Назначение сборника состоит в том, чтобы упростить и ускорить процесс получения справки о назначении и правилах написания той или иной конструкции. Данные об основных конструкциях собраны в виде таблиц или коротких тематических разделов, имеют иерархический порядок нумерации и оглавление. Поиск нужной информации производится значительно быстрее, чем в документации или в учебном пособии - при этом размер сборника составляет всего 10 страниц текста! Сборник содержит только самые основные конструкции, но они вполне достаточны для решения большинства реальных учебных задач - от чисто вычислительных алгоритмов до серьезных задач в области графики и анимации, работы с файлами и указателями.
| главная | конспекты |
РАБОТА 7
МОДЕЛИРОВАНИЕ САР С НЕЛИНЕЙНЫМИ ДИФФЕРЕНЦИАЛЬНЫМИ УРАВНЕНИЯМИ
Цели работы:
• освоить понятия и отдельные вопросы, относящиеся к теории 1 автоматического регулирования нелинейных САР (понятия нелинейных динамических звеньев и систем);
• освоить методику моделирования процессов регулирования в1 нелинейных САР с помощью ПК «МВТУ». Последовательность выполнения работы:
• на простейшем демонстрационном примере освоить моделирование переходного процесса нелинейного колебательного!» звена с помощью блока Новый ПК «МВТУ» и приобрести навыки самостоятельной работы;
• по заданному варианту самостоятельно подготовить исходные данные для моделирования нелинейной САР высоты среза растений кукурузоуборочным комбайном и выполнить на компьютере все необходимые процедуры.
Теоретический материал, необходимый для выполнения лабораторной работы.Необходимо владеть понятиями, упомянутыми ранее, знать функциональные возможности ПК «МВТУ» и основные этапы работы в его среде. Помимо этого необходимо изучить порядок и процедуры работы с блоком Новый.
Демонстрационный пример.Для нелинейного колебательного звена подготовьте исходные данные и проведите моделирование переходного процесса в такой последовательности:
• с помощью блока Новый ПК «МВТУ» создайте динамическую модель нелинейного колебательного звена,;
• с использованием ОБЩЕТЕХНИЧЕСКОИ библиотеки (приложение А) на основе исходной структурной схемы составьте структурную схему моделирования;
• задайте метод интегрирования;
• задайте максимальный и минимальный шаги интегрирования;
• определите время интегрирования и число точек вывода расчетных данных;
• задайте точность интегрирования.
Исходные данные. Демонстрационный пример моделирования переходного процесса нелинейного динамического звена построен применительно к колебательному звену с переменным демпфированием колебаний.
Дифференциальное уравнение, описывающее связь входного и выходного сигналов звена:
где u(t) и y(t) — соответственно входной и выходной сигналы; а0, а1, а2, с, к — постоянные коэффициенты.
Произведение обусловливает нелинейность дифференциального уравнения.
Значения параметров: a0= 1; a1= 0,3; a2= 1; c=1;k= 1. Входной ступенчатый сигнал u(t) = 0,1...1.Моделирование проводят в среде ПК «МВТУ» по структурной схеме, показанной на рисунке 3.7.1. Формирование динамической Модели Нели-нейного колебательного звена осуществляется по средством блока Новый, позволяющего прямо в процессе работы создавать экземпляры блоков со своими оригинальными математическими моделями.
Демонстрационный пример предназначен для освоения процедур работы с блоком
Рис. 3.7.1. Структурная схема моделирования переходного процесса нелинейного колебательного звена, изображенная с использованием блоков библиотеки ПК «МВТУ»
Новый. Для вызова справки в ПК «МВТУ» необходимо при инициализированном блоке одновременно нажать клавиши Ctrlи F1или, установив курсор на блок, щелчком правой клавиши «мыши» вызвать «всплывающее» меню блока, в котором щелкнуть левой клавишей «мыши» по строке Свойства, а затем в открывшемся окне щелкнуть левой клавишей «мыши» по кнопке Помощь.
Новый блок функционирует на базе встроенного Интерпретатора математических функций. Диалоговое окно этого блока фактически представляет собой окно текстового редактора, в котором пользователь записывает математическую модель в виде, близком к естественной записи. Математическое описание блока соответствует многомерной нелинейной динамической системе в форме Коши:
где f(х, и), g(x, и) — известные нелинейные функции переменных состояния (х1, х2, ..., хп) и входных воздействий (u1, u 2, ..., u п).
