Рассчитаем характеристики исходя из паспортных данных выбранного двигателя.
Таблица 8 - Технические данные ЭД подачи 1FT6-084-8SF71-1AG1
Параметр
Значение
Nn; мин−1
H; мм
Pn; кВт при ∆T=100 K
6,9
Mo; Нм при ∆T=100 K
K перегрузочная способность
Mn; Нм при ∆T=100 K
In; A при ∆T=100 K
Количество пар полюсов
Момент инерции ротора (без тормоза) J; 10−4 кгм2
Вес кг
Расчет синхронного двигателя привода подачи [5].
Рассмотрим параметры канала регулирования скорости:
1 Передаточная функция датчика тока по оси Z:
- номинальный сигнал задания РТ:
- индуктивность ротора:
(3.21)
где X2=0.28
- индуктивность статора:
(3.22)
где X1=0.31
- коэффициент рассеивания магнитных полей статора и ротора:
- число пар полюсов:
(3.23)
- взаимная индуктивность между статором и ротором:
(3.24)
- номинальная частота вращения ротора:
(2.19)
- номинальный момент:
- коэффициент трансформации:
- номинальное потокосцепление:
(3.25)
- проекция номинального тока на ось Z:
(3.26)
- перегрузочная способность:
- коэффициент датчика тока:
(3.27)
2 Передаточная функция регулятора тока:
- статический коэффициент передачи ЧП:
(3.28)
- некомпенсированная постоянная времени:
(3.29)
где R1=0,18 статорное сопротивление R2=0,32 роторное активное сопротивление
- постоянная времени статора:
(3.30)
- коэффициент передачи пропорциональной части ПИ-регулятора:
(3.31)
- постоянная времени регулятора:
(3.32)
3 Передаточная функция частотного преобразователя:
- постоянная времени ЧП:
3 Передаточная функция электрической части СД по каналу регулирования тока:
- постоянная времени ПФ электрической части СД:
(3.33)
,
4 Передаточная функция механической части двигателя:
- маховый момент ротора двигателя;
(3.34)
5 Передаточная функция ПИ-регулятора скорости:
- коэффициент обратной связи по скорости:
- коэффициент передачи регулятора скорости:
(2.30)
- постоянная времени интегрирующей части ПИ-регулятора:
(3.35)
6 Передаточная функция датчика скорости
- коэффициент обратной связи по скорости:
Канал регулирования потокосцепления Ψ2
7 Передаточная функция канала ОС по току I1x:
- постоянная времени ротора:
(3.36)
(2.33)
- коэффициент передачи звена:
8 Передаточная функция ПИ-регулятора тока I1x:
- коэффициент передачи пропорциональной части ПИ-регулятора:
(3.37)
- постоянная времени интегрирующей части ПИ-регулятора, с
(3.38)
9 Передаточная функция цепи обратной связи по потокосцеплению:
- коэффициент передачи звена:
10 Передаточная функция регулятора потокосцепления:
- постоянная времени регулятора:
- коэффициент передачи пропорциональной части ПИ-регулятора:
(3.39)
- постоянная времени ПИ-регулятора потокосцепления:
(3.40)
11 Передаточная функция электрической части двигателя по каналу регулирования тока i1x:
- коэффициент передачи звена:
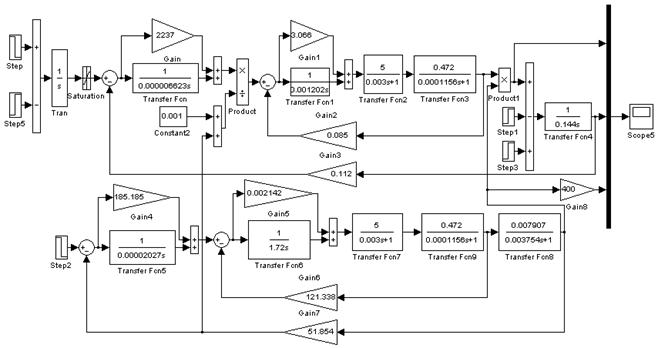
На основании принципиальной схемы было произведено разделение электромеханической системы на звенья направленного действия. Эти звенья – электродвигатель, получающий энергию от преобразователя, регуляторы тока и скорости и цепи обратных связей с соответствующими коэффициентами передач.
Для управления электродвигателями с максимальным током равным 15 А выбираем IGBT – транзисторы типа IRG4BC30KD его технические параметры:
- максимальное напряжение кэ, В 360;
- максимальный ток кэ, A 18;
- управляющее напряжение, В 2.5;
- мощность макс., Вт 200;
- температурный диапазон, С -40...175.
Рисунок 3.15 - Структурная схема привода
Для обеспечения управляющего напряжения в 2,5 В. В цепь между микроконтроллером и транзистором необходимо включить резистор.
Расчет резистора R4
, (3.41)
где Uб – управляющее напряжение базы транзистора
В качестве резистора R4 выбираем С1-4 0,25Вт, 5% 120 Ом
Номиналы резисторов R4 и R5 идентичны.
Расчет датчика тока
Для контроля над током, протекающим через электродвигатель, в цепь его питания вводим резистор R6. Напряжение, снимающееся с этого резистора, поступает на один из входов микроконтроллера, по повышению уровня этого напряжения контроллер прекращает подачу питания на электродвигатель.
Сопротивление рассчитывается по формуле
, (3.42)
где Imax – максимальный ток электродвигателя;
Uл1 – напряжение логической единицы.
Так как минимальный номинал резисторов начинается от 1 Ома, то придется ввести в схему несколько параллельно соединенных резисторов. Это необходимо для получения эквивалентного сопротивления, величину которого можно подобрать близкой по значению к посчитанному ранее.
Взяв за основу три резистора с минимальным возможным сопротивлением равным 1 Ом, рассчитаем эквивалентное сопротивление Rэкв
. (3.43)
Получим
.
Сопротивление равное 0,33 Ома вполне подходит для стабильной работы схемы. Поэтому в качестве резисторов R6 выбираем SMD резистор ЧИП РЕЗ 0,5Вт, 5% 1 Ом.
На принципиальной схеме параллельное включение резисторов условно заменено одним резистором R6.
Расчет площади радиатора выходных транзисторных ключей
Площадь радиатора выходных транзисторных ключей рассчитывается по формуле
, (3.44)
где tmax – максимальная температура транзистора;
tокр – температура окружающей среды;
Pvt – мощность транзистора;
Rt – тепловое сопротивление.
Получим
.
Радиаторы устанавливаются на каждый транзистор.
Рисунок 3.16 – Разработанная схема управления приводом подачи


 (3.21)
(3.21)
 (3.22)
(3.22)

 (3.23)
(3.23)
 (3.24)
(3.24)
 (2.19)
(2.19)

 (3.25)
(3.25)
 (3.26)
(3.26)

 (3.27)
(3.27)
 (3.28)
(3.28)

 (3.29)
(3.29)
 (3.30)
(3.30)

 (3.31)
(3.31)
 (3.32)
(3.32)

 (3.33)
(3.33)

 ,
, 
 - маховый момент ротора двигателя;
- маховый момент ротора двигателя; (3.34)
(3.34)
 (2.30)
(2.30)
 (3.35)
(3.35)


 (3.36)
(3.36)
 (2.33)
(2.33)

 (3.37)
(3.37)
 (3.38)
(3.38)


 (3.39)
(3.39)
 (3.40)
(3.40)
 , (3.41)
, (3.41) , (3.42)
, (3.42) . (3.43)
. (3.43) .
. , (3.44)
, (3.44) .
.