Если известны передаточная функция замкнутой импульсной системы (п. 4.1), то как было показано в п. 2.2. условием устойчивости этой системы является, чтобы все корни характеристического уравнения
(п. 5.1)
были по модулю меньше единицы
Если хоть один корень уравнения (п. 5.1) будет , то системы находится на границе устойчивости, а если , то система неустойчива.
а) б)
Рис. п.5.1 Комплексные плоскости расположения корней характеристического уравнения импульсной системы
а) z-плоскость; б) w-плоскость
Как видно из рисунка п. 5.1.а, условием устойчивости импульсной системы является нахождение всех корней характеристического уравнения внутри единичного радиуса комплексной z-плоскости.
Если применить билинейное преобразование переменной z в переменную w с помощью следующего соотношения
, (п. 5.2)
то единичная окружность в комплексной w-плоскости (рис. п. 5.1.б) преобразуется в мнимую ось, а область, ограниченная этой окружностью в левую полуплоскость. Поэтому, заменив в уравнении (п. 5.1) переменную с помощью соотношения (п. 5.2) получим характеристическое уравнений
, (п. 5.3)
корни которого для устойчивой системы будут лежать в левой полуплоскости комплексной w-плоскости.
Это условие относительно переменной w совпадает с условием устойчивости для непрерывных систем управления.
Уравнение (п. 5.3) можно представить следующим образом
.
Раскрыв скобки и приведя подобные члены получим характеристическое уравнение относительно переменной w в каноническом виде
(п. 5.4)
Для этого уравнения в свете вышеизложенного применим критерий устойчивости Рауса-Гурвица.
Рассмотрим конкретные примеры.
Для системы первого порядка (n=1)
или
,
где .
Условие устойчивости определяют, как и
Следовательно
. (п. 5.5)
Из (п. 5.5) следует, что даже при положительных коэффициентах характеристического уравнения первого порядка Д(z) импульсная система может оказаться не устойчивой. Из физики работы системы это объясняется тем, что период квантования по времени может быть таким большим, что вызванное им запаздывание может сделать замкнутую систему неустойчивой.
Для системы второго порядка
,
после подстановки (п. 5.2.)
,
или
. (п. 5.6)
В соответствии с критерием Рауса-Гурвица условия устойчивости также определятся из положительности коэффициентов уравнений (п. 5.6)
.
Для системы третьего порядка имеющей характеристическое уравнение
.
После соответствующих преобразований условия устойчивости определяются из положительности коэффициентов характеристического уравнения Д(w):
и главного минора определителя Гурвица
.
Связь между коэффициентами и определяется по той же методике, что и для систем первого и второго порядков.
Рассмотрим способ определения критических коэффициентов дискретного регулятора. В §1.1 определено, что апериодическому звену первого порядка (1.11) соответствует дискретная передаточная функция
.
В результате обратного Z-преобразования получим следующее разностное уравнение
.
Уравнение свободного движения определяется при u(k)=0
.
Найдем yсв(k) при k = 1,2,3,…
; ; … .
При этом следует, что свободное движение будет стремится к 0 (что является признаком устойчивости объекта), если a1 < 1. Таким же образом можно доказать, что объект или замкнутая система регулирования n-порядка будут устойчивы, если корни характеристического уравнения их дискретных передаточных функций (1.23) будут меньше единицы. Это означает, что на комплексной плоскости все корни характеристического уравнения должны лежать внутри единичной окружности.
Для непрерывной системы условие устойчивости сводится к необходимости нахождения корней характеристического уравнения в левой плоскости. Поэтому, чтобы использовать критерии устойчивости, разработанные для непрерывных систем, для исследования дискретных передаточных функций осуществляют замену переменной Z на w, которые связаны следующей зависимостью
. (2.13)
Такая замена переводит внутренность единичного круга Z-плоскости в левую полуплоскость w. Следовательно, для дискретных передаточных функций относительно переменной w можно применять критерии устойчивости, разработанные для линейных систем.
Рассмотрим определение критического коэффициента дискретного И-регулятора для объекта первого порядка (см. §1.1). Согласно выражению (1.33) характеристическое уравнение замкнутой системы имеет вид
.
Приведя к общему знаменателю и взяв числитель, получим
.
Согласно критерию Гурвица в устойчивой системе второго порядка все коэффициенты должны быть положительны
; ; .
Подставив в первое неравенство выражение для коэффициентов из (1.25) и (1.33) получим
.
Следовательно, критический коэффициент дискретного И-регулятора kИ* определяется выражением
.
Для получения качественных переходных процессов величину kИ нужно уменьшить в 2¸3 раза.
Аналогично находят критические коэффициенты дискретных регуляторов более высокого порядка.
Если частотный спектр непрерывной функции х(t) ограничен частотнымдиапазоном от до то получается, что решетчатый сигнал имеет неограниченный спектр частот по сравнению с ограниченным спектром соответствующего непрерывного сигнала.
Появление эффекта периодически появляющихся боковых спектров поясняется рисунком 1.8, из которого видно, что одной и той же периодической решетчатой функции соответствует бесконечное количество кратных частот. Т.е. импульсный квантователь не фильтрует частоты, а наоборот, при восстановлении непрерывного сигнала из дискретного появляется спектр боковых частот.