Первое из уравнений системы может отсутствовать. В этом случае блок-интерпретатор выполняет алгебраические преобразования входных величин.
Рассмотрим процедуру формирования математической модели динамики нелинейного колебательного звена с использованием блока Новый.
Дифференциальное уравнение (7.1) представим в виде
Описание в форме Коши имеет вид
Тогда
Порядок выполнения. Создание динамической модели нелинейного колебательного звена посредством блока Новый, составление структурной схемы и моделирование переходных процессов проводятся в следующей последовательности.
Этап 1 — работа с блоком Новый. После запуска ПК «МВТУ» переместите курсор на кнопку Новыйи сделайте однократный щелчок левой клавишей «мыши» — откроется чистое Схемное Окно. Переместите курсор на «закладку» Динамические звенья, инициализируйте ее, переместите курсор на блок Новый, однократно щелкните левой клавишей «мыши» и «перенесите» в центр Схемного Окна блок Новый.
Сохраните набранную часть задачи с помощью командного меню (Файл, Сохранить как...) в заданном каталоге, в файле с оригинальным именем, например koleb_zw.prj(что означает колебательное звено).
В результате выполнения этих операций Схемное Окно примет
вид, показанный на рисунке 3.7.2.
Переместите курсор на блок Новый и двукратно щелкните левой клавишей «мыши» — откроется новое окно Редактор интерпретатора математических функций, в котором необходимо записать дифференциальные уравнения, соответствующие математической
Рнс. 3.7.2. Главное Схемное Окно с блокомНовый
модели нелинейного колебательного звена (7.3), начальные условия и значения коэффициентов в такой последовательности:
input u; {описание имени и размерности входной величины}
output xl; {описание имени и размерности выходной величины}
При записи функциональных зависимостей давать комментарии не обязательно. Приводимые комментарии необходимо заключать в фигурные скобки.
На рисунке 3.7.3 изображено окно Редактор интерпретатора математических функций, где в текстовом виде задана математическая модель динамики нелинейного колебательного звена. Формат записи очевиден из рисунка.
Первая исполняемая строка обязательно должна содержать оператор input,описывающий входные сигналы в данный блок, включая имя входа и его размерность.
В данном примере первая исполняемая строка (input u;)присваивает первому (и единственному) входу уникальное имя и. Если бы, например, этот блок имел два векторных входа, причем первый вход и — трехжильный, а второй вход g — пятижильный,
Рис. 3.7.3. Главное Схемное Окно с окном Редактор интерпретатора математических функций
Рис. 3.7.4. Главное Схемное Окно с блоком Новый после ввода математической модели в окно Редактор интерпретатора математических функций
то первая исполняемая строка имела бы вид: input u [3], g [5].Для описания размерности используют прямоугольные скобки.
Если блок Новый описывает динамику объекта моделирования в виде системы дифференциальных уравнений в форме Коши, то вторая исполняемая строка обязательно должна содержать оператор init,описывающий начальные условия динамических переменных, для которых далее по тексту записаны обыкновенные дифференциальные уравнения в форме Коши.
В данном примере вторая исполняемая строка initxl = 0, х2=0; задает нулевые начальные значения динамических переменных xl и х2.
В третьей исполняемой строке заданы значения коэффициентов: а0 = 1; al = 0.3; а2 = 1; с = 1; к = 1; а в четвертой и пятой исполняемых строках — дифференциальные уравнения в форме Коши, где символ апострофа обозначает производную по времени.
Последняя исполняемая строка блока Новый с выходными портами обязательно должна содержать оператор output,описывающий выходные сигналы из блока «Новый», включая имена выходов и их размерности.
В этом примере последняя строка (output xl;)описывает один выходной сигнал xl.
После ввода всего текста в окно Редактор интерпретатора математических функций переместите курсор на кнопку Да и однократно щелкните левой клавишей «мыши» — окно Редактор интерпретатора математических функций закроется и откроется Главное Схемное Окно (рис. 3.7.4), в котором «Новый» блок будет иметь один вход и один выход.
Сохраните с помощью командного меню набранную часть задачи, однократно щелкнув левой клавишей «мыши» по кнопке Сохранить.
