а) Управление объектом с использованием воздействий по координате ошибки.
Рассмотрим пример систем автоматического регулирования с переменной структурой третьего порядка и проиллюстрируем полученные результаты с помощью MVS. Рассмотрим систему дифференциальных уравнений (3.1)
(3.1)
(3.2)
Где
(3.3)
Убедимся, что для такой системы всегда можно найти плоскость скольжения S, в которой движение устойчиво.
Для устойчивости движения в скользящем режиме коэффициенты с1 и с2 в (3.2) следует выбрать так, чтобы
с1>0 и с2>0. (3.4)
С другой стороны, для того чтобы плоскость S, заданная в пространстве (x1,x2,x3) уравнением S=0, была плоскостью скольжения коэффициенты с1 и с2 должны, как известно, удовлетворять условиям (2.46) или
(3.5)
Очевидно, что условия (3.4) и (3.5) могут быть выполнены одновременно.
Используя формулы 3.1-3.5 составим модель, используя пакет MVS. Структурная схема работы модели изображена на рис. 3.6.
Проект в MVS состоит из следующих частей:
а) структурная схема (рис. 3.6)
Рис. 3.6
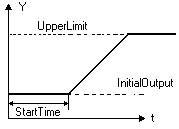
Данная структурная схема состоит из двух элементов CrampGenerator1 и VarStruct_1. Первый элемент CrampGenerator1 – генератор равномерного нарастающего сигнала. Данный элемент содержит следующие параметры:
а) InitialOutput: double := 0; -- начальный уровень сигнала
б) UpperLimit: double := 100; -- предельный уровень сигнала
в) Slope: double := 1; -- скорость нарастания уровня сигнала
г) StartTime: double := 0; -- начальная задержка
Работу данного устройства можно описать следующей схемой рис. 3.7
Рис. 3.7
Второй элемент VarStruct_1 – является локальным блоком характеризующим работу класса VarStruct. В данном блоке один вход на который подается сигнал с CrampGenerator_1 и один выход.
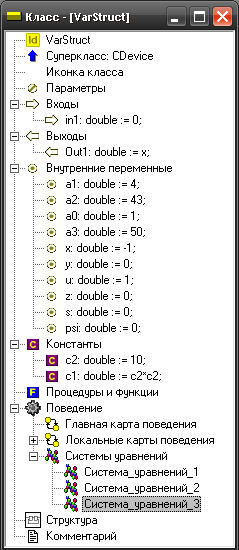
Далее рассмотрим структуру добавленного класса VarStruct (рис. 3.8).
Рис. 3.8
Данный класс содержит ряд внутренних переменных и констант представленных в (табл. 3.1), главной карты поведения (рис. 3.9), и трёх систем уравнений, характеризующих состояния системы.
Таблица 3.1
переменная
тип
значение
a1
double
a2
double
a3
double
a4
double
x
double
-1
y
double
u
double
z
double
s
double
psi
double
с1
double
с2*с2
с2
double
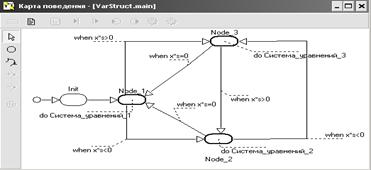
Главная карта поведения представлена на рис. 3.9, где каждый узел графа характеризует одно из трёх состояний системы в зависимости от ψ согласно (3.3):
а) при x*s=0 – начальное состояние системы;
б) при x*s<0 – состояние системы № 2;
в) при x*s>0 – состояние системы № 3.
Возможные переходы системы из одного состояния в другое представлены на карте поведения и указаны ломаной линией со стрелкой указывающей направление перехода.