А(w)
w
Рис. 1.8. Соответствие сигналам разной частоты
одной и той же решетчатой функции
Для того чтобы из бесконечного периодического спектра выделить спектр непрерывного сигнала и затем однозначно его определить как функцию времени, достаточно пропустить его через идеальный фильтр с диапазоном ±wС
( рис. 1.9).
Но такое восстановление исходной непрерывной функции возможно не во всех случаях. При увеличении периода квантования Т соответствующая ему частота w0 уменьшится, и спектральная характеристика х*(t) примет другой вид. Спектры, соответствующие непрерывной функции х(t), будут накладываться друг на друга.
В этом случае восстановить непрерывный сигнал с помощью идеального фильтра не представляется возможным. Т.е. период квантования выбран слишком велик, что ведет к потере информации.
Из изложенного следует известная теорема Котельникова-Шеннона: для восстановления непрерывного сигнала из его импульсного аналога необходимо, чтобы частота квантования была не меньше удвоенной частоты самой высокой значимой частоты непрерывного сигнала
w0 > 2wC или
Следовательно, если на объект управления действует возмущающее воздействие, спектр которого имеет максимально значимую частоту wЗМ, то для того чтобы цифровая замкнутая система могла нейтрализовать действие такого возмущения, необходимо, согласно теореме Котельникова-Шеннона выполнить условие:
(1.42)
За wвм обычно принимают частоту, у которой амплитуда
А(wВМ) = (0,01 ¸ 0,1)АМ(wв), (1.43)
где АМ(wв) – максимальная амплитуда в частотном спектре возмущающего сигнала.
Частотный подход, очевидно, можно применить и к задающему сигналу. Для того, чтобы цифровая САУ отрабатывала задающий сигнал, по аналогии с (1.42), получим, что
(1.44)
где wЗ – максимальная значащая частота задающего сигнала.
Еще одно условие определения периода квантования основывается на принципе управляемости объектом. Если среди корней характеристического уравнения объекта имеется пара комплексно-сопряженных корней a0 ± jw0, то, чтобы управлять колебательной составляющей свободного движения такого объекта, необходимо обеспечить условие
(1.45)
Таким образом, при выборе периода квантования необходимо учитывать частотные спектры возмущающих воздействий и задающего сигнала, а также динамику объекта управления. Из полученных по формулам (1.42), (1.44),
(1.45), (1.48) и (1.49) значений периода квантования необходимо, очевидно, взять наименьшее, т.е.

 (п. 5.1)
(п. 5.1)
 , то система неустойчива.
, то система неустойчива.
 , (п. 5.2)
, (п. 5.2) , (п. 5.3)
, (п. 5.3) .
. (п. 5.4)
(п. 5.4)
 ,
, .
. и
и 
 . (п. 5.5)
. (п. 5.5) ,
, ,
, . (п. 5.6)
. (п. 5.6) .
. .
.
 .
. и
и  определяется по той же методике, что и для систем первого и второго порядков.
определяется по той же методике, что и для систем первого и второго порядков. .
. .
. .
. ;
;  ; …
; …  .
. . (2.13)
. (2.13) .
. .
. должны быть положительны
должны быть положительны ;
;  ;
;  .
. .
.
 .
. до
до  то получается, что решетчатый сигнал имеет неограниченный спектр частот по сравнению с ограниченным спектром соответствующего непрерывного сигнала.
то получается, что решетчатый сигнал имеет неограниченный спектр частот по сравнению с ограниченным спектром соответствующего непрерывного сигнала.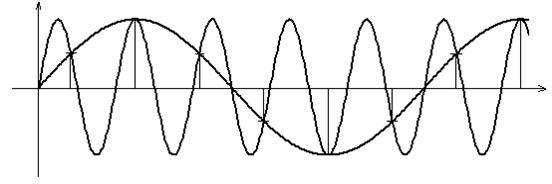
 Для того чтобы из бесконечного периодического спектра выделить спектр непрерывного сигнала и затем однозначно его определить как функцию времени, достаточно пропустить его через идеальный фильтр с диапазоном ±wС
Для того чтобы из бесконечного периодического спектра выделить спектр непрерывного сигнала и затем однозначно его определить как функцию времени, достаточно пропустить его через идеальный фильтр с диапазоном ±wС Из изложенного следует известная теорема Котельникова-Шеннона: для восстановления непрерывного сигнала из его импульсного аналога необходимо, чтобы частота квантования была не меньше удвоенной частоты самой высокой значимой частоты непрерывного сигнала
Из изложенного следует известная теорема Котельникова-Шеннона: для восстановления непрерывного сигнала из его импульсного аналога необходимо, чтобы частота квантования была не меньше удвоенной частоты самой высокой значимой частоты непрерывного сигнала


 (1.45), (1.48) и (1.49) значений периода квантования необходимо, очевидно, взять наименьшее, т.е.
(1.45), (1.48) и (1.49) значений периода квантования необходимо, очевидно, взять наименьшее, т.е.