Рис. 3.7.5. Главное Схемное Окно с введенной структурной схемой моделирования переходных процессов нелинейного колебательного звена в ПК «МВТУ»
Этап 2 — формирование в Схемном Окне структурной схемы моделирования (см. рис. 3.7.1). Используя известные процедуры заполнения Схемного Окна типовыми блоками, проведения линий связи на структурных схемах (см. лабораторную работу 1), дополните Схемное Окно с блоком Новый (см. рис. 3.7.4) необходимыми блоками и соедините их согласно исходной структурной схеме (см. рис. 3.7.1).
Сделайте соответствующие надписи на схеме. В результате выполнения этапа 2 Главное Схемное Окно должно иметь вид, аналогичный показанному на рисунке 3.7.5.
Сохраните с помощью командного меню набранную часть задачи, однократно щелкнув левой клавишей «мыши» по кнопке Сохранить.
Этап 3 — ввод параметров структурной схемы. Используя известные процедуры установки параметров блоков, рассмотренные влабораторной работе 1, введите значение ступенчатого входного воздействия 0,1 (при вводе дробная часть числа отделяется точкой: 0.1).
Этап 4 — моделирование переходного процесса. Переместите курсор на блок График y(t), двукратно щелкните левой клавишей «мыши» — откроется графическое окно. Переместите курсор на командную кнопку Продолжитьи щелкните левой клавишей «мыши» — вы запустили демонстрационный пример на счет. В графическом окне в процессе расчета будет отображаться график переходного процесса (рис. 3.7.6). Сделайте надписи на графике.
Сохраните с помощью командного меню задачу, однократно щелкнув левой клавишей «мыши» по кнопке Сохранить.
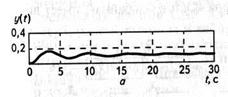
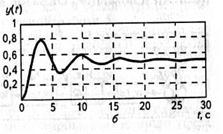
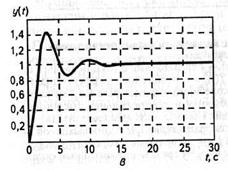
Этап 5 — анализ результатов моделирования переходного процесса. Проведите моделирование переходного процесса при других значениях (в диапазоне 0,1... 1,0) ступенчатого входного воздействия, например при 0,5 и 1,0. В результате моделирования должны быть получены графики переходных процессов, аналогичные графикам, показанным на рисунке 3.7.7.
Рис. 3.7.6. Схемное Окно с графическим окном
Определите логарифмический декремент затухания колебаний (см. раздел 1) при различных значениях ступенчатого входного воздействия.
Логарифмический декремент затухания колебаний рекомендуется вычислять не по графикам переходных процессов, а по значениям y(t), вызвав в графическое окно таблицу с результатами расчетов. Для этого после моделированияпереходного процесса переместите курсор в центральную часть графического окна и однократно щелкните правой клавишей «мыши» — появится командное меню графического окна, в котором однократно щелкните левой клавишей мыши по строке Список. Вместо графика появится таблица с результатами расчета переходного процесса. Механизм прокрутки позволяет последовательно просмотреть в графическом окне всю таблицу.
Рис. 3.7.7. Графики переходных процессов нелинейного колебательного звена при ступенчатом входном воздействии 0,1 (в), 0,5 (б) и 1,0 (в)
Для возвращения к графику следует повторить указанные операции.
Определите тенденцию изменения логарифмического декремента затухания колебаний при увеличении ступенчатых входных воздействий.
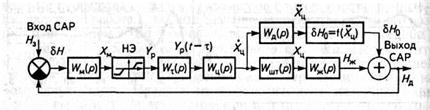
Индивидуальное задание.Его выполняют на базе САР высоты среза растений кукурузоуборочным комбайном. Отличие этой САР (рис. 3.7.8) от САР, рассмотренной в лабораторной работе 5, заключается в том, что остов комбайна представленв виде нелинейного колебательного звена.
