4.3.1. Принципиальная и структурная схемы асинхронно- вентильного каскада. Принципиальную и структурную схему начертить на листе форматом А4 . На листе с принципиальной схемой привести основные технические данные и тип элементов электропривода, а на листе со структурной схемой- значения параметров электрической цепи и регуляторов.
Электродвигатель выбирается, исходя из потребляемой механической мощности и скорости вращения установки. Так как двигатель работает в продолжительном режиме , то проверять его на перегрузочную способность нет необходимости.
4.3.2. Выбор оборудования вентильного каскада.
Выпрямитель, инвертор и трансформатор инвертора, по своей мощности зависят от требуемой глубины регулирования частоты вращения, т.е. от требуемого максимального скольжения.
В задаче, для уменьшения объема вычислительных и графических работ, принято, что двигатель пускается с помощью регулирования напряжения инвертора, т.е. .
На практике в схеме АВК регулирование скорости вращения, как правило, осуществляется в диапазоне 2:1, поэтому мощность инвертора и трансформатора может быть выбрана равной половине мощности ( ) двигателя. При этом пуск электродвигателя до минимальной скорости вращения осуществляется с помощью включения резисторов в цепь ротора.
Выбирать неуправляемый выпрямитель, включенный в цепь ротора, в работе не требуется.
Дроссель в цепи выпрямленного тока выбирается по току, напряжению и индуктивности. Индуктивность рассчитывается по формуле [2]
, (4.1)
где - индуктивное сопротивление рассеяния фазы статора и ротора,
- коэффициент приведения сопротивления обмотки ротора к обмотке статора.
Тип дросселя не выбирается. Активное сопротивление дросселя принимается ,
где в Генри.
Ток и напряжение в цепи постоянного тока определяется из уравнений [2] (4.2а)
, (4.2б)
где - номинальный ток и напряжение ротора.
- максимальное скольжение.
4.3.3. Выбор инвертора.
Выбор инвертора производится по номинальному выпрямленному току определенному по формуле (4.2а) и напряжению
,
где (4.3.) - эквивалентное сопротивление двигателя, приведенное к цепи постоянного тока;
- ЭДС, приведенное к цепи постоянного тока;
- скольжение (принимается среднее значение =0,6).
Необходимо, чтобы номинальный ток и напряжение преобразователя отвечали соотношению , .
4.3.4. Выбор трансформатора.
Трансформатор инвертора выбирается по току и напряжению вторичной обмотки. Напряжение первичной обмотки трансформатора 380В.
Линейное напряжение вторичной обмотки трансформатора определяется из выражения , (4.4)
где - угол управления вентилей преобразователя в инверторном режиме.
Ток вторичной обмотки трансформатора определяется из соотношения .
Типовая мощность трансформатора рассчитывается по формуле , (4.5)
где - коэффициент схемы.
Технические данные инвертора и трансформатора даны в табл. 4.3,4.4.
4.3.5. Определение параметров звеньев, входящих в структурную схему.
Активное и индуктивное сопротивление трансформатора приводятся к вторичной обмотке, и определяются по формулам
; ; . (4.6).
Индуктивность обмотки трансформатора находится из соотношения
(4.7),
где - потери в обмотках при опыте короткого замыкания, Вт;
- напряжение короткого замыкания в %;
- номинальное напряжение и ток вторичной обмотки трансформатора;
- полное сопротивление обмоток трансформатора, приведенное к вторичной обмотке;
- угловая частота напряжения сети.
- индуктивное сопротивление фазы трансформатора.
Технические характеристики выпрямителей типа ТЕ.
Таблица 4.3.
№
п/п
Тип
Напряжение
сети, B
Максим.вып-
рям.напряж. B
Номиналь-
ный ток, A
Перегрузоч-
ная способн.
1.
ТЕ4-3 230Н-1-2УХЛЧ
2.
ТЕ4-100 230Н-1-2УХЛЧ
3.
ТЕ4-160 230Н-1-2УХЛЧ
2.25
в течение
4.
ТЕ4-200 230Н-1-2УХЛЧ
10 сек.
5.
ТЕ4-63 230Н-1-2УХЛЧ
6.
ТЕ4-100 230Н-1-2УХЛЧ
7.
ТП4-320 230Н-1-2УХЛЧ
Технические характеристики трансформаторов типа ТСП.
Таблица 4.4.
№
п/п
Тип
поте-
ри ХХ
поте-
ри КЗ
кВA
В
В
А
%
%
Вт
Вт
1.
ТСП-16/07-04
14.6
205
41
5.2
20.5
2.
ТСП-25/07-04
29.1
205
82
5.5
3.
