потерь в двигателе), которую двигатель преобразует из механической, поступающей к нему с вала. Но торможение этим способом может быть осуществлено в ограниченных пределах, так как не во всех приводах возможно соблюдение условия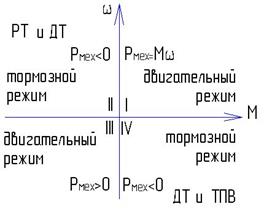
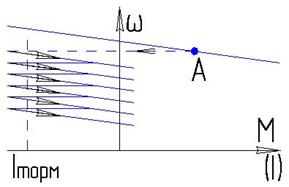 При наличии управляющего источника питания несложно организовать автоматическую систему, следящую за Iя, и переводящую двигатель на все более низкие характеристики по мере снижения скорости двигателя.
При наличии управляющего источника питания несложно организовать автоматическую систему, следящую за Iя, и переводящую двигатель на все более низкие характеристики по мере снижения скорости двигателя.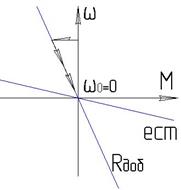
 Динамическое торможение (ДТ)
Динамическое торможение (ДТ)