Дифференциальное уравнение δH0= f(X”n), описывающее связь входного и выходного сигналов звена «Остов комбайна», имеет вид:
Wм(p), Wτ(p), Wц(p), Wшт(p), Wж(p), Wд(p) — передаточные функции звеньев сие- , темы; НЭ — нелинейный элемент; δH0= f(X”n) — нелинейное дифференциальное уравнение колебаний остова комбайна (колебаний зысоты среза δH0) от регулирующих воздействий САР; Н3и Hд — заданная и действительная высота среза; δH— сигнал рассогласования; Хм— входной сигнал гидрораспределителя; Yp — изменение ширины рабочих окон гидрораспределителя; Yp(t — τ) — выходной сигнал звена чистого запаздывания; Хц, Хц, Хц— перемещение, скорость и ускорение штоков гидроцилиндров; Hж — изменение высоты среза исполнительным органом
где а0, а1, а2, с, к — постоянные коэффициенты, зависящие от параметров звена «Остов комбайна»; у (t) = δH0 (t) — колебание высоты среза δH0 от регулирующих воздействий САР (выходной сигнал); u(t) = Xu(t)— ускорение штоков гидроцилиндров (входной сигнал).
В дифференциальном уравнении, описывающем динамические свойства звена «Остов комбайна», слагаемым csign : учитывается (дополнительно к модели, рассмот-ренной в демонстрационном примере) влияние сил сухого трения (в пятне контакта колес комбайна с почвой) на демпфирование продольно-угловых колебаний комбайна, а следовательно, и колебаний высоты среза растений. Как известно, силы сухого трения направлены против вектора скорости, что определяется знаковой функцией sign , которая обусловливает нелинейность дифференциального уравнения. Коэффициент с характеризует значение сил сухого трения.
Значения параметров звена «Остов комбайна»:
Значения Т1 ,Т22, k0 взяты из таблицы 3.5.3 (ЛР №5). Значения параметров остальных звеньев САР такие же, как в демонстрационном примере, рассмотренном в лабораторной работе 5.
На основе структурной схемы (см. рис. 3.7.8) для заданного варианта (см. табл. 3.5.2 и 3.5.3) подготовьте исходные данные для компьютерного моделирования САР:
определите параметры интегрирования (шаг и время интегрирования) и число точек выдачи данных, задайте метод интегрирования.
По аналогии с демонстрационным примером выполните компьютерное моделирование САР и по графику переходного процесса оцените ее качество. Исследуйте влияние коэффициента передачи шарнирно-рычажного механизма kмна показатели переходного процесса при положительных и отрицательных ступенчатых задающих воздействиях Н3, равных ±0,05; ±0,1; ±0,15 м. Определите границу устойчивости системы и выберите рациональное значение коэффициента, обеспечивающее необходимое качество САР. Определите параметры автоколебаний системы при коэффициентах передачи, превышающих критическое значение.
Содержание отчета. Вотчете должны быть структурная схема САР; структурная схема ее моделирования; математическая модель нелинейного динамического звена в виде уравнений Коши, подготовленная для записи в блок Новый ПК «МВТУ»; числовые данные, необходимые для работы в среде ПК «МВТУ»; график переходного процесса; результаты оценки качества системы; выводы по работе.
Контрольные вопросы и задания
1. Что такое нелинейное динамическое звено САР? 2. Что такое нелинейная САР? 3. Каковы назначение и возможности блока Новый ПК «МВТУ» при моделировании нелинейных САР? 4. Составьте структурную схему моделирования переходного процесса нелинейного динамического звена с помощью блока Новый ПК «МВТУ». 5. Составьте структурную схему моделирования нелинейной САР высоты среза растений кукурузоуборочным комбайном. 6. Каков принцип работы САР высоты среза растений кукурузоуборочным комбайном? 7. Почему САР высоты среза растений является нелинейной? 8. Какие исходные данные необходимы ( для моделирования САР в среде ПК «МВТУ»?


 обусловливает нелинейность дифференциального уравнения.
обусловливает нелинейность дифференциального уравнения.










 : учитывается (дополнительно к модели, рассмот-ренной в демонстрационном примере) влияние сил сухого трения (в пятне контакта колес комбайна с почвой) на демпфирование продольно-угловых колебаний комбайна, а следовательно, и колебаний высоты среза растений. Как известно, силы сухого трения направлены против вектора скорости, что определяется знаковой функцией sign
: учитывается (дополнительно к модели, рассмот-ренной в демонстрационном примере) влияние сил сухого трения (в пятне контакта колес комбайна с почвой) на демпфирование продольно-угловых колебаний комбайна, а следовательно, и колебаний высоты среза растений. Как известно, силы сухого трения направлены против вектора скорости, что определяется знаковой функцией sign 