ТСП-63/07-04
205
162
5.5
4.
ТСП-100/07-04
262
5.8
5.
ТСП-25/07-4ХЛ
126.5
5.5
6.
ТСП-63/07-04
264
5.5
Примечание. В числителе даны значения напряжения и тока при параллельном соединении вторичных обмоток трансформатора, а в знаменателе при их последовательном соединении.
Эквивалентное активное сопротивление, приведенное к цепи звена постоянного тока
(4.8),
где , индуктивное сопротивление двигателя, приведенное к цепи ротора;
=0,6- скольжение, (принимается среднее значение между максимальным и минимальным);
- сопротивление статора, приведенное к цепи ротора, и сопротивление ротора;
- сопротивление дросселя
- фиктивное сопротивление, учитывающее падение напряжения в выпрямителе и инверторе, при коммутации тока вентилей.
Индуктивность, приведенная к цепи постоянного тока
(4.9),
где - индуктивность цепи статора, приведенная к цепи ротора, и индуктивность ротора;
- индуктивность дросселя в цепи постоянного тока и индуктивность фазы трансформатора.
Эквивалентная постоянная времени, приведенная к цепи (4.10) постоянного тока
(4.10).
Машинный коэффициент определяется из уравнения
(4.11),
где -ЭДС ротора.
- синхронная скорость двигателя.
Коэффициент усиления преобразователя определяется из выражения
(4.12),
где - линейное напряжение вторичной обмотки трансформатора;
=1,35- коэффициент трехфазной мостовой схемы;
=8В- напряжение управления преобразователем.
Постоянная времени задатчика интенсивности принимается равной времени разгона (tp).
Время разгона определяется из уравнения
(4.13),
где - приведенный момент инерции;
- пусковой и статический моменты двигателя;
- мощность насосной установки в КВт;
- номинальная скорость двигателя.
4.3.6. Составление схемы модели при моделировании на АВМ.
При составлении модели необходимо знать, что задатчик интенсивности и механическая часть являются интегральными звеньями, инвертор и электромагнитная цепь двигателя- апериодические звенья, а машинный коэффициент является пропорциональным звеном.
Суммирование сигнала производится на операционных усилителях.
Схемы интегрального и апериодических звеньев, собранных на операционных усилителях, и схемы их моделей представлены на рис.4.3.
Задатчик интенсивности на модели можно представить интегральным звеном с ограничением выходного напряжения с помощью схемы, представленной на рис.4.3, или включением стабилитрона в цепь обратной связи усилителя параллельно конденсатору.
4.3.7. Определение масштабов и коэффициентов для схемы модели.
При расчёте масштабов и коэффициентов необходимо иметь в виду, что напряжение АВМ может изменяться в пределах от 8 до 100В, а машинный коэффициент в пределах 0.08...10.
Предварительно масштабы определяются из соотношения
(4.14),
где - максимальное рабочее напряжение АВМ.,
- максимальное возможное значение реальной переменной в моделируемой системе.
Например, масштаб напряжения в цепи постоянного тока
.
Коэффициенты модели определяются в зависимости от вида звена.
Для пропорционального звена
(4.15),
где - реальное значение коэффициента усиления.
Для интегрирующего звена (рис. 4.3(а,б))
, (4.16)
где - коэффициент передачи обратной связи, при этом входным сигналом является регулируемый параметр;
- постоянная времени,
Рис. 4.3. Схемы интегрирующего (а) и апериодического (в) усилителей и изображение их в схеме модели (б,г)..
- масштаб времени, определяемый отношением машинного времени к реальному. Машинное время должно быть не более 200 сек. Как правило, принимается в пределах от одного до 20-ти.
Для апериодического звена ( рис. 4.3 (в,г).)
, , , (4.18)
где - постоянная времени апериодического звена;
- коэффициент усиления для данной входной цепи, например, для - ;
- передаточный коэффициент обратной связи регулируемого параметра.
Здесь передаточный коэффициент обратной связи можно выразить через отдельный пропорциональный усилитель.
Если передаточные коэффициенты получились больше или меньше значений указанных выше, то необходимо изменить масштаб, т.е. взять машинное напряжение не 100В, а меньше, или поставить последовательно два усилителя, а для интегрального и апериодического звеньев можно изменить масштаб времени, но при этом надо учесть, что масштаб времени должен изменяться одновременно во всех звеньях. Необходимо проверить знаки в цепи обратных связей. Если они не совпадают с реальными, то в цепь обратной связи нужно включить инвертирующий усилитель.
4.3.8. Составление алгоритма расчета переходных процессов на ЦВМ.
Для составления алгоритма расчета переходного процесса передаточные функции каждого звена надо записать в виде дифференциальных уравнений, а затем перейти к уравнениям численного метода вычисления.
Для пропорционального звена, например, внутренней обратной связи по ЭДС ротора.
.
Интегральное звено в дифференциальной форме запишется в виде (4.18)
(4.19).
При решении численным методом Эйлера определяется по формуле
(4.20).
Данная запись действительна и для задатчика интенсивности, но в этом случае надо ограничить значение выходного сигнала.
Ограничение достигается с помощью логики, например, если , то .
Для механической части дифференциальное уравнение будет иметь вид ,
а его решение численным методом примет выражение
(4.21).
Здесь надо учесть, что при скорость двигателя равна 0. Это можно записать так: если то .
Апериодическое звено в дифференциальной форме запишется уравнением
(4.22).
Его решение выражается соотношением
(4.23).
Алгоритм можно составить в виде текста или блок-схемы.
Алгоритм составляется в следующей последовательности:
Заголовок.
1. Исходные данные электродвигателя и преобразователя.
2. Шаг и время интегрирования- , цикл печати .
3. Начальные условия расчетных величин. В данном случае
,
.
Печать исходных данных ( желательно).
5. Начало цикла.
6. Расчетные формулы.
7. Счет циклов .
8. Если число циклов то перейти к концу цикла (10).
9. Печать расчетных данных.
Печатать необходимо текущее значение времени , момент двигателя , скорость далее необходимо обнулить количество циклов .
10. Конец цикла
11. Конец.
Шаг интегрирования принимают равным .
Время расчета переходного процесса должно равняться приблизительно времени разгона. Для составления программы целесообразно составить таблицу машинных обозначений параметров с указанием их значений.
Рекомендуемая форма приведена в табл. 4.5.
4.3.9. Фрагмент программы для интегрального звена.
Задатчик интенсивности запишется так:
,
IF ТНЕN
После составления программы необходимо набрать ее на ПЭВМ, произвести расчет и построить график переходных процессов при отсутствии ПЭВМ по месту работы расчет переходного процесса можно выполнить на кафедре ЭАПУ на ПЭВМ с использованием программы под именем "аvk. ваs" Ниже приведен порядок работы на ПЭВМ.
Включение машины производится следующим образом.
1, Включите компьютер в сеть.
2. После начальной загрузки (20-30) сек. необходимо навести инверсную строку на надпись LANG и нажать ВВОД.
3. Затем навести инверсную строку на надпись ТВ и снова нажать ВВОД.
4. Навести инверсную строку на надпись "аvk. ваs" и снова нажать ВВОД.
5. После загрузки программы, ее можно запустить наведя инверсный кубик на RUN.
6. Далее работать по запросам программы.
7. Для перезапуска программы, или выхода, нажмите ESC, управляя стрелками выберете нужную функцию в верхнем меню ( для перезапуска RUN).
Выбор вопроса осуществляется по предпоследней цифре шифра.
№
п/п
Вопрос
Ответ
0.
Какие параметры в модели и оригинале должны быть равными при исследовании в одном и том же масштабе времени физической модели простейшей электромагнитной цепи?
1.Постоянная времени.
2.Индуктивность.
3.Активное сопротивление.
1.
Дифференциальное уравнение имеет вид .
Какого типа это звено?
Желаемая передаточная функция разомкнутой системы контура скорости при подчинённом регулировании имеет вид .На какой оптимум в этом случае настраивается система?
1. Модульный (технический) оптимум.
2. Симметричный оптимум.
3. Не настроен ни на какой оптимум.
6.
Какая передаточная функция регулятора скорости соответствует настройке на симметричный оптимум?
1. .
2. .
3. .
7.
Какое звено электродвигателя постоянная тока имеет передаточную функцию вида ?
1.Электромагнитная цепь якоря .
2.Электромагнитная цепь обмотки возбуждения .
3.Внутренняя обратная связь по ЭДС.
8.
По какой формуле находится коэффициент передачи интегрального звена для операционного усилителя при моделировании на АВМ?
1. .
2. .
3. , ,
9.
Для составления программы моделирования при пуске после определения скорости по формуле иногда пишется логическое выражение
IF THEN .При каком виде сопротивления пишется это выражение?
1. А.В. Башарин и др. Управление электроприводами. Л. Энергоиздат Ленинградское отделение, 1982.
2. Г.Б. Онищенко, И.Л. Локтева. Асинхронные вентильные каскады и двигатели двойного питания. М.: "Энергия", 1979.
3. М.Г. Чиликин, В.И. Ключев, А.С. Сандлер. Теория автоматизированного электропривода М.: " Энергия", 1979.
