Количественно степень адекватности модели и объекта можно оценить путем сравнения их выходных сигналов при подаче одинаковых входных воздействий на объект и его модель. Такое сравнение предпочтительное на основе новой информации, отличной от того множества данных, которое использовалось в процессе идентификации объекта. Структурная схема вычисления оценки ошибки модели статического объекта приведена на рис. 4.3.
Рис. 4.3. Структурная схема вычисления оценки ошибки модели
статического объекта
Пусть проведено l опытов при различных уровнях входных воздействий, из области их допустимых значений. В результате проведения опытов получены реализации выходов изучаемого объекта и выходы модели , .
Ошибки модели и для оценки ее адекватности вычисляются по формулам:
, .
, ,
где − абсолютная, приведенная и среднеквадратичная ошибки модели по i-му выходу ( ); − значение i-го выхода объекта и модели в j-ом опыте ( , ); − максимальное изменение i-го выхода объекта ( ) при допустимых значениях входов , из области.
Если величины этих ошибок меньше некоторого заданного положительного числа, то модель адекватна объекту.
Теперь рассмотрим оценку модели динамического объекта. Положим, что после идентификации получена модель одномерного объекта в форме линейного дифференциