ТЕМА 2. ОСОБЕННОСТИ УСТРОЙСТВА И ФУНКЦИОНИРОВАНИЯ КОСМИЧЕСКИХ АППАРАТОВ РАЗЛИЧНЫХ КЛАССОВ
Введение. Выведение космических аппаратов на орбиты осуществляется с помощью ракет-носителей (РН), представляющих собой многоступенчатые ракеты, способные разгонять полезную нагрузку до скоростей, равных или выше первой космической. В качестве полезной нагрузки рассматриваются различные группы космических аппаратов или их блоков. Состав, масса и габариты этой нагрузки соответствуют тем целям, для которых они выводятся в космос.
Ракеты-носители разделяются на несколько групп по величине полезных грузов, выводимых на орбиту:
— легкие (с полезным грузом до 5 т). К таким относятся РН «Космос», «Молния»;
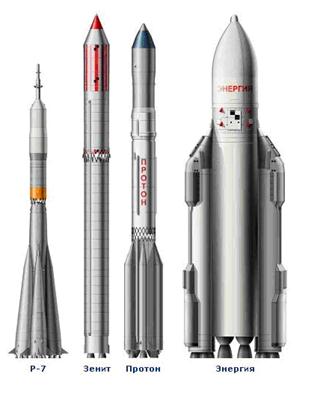
— сверхтяжелые (до 100 т): РН «Энергия», «Н-1» и «Сатурн-5» (США).
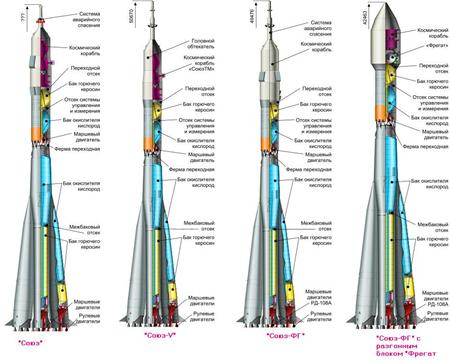
На рис. 2.1 представлены отечественные РН.
В основе разработок первого поколения РН были готовые проекты межконтинентальных жидкостных баллистических ракет. Так, например, с помощью баллистической ракеты Р-7 был выведен на орбиту первый искусственный спутник Земли в 1957 году (РН «Спутник»), а установкой дополнительной ступени обеспечены полеты человека в космос (РН «Союз») и автоматических аппаратов — к Луне и в дальний космос (РН «Молния»). Аналогично в США на базе баллистических ракет «Атлас» и «Титан-2» осуществлялся вывод на орбиту КК «Меркурий» и «Джемини» и других космических аппаратов. В качестве РН могут использоваться и твердотопливные баллистические ракеты, что позволит реализовать программы конверсии ракетной техники (например, на базе российской БР «Тополь» была создана РН «Старт»).
В современных ракетоносителях конструктивные решения отвечают реализации тех уникальных задач, которые отводятся данной РН. Например, РН «Н-1» (СССР) и «Сатурн-5» (США) предназначены для полета человека на Луну. Все РН имеют целесообразные диапазоны использования (по весу полезных нагрузок и целевым задачам).
Для вывода КА на высокие орбиты (например, геостационарные) или в дальний космос используются разгонные ступени. Это могут быть верхние ступени ракеты-носителя либо самостоятельные разгонные блоки, применяемые в конкретных полётных условиях (например, для торможения КА, посадки на планету или для взлета КА с планеты).
Компоновочные схемы. В многоступенчатых РН применяются 'различные компоновочные схемы, отличающиеся расположением ступеней: «тандемные», «пакетные», «комбинированные» с параллельно-последовательным расположением ступеней.
Первая схема имеет большую компоновочную простоту, но требует более мощных стартовых двигателей по сравнению с «пакетной» или «комбинированной», где двигатели первой и последующих ступеней могут работать одновременно, создавая потребную для старта и разгона РН тягу.
Выбор компоновочной схемы зависит от многих условий: конструктивно-силовой схемы РН, возможностей разделения ступеней, величины тяги стартовых двигателей, особенностей стартового комплекса, требований к технологии и эксплуатации.
В многоступенчатых РН конечную скорость приобретает только последняя ступень вместе с полезной нагрузкой — космическим аппаратом.