4. Тиристорные преобразователи типа ТЕ, ТЕР,ТП,ТПР,каталог 05.04.016-90, М.:Информэлектро,!990.
5. Трансформаторы серии ТСП,ТС ЗП для питания комплектных тиристорных преобразователей электроприводов постоянного тока, каталог 03.34.07-89. М.:Информэлектро, 1989.

 и скорости вращения установки. Так как двигатель работает в продолжительном режиме
и скорости вращения установки. Так как двигатель работает в продолжительном режиме  , то проверять его на перегрузочную способность нет необходимости.
, то проверять его на перегрузочную способность нет необходимости. .
. ) двигателя. При этом пуск электродвигателя до минимальной скорости вращения осуществляется с помощью включения резисторов в цепь ротора.
) двигателя. При этом пуск электродвигателя до минимальной скорости вращения осуществляется с помощью включения резисторов в цепь ротора. , (4.1)
, (4.1) - индуктивное сопротивление рассеяния фазы статора и ротора,
- индуктивное сопротивление рассеяния фазы статора и ротора, - коэффициент приведения сопротивления обмотки ротора к обмотке статора.
- коэффициент приведения сопротивления обмотки ротора к обмотке статора.
 ,
, в Генри.
в Генри. (4.2а)
(4.2а) , (4.2б)
, (4.2б) - номинальный ток и напряжение ротора.
- номинальный ток и напряжение ротора. ,
, (4.3.) - эквивалентное сопротивление двигателя, приведенное к цепи постоянного тока;
(4.3.) - эквивалентное сопротивление двигателя, приведенное к цепи постоянного тока; - ЭДС, приведенное к цепи постоянного тока;
- ЭДС, приведенное к цепи постоянного тока; - скольжение (принимается среднее значение
- скольжение (принимается среднее значение  ,
,  .
. , (4.4)
, (4.4) - угол управления вентилей преобразователя в инверторном режиме.
- угол управления вентилей преобразователя в инверторном режиме. определяется из соотношения
определяется из соотношения  .
. , (4.5)
, (4.5) - коэффициент схемы.
- коэффициент схемы. ;
;  ;
; 
 . (4.6).
. (4.6). (4.7),
(4.7), - потери в обмотках при опыте короткого замыкания, Вт;
- потери в обмотках при опыте короткого замыкания, Вт; - напряжение короткого замыкания в %;
- напряжение короткого замыкания в %; - номинальное напряжение и ток вторичной обмотки трансформатора;
- номинальное напряжение и ток вторичной обмотки трансформатора; - полное сопротивление обмоток трансформатора, приведенное к вторичной обмотке;
- полное сопротивление обмоток трансформатора, приведенное к вторичной обмотке; - угловая частота напряжения сети.
- угловая частота напряжения сети. - индуктивное сопротивление фазы трансформатора.
- индуктивное сопротивление фазы трансформатора. в течение
в течение






 (4.8),
(4.8), , индуктивное сопротивление двигателя, приведенное к цепи ротора;
, индуктивное сопротивление двигателя, приведенное к цепи ротора; - сопротивление статора, приведенное к цепи ротора, и сопротивление ротора;
- сопротивление статора, приведенное к цепи ротора, и сопротивление ротора; - сопротивление дросселя
- сопротивление дросселя - фиктивное сопротивление, учитывающее падение напряжения в выпрямителе и инверторе, при коммутации тока вентилей.
- фиктивное сопротивление, учитывающее падение напряжения в выпрямителе и инверторе, при коммутации тока вентилей. (4.9),
(4.9), - индуктивность цепи статора, приведенная к цепи ротора, и индуктивность ротора;
- индуктивность цепи статора, приведенная к цепи ротора, и индуктивность ротора; - индуктивность дросселя в цепи постоянного тока и индуктивность фазы трансформатора.
- индуктивность дросселя в цепи постоянного тока и индуктивность фазы трансформатора. (4.10).
(4.10). определяется из уравнения
определяется из уравнения (4.11),
(4.11), -ЭДС ротора.
-ЭДС ротора. - синхронная скорость двигателя.
- синхронная скорость двигателя. (4.12),
(4.12), - линейное напряжение вторичной обмотки трансформатора;
- линейное напряжение вторичной обмотки трансформатора; =1,35- коэффициент трехфазной мостовой схемы;
=1,35- коэффициент трехфазной мостовой схемы; =8В- напряжение управления преобразователем.