Возможные переходы в системе:
а) из 1-го состояния x*s=0 во 2-ое при условии, что x*s<0
б) из 1-го состояния x*s=0 в 3-е при выполнении условия x*s>0
в) из 3-го состояния в 1-ое и из 3-го состояния во 2-ое при выполнении условия x*s=0 (переход в начальное значение)
г) из 3-го состояния во 2-ое при выполнении условия x*s>0
д) из 2-го состояния в 3-е при x*s<0
е)
Рис. 3.9. Карта поведения
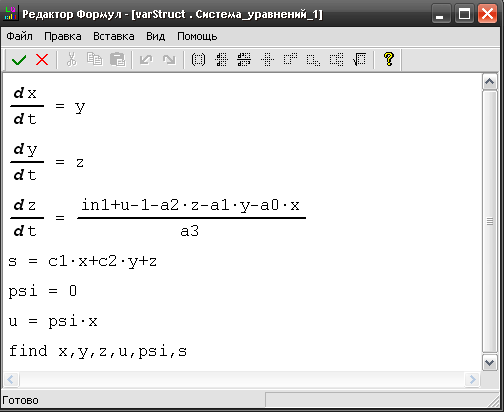
Каждое состояние системы описано системой уравнений согласно (3.1) и дополнительными условиями (3.2 – 3.3). Условия работы системы в 1-ом состоянии изображены на рис. 3.10
Рис. 3.10. Состояние системы № 1
Аналогичные условия будут и для состояний системы №2 и 3, с той лишь разницей, что для состояния №2 ψ=-1, для №3 ψ=1.
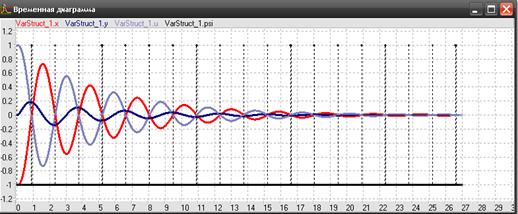
Результаты работы системы представлены на временной диаграмме (рис. 3.11) и фазовой диаграмме (рис. 3.12)
Рис. 3.11 Временная диаграмма
Анализируя полученную временную диаграмму стоит сказать, что система с переменной структурой в данном случае стабилизируется на 25 такте своей работы, система попадает в скользящий режим, т.е. в режим при котором на прямой переключения (гиперплоскости переключения) изменение структуры происходит с бесконечно растущей частотой.
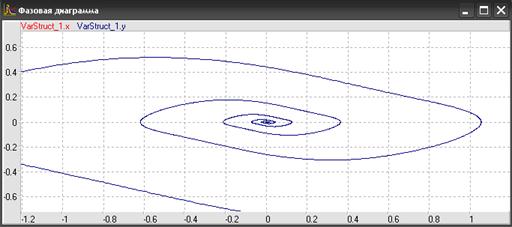
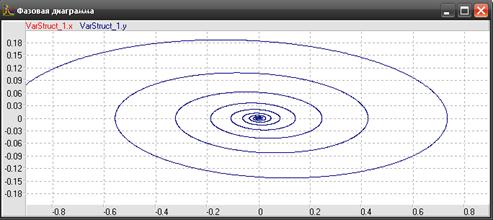
Рис. 3.13 Фазовая диаграмма
Фазовая диаграмма модели свидетельствует о том, что система с переменной структурой является устойчивой, так как фазовые траектории стремятся к 0.
В заключение на основании изложенных выше результатов, наметим методику выбора параметров управляющего устройства в системе с переменной структурой (2.34) - (2.37), которые гарантируют существование гиперплоскости скольжения с устойчивым движением. Задача состоит в выборе таких коэффициентов α, β, сi, чтобы удовлетворялись (2.45), (2.46) и решение системы (2.53) было устойчивым. Из (2.46) следует, что один из коэффициентов ci , например cn-1 можно задавать произвольно, а затем найти оставшиеся. Далее по полученным значениям с1 и cn-1 найти согласно (2.45). Если не ограничены, то сn, может принимать любое значение; если ограничены, то сn-1, можно выбирать из некоторой ограниченной области. Заметим, что даже при неограниченных не всегда удается одновременно удовлетворить условиям теоремы и условиям существования гиперплоскости скольжения.
С другой стороны, эта задача может быть решена средствами систем с переменной структурой, если помимо ошибки коммутировать воздействия, кроме того, еще и по другим координатам системы, для этого рассмотрим второй способ.
б) Управление с использованием воздействий по ошибке и её производным.
Приведём пример систем автоматического регулирования с переменной структурой четвертого порядка. Полученные результаты продемонстрируем с помощью программного продукта MVS.
Рассмотрим систему дифференциальных уравнений (3.6)
(3.6)
где управление u скачкообразно меняется на гиперплоскости S заданной уравнением s=0,
(3.7)
с1,с2,с3 – положительные величины.