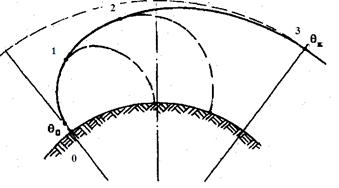
Траектория ракеты-носителя. Траектория движения РН определяется начальными и конечными траекторными углами: старт РН всегда вертикальный (= 90°), что определяется малой тяговооруженностыо ракеты и ее конструктивно-габаритными особенностями; конечный угол наклона траектории (= 0°) отвечает выходу КА на круговую или эллиптическую орбиту (рис. 2.2). Изменение траекторного угла в процессе разгона РН осуществляется по программе с малыми боковыми перегрузками.
Рис. 2.2. Траектория полета ракеты-носителя и ее ступеней:
0 — старт; 1 — отделение 1-й ступени; 2 — отделение 2-й ступени; 3 — выход на орбиту
Управление движением. Для осуществления программного полета и обеспечения управления движением и стабилизации в РН применяются газодинамические способы создания управляющих сил и моментов. На начальном участке полета РН в плотных слоях атмосферы определенную часть этих сил и моментов могут создавать аэродинамические рули и стабилизаторы.
Состав бортового оборудования. В состав бортового оборудования РН входят: аппаратура системы наведения и управления полетом; оборудование, обеспечивающее управление двигательной установкой и контроль основных систем, и система электрооборудования.
Система наведения и управления полетом состоит из:
— инерциальных систем навигации, определяющих углы ориентации корпуса РН, непрерывно измеряющие ускорение центра масс под действием внешних сил и вычисляющие скорость и координаты местонахождения РН относительно навигационных систем координат, а также пройденный ею путь;
— аппаратуры траекторных измерений;
— программно-вычислительных устройств, вырабатывающих команды на управление движением РН и выключение двигателей при достижении ракетой заданных конечных параметров скорости, траекторного угла и координат, обеспечивающих выполнение полетного задания.
Система оборудования состоит из:
— приборов, управляющих режимами работы двигательной установки и обеспечивающих заданные величины тяги;
— приборов контроля, анализирующих состояние параметров в камерах сгорания, топливных баках и насосах, осуществляющих управление опорожнением топливных баков, обнаружение неисправностей в работе двигателей и других систем в полете и перед стартом;
— телеметрических систем, передающих данные (замеры многочисленных датчиков работы приборов) на командно-управляющий комплекс.
Система электрооборудования состоит из источников питания, различных преобразователей электрической энергии и многочисленных коммуникаций (линий связи с приборами и системами). В качестве бортовых источников электроэнергии могут служить аккумуляторы (ампульные батареи) и бортовые генераторы.
Размещение бортового оборудования отвечает функциональным требованиям и условиям надежной эксплуатации РН. Часть оборудования может размещаться по ступеням (исполнительные механизмы), однако управляющие системы обычно располагаются на последней ступени.
Для обеспечения надежной работы некоторых приборов управления требуются особые условиях их размещения на РН. С этой целью они могут располагаться на гироплатформах, сохраняющих свою пространственную ориентацию, а также в терморегулированных отсеках.
Определенные требования выдвигаются к приборам и устройствам, осуществляющим разделение ступеней РН после окончания работы соответствующих двигателей.
Двигательные установки. Двигатели обеспечивают разгон РН до конечной скорости, соответствующей выбранной траектории (орбите) космического полета, а также создают управляющие силы и моменты, необходимые для управления и стабилизации полета.
Первая задача выполняется маршевыми двигателями, суммарная тяга которых должна превышать силу веса соответствующей субсистемы ракеты (т.е. весу ступени и той части ракеты, которая разгоняется этой ступенью). Поэтому стартовая тяга двигателей может составлять сотни и даже тысячи тонн — в зависимости от стартового веса РН. Двигательная установка стартовой ступени обычно выполняется в виде «связки» нескольких ЖРД, каждый из которых может иметь тягу до 1000-7000 кН.
Управляющие моменты на РН обычно создаются отклонением маршевых либо управляющих (вспомогательных) камер ЖРД в двух взаимно перпендикулярных плоскостях на угол до ± 5°, для чего камеры ЖРД закрепляются в кардановых подвесах.
Основными критериями для выбора двигательных установок РН является их энергетическая эффективность при обеспечении высокой надежности (особенно для вывода пилотируемых КК).