=8В- напряжение управления преобразователем. (4.13),
(4.13), - приведенный момент инерции;
- приведенный момент инерции; - пусковой и статический моменты двигателя;
- пусковой и статический моменты двигателя; - мощность насосной установки в КВт;
- мощность насосной установки в КВт; - номинальная скорость двигателя.
- номинальная скорость двигателя. (4.14),
(4.14), - максимальное рабочее напряжение АВМ.,
- максимальное рабочее напряжение АВМ., - максимальное возможное значение реальной переменной в моделируемой системе.
- максимальное возможное значение реальной переменной в моделируемой системе. .
. (4.15),
(4.15), - реальное значение коэффициента усиления.
- реальное значение коэффициента усиления. ,
,  (4.16)
(4.16) - коэффициент передачи обратной связи, при этом входным сигналом является регулируемый параметр;
- коэффициент передачи обратной связи, при этом входным сигналом является регулируемый параметр; - постоянная времени,
- постоянная времени, Рис. 4.3. Схемы интегрирующего (а) и апериодического (в) усилителей и изображение их в схеме модели (б,г)..
Рис. 4.3. Схемы интегрирующего (а) и апериодического (в) усилителей и изображение их в схеме модели (б,г)..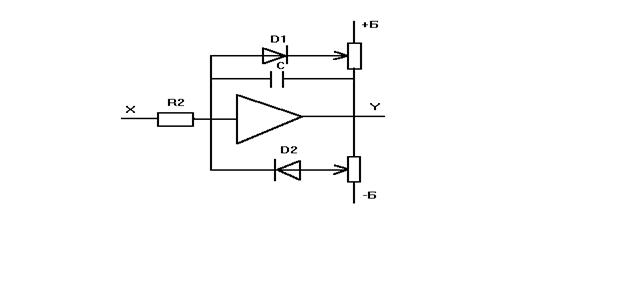 Рис. 4.4. Звено ограничения ( насыщения) выходного напряжения.
Рис. 4.4. Звено ограничения ( насыщения) выходного напряжения. - масштаб времени, определяемый отношением машинного времени к реальному. Машинное время должно быть не более 200 сек. Как правило,
- масштаб времени, определяемый отношением машинного времени к реальному. Машинное время должно быть не более 200 сек. Как правило,  принимается в пределах от одного до 20-ти.
принимается в пределах от одного до 20-ти. ,
,  ,
,  , (4.18)
, (4.18) - постоянная времени апериодического звена;
- постоянная времени апериодического звена; - коэффициент усиления для данной входной цепи, например, для
- коэффициент усиления для данной входной цепи, например, для  -
-  ;
; .
. (4.19).
(4.19). определяется по формуле
определяется по формуле (4.20).
(4.20). , то
, то  .
. ,
, (4.21).
(4.21). скорость двигателя равна 0. Это можно записать так: если
скорость двигателя равна 0. Это можно записать так: если  то
то  .
. (4.22).
(4.22). (4.23).
(4.23). и время интегрирования-
и время интегрирования-  , цикл печати
, цикл печати  .
.
 ,
, .
. .
. то перейти к концу цикла (10).
то перейти к концу цикла (10). , момент двигателя
, момент двигателя  , скорость
, скорость  далее необходимо обнулить количество циклов
далее необходимо обнулить количество циклов  .
. .
. должно равняться приблизительно
должно равняться приблизительно  времени разгона. Для составления программы целесообразно составить таблицу машинных обозначений параметров с указанием их значений.
времени разгона. Для составления программы целесообразно составить таблицу машинных обозначений параметров с указанием их значений. ,
, ТНЕN
ТНЕN 
 при отсутствии ПЭВМ по месту работы расчет переходного процесса можно выполнить на кафедре ЭАПУ на ПЭВМ с использованием программы под именем "аvk. ваs" Ниже приведен порядок работы на ПЭВМ.
при отсутствии ПЭВМ по месту работы расчет переходного процесса можно выполнить на кафедре ЭАПУ на ПЭВМ с использованием программы под именем "аvk. ваs" Ниже приведен порядок работы на ПЭВМ.


















 .
Какого типа это звено?
.
Какого типа это звено?
 ?
?
 ?
?
 .На какой оптимум в этом случае настраивается система?
.На какой оптимум в этом случае настраивается система?
 .
2.
.
2.  .
3.
.
3.  .
.
 ?
?
 .
2.Электромагнитная цепь обмотки возбуждения
.
2.Электромагнитная цепь обмотки возбуждения  .
3.Внутренняя обратная связь по ЭДС.
.
3.Внутренняя обратная связь по ЭДС.
 .
2.
.
2.  .
3.
.
3.  ,
,  ,
,