Увеличим число коммутаций k на единицу и составим управление в виде суммы ошибки и её производной, причём коэффициенты воздействий по этим координатам будем скачкообразно менять по-прежнему на гиперплоскости S(s=0). Тогда для системы (3.6) управление u будет иметь вид
(3.8)
(3.9)
s задано согласно (3.7)
В силу (2.74) и (2.75) гиперплоскость S будет гиперплоскостью скольжения, если
(3.10)
(3.11)
Используя выше описанные формулы (3.6 – 3.11) составим модель системы с переменной структурой в MVS. Рассмотрим далее каждый структурный элемент модели в отдельности.
Виртуальный стенд модели используемый в данном случае полностью совпадает с виртуальным стендом, который рассматривался в первом случае (рис. 3.6).
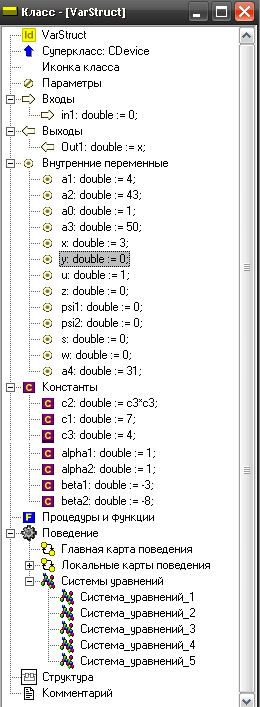
Далее перейдем к рассмотрению добавленного класса VarStruct (рис. 3.14)
Рис. 3.14
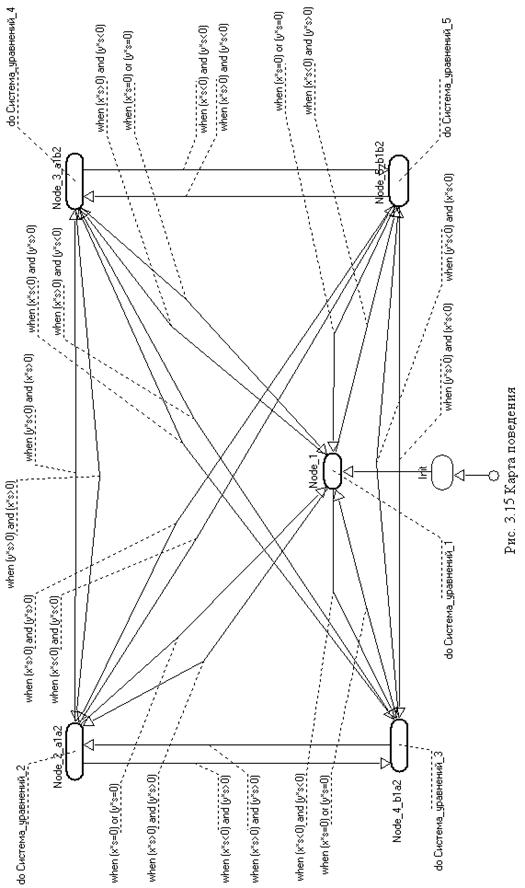
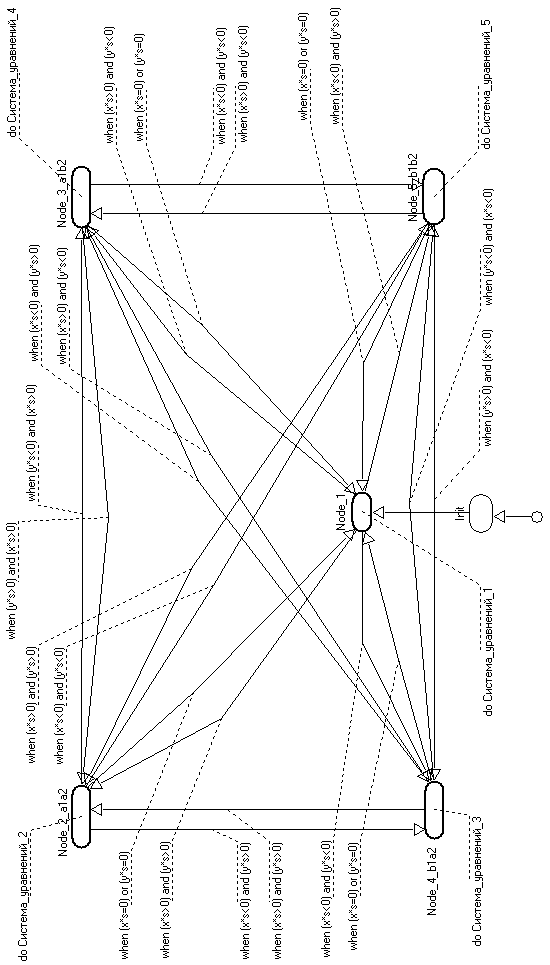
Начальные значения переменных и констант, их тип наглядно показаны на рис. 3.14. Поэтому далее перейдём к более детальному рассмотрению главной карты поведения системы (рис. 3.15).