Наивысшую надежность из всех ракетных двигателей имеют твердотопливные (РДТТ). Однако удельный импульс даже лучших РДТТ в 1,5 — 2 раза уступает лучшим ЖРД, а масса их конструкции в несколько раз больше, чем ЖРД. Поэтому для РН, требующих высокого энергетического и весового совершенства, основным типом двигательных установок являются ЖРД.
В ЖРД могут использоваться низкокипящие компоненты топлива: жидкий кислород и водород. В РН используются также высококипящие компоненты (являющиеся в обычном состоянии жидкостями): в качестве окислителя — азотная кислота или азотный тетраксид, а в качестве горючего — керосин.
Применение низко кипящих компонентов усложняет подготовку РН к старту в связи с их энергичным испарением. Поэтому заправка жидких компонентов осуществляется непосредственно перед стартом РН, а вплоть до самого отделения РН от пускового стола, продолжается подпитка баков жидкими компонентами.
Важным требованием, учитываемым при выборе компонентов топлива для запуска пилотируемых КК, является их нетоксичность. В связи с этим РН «Протон», работающая на токсичных компонентах, не используется для пилотируемых КК.
Для повышения безопасности экипажей при старте жидкостных РН применяются системы аварийного спасения (САС), устанавливаемые на обтекателях КК и отделяющие их вместе с экипажем в случае аварийной обстановки. В конструкциях САС используется РДТТ, обладающие высокой надежностью.
Двигательные установки являются основой конструкции РН и составляют до 90 — 95% ее массы, а топливные баки выполняют роль корпуса. Поэтому правильный выбор проектных параметров двигательной установки во многом определяет совершенство конструкции всей ракеты. При проектировании топливных баков учитывается все действующие на них внешние нагрузки, а также внутренние избыточные давления, которыми обеспечивается вытеснение жидких компонентов топлива из баков.
На надежность работы двигательной установки оказывают существенное влияние динамические процессы в топливных баках: колебание топлива, тепломассообмен между жидкой и газовой средой, упругие колебания корпуса, что приводит к значительным амплитудам колебаний и дополнительным нагрузкам на корпус РН. С ними особо приходится считаться в мощных РН, длина которых может составлять десятки метров.
Конструктивные особенности. Конструкцию ракеты-носителя отличают от конструкций других классов ЛА высокое весовое совершенство и большие габариты, многих агрегатов, отсеков и элементов. Это требует оптимальных конструктивных решений для каждого отсека, применения совершенных материалов и современных технологических методов изготовления, сборки и испытаний.
Для обеспечения устойчивости высокоразмерных корпусов РН при действии сжимающих и изгибающих нагрузок в силовых элементах применяются гофрированные, трехслойные и вафельные конструкции. В топливных баках на их устойчивость такое же влияние оказывает избыточное внутреннее давление, растягивающее днища и обечайки баков.
Перспективными для РН могут стать композиционные конструкции, выполненные на основе угле-, органо- и боропластиков, а также теплостойкие наномодифицированные полимерные композиционные материалы. Однако пока их стоимость по сравнению с металлами значительно выше.
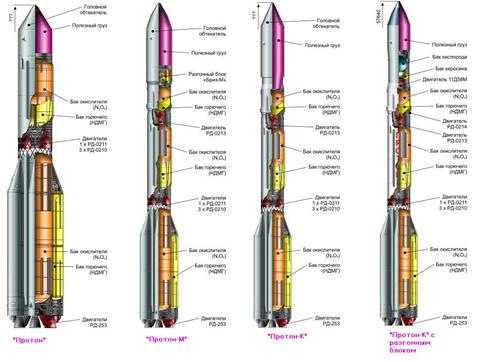
Компоновочные схемы некоторых отечественных ракетоносителей с указанием внутренного состава представлены на рис. 2.3, 2.4.

 = 90°), что определяется малой тяговооруженностыо ракеты и ее конструктивно-габаритными особенностями; конечный угол наклона траектории (
= 90°), что определяется малой тяговооруженностыо ракеты и ее конструктивно-габаритными особенностями; конечный угол наклона траектории ( = 0°) отвечает выходу КА на круговую или эллиптическую орбиту (рис. 2.2). Изменение траекторного угла в процессе разгона РН осуществляется по программе с малыми боковыми перегрузками.
= 0°) отвечает выходу КА на круговую или эллиптическую орбиту (рис. 2.2). Изменение траекторного угла в процессе разгона РН осуществляется по программе с малыми боковыми перегрузками.