Данная карта поведения состоит из 6 узлов, один из которых Init является начальным узлом, остальные пять – это состояния системы, которые описываются системой уравнений. Все переходы представленные в карте поведения модели занесены в табл. 3.2.
Таблица 3.2
№ нач. сост. системы
направление перехода
условие перехода
№ сост.в которое системы переходит
→
x*s>0 и y*s>0
→
x*s<0 и y*s<0
→
x*s>0 и y*s<0
→
x*s<0 и y*s>0
→
x*s=0 и y*s=0
→
x*s<0 и y*s>0
→
x*s>0 и y*s<0
→
x*s<0 и y*s<0
→
x*s=0 и y*s=0
→
x*s>0 и y*s>0
→
x*s<0 и y*s>0
→
x*s<0 и y*s<0
→
x*s=0 и y*s=0
→
x*s>0 и y*s<0
→
x*s>0 и y*s>0
→
x*s<0 и y*s<0
→
x*s=0 и y*s=0
→
x*s>0 и y*s>0
→
x*s<0 и y*s>0
→
x*s>0 и y*s<0
Рассмотрим систему уравнений для 1-го состояния модели (рис. 3.16). Вызовем окно редактора формул, в котором задано начальное состояние системы согласно (3.6 – 3.9). Состояния системы № 2,3,4 и 5 также содержат данную систему уравнений, однако значение ψ1 и ψ2 вычисляются согласно (3.9 – 3.10).
Рис. 3.16
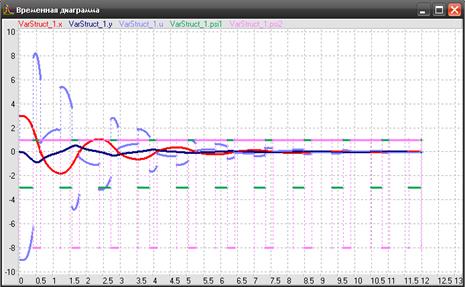
Результат работы модели системы с переменной структуры с управляющим воздействием по координате ошибки и её производной представлен на временной диаграмме (рис. 3.17) и фазовой диаграмме (рис. 3.18).
Рис. 3.17 Временная диаграмма
Временная диаграмма модели иллюстрирует сигнал ошибки – x, y=x\, u - управляющее воздействие, а также изменение ψ1,ψ2 согласно (3.9 -3.10)
Рис. 3.18 Фазовая диаграмма
Так как и в первом случае анализируя полученную фазовую диаграмму следует сказать, что модель системы с переменной структурой является устойчивой, фазовые траектории стремятся 0, система попадает в скользящий режим.
Следовательно, для исходной системы четвертого порядка с помощью двух коммутаций всегда можно обеспечить существование гиперплоскости скольжения с устойчивым движением.

 (3.1)
(3.1) (3.2)
(3.2)
 (3.3)
(3.3) (3.5)
(3.5)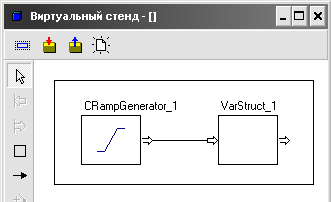
 согласно (2.45). Если
согласно (2.45). Если 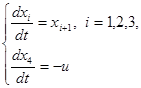 (3.6)
(3.6) (3.7)
(3.7) (3.8)
(3.8)
 (3.9)
(3.9) (3.10)
(3.10) (3.11)
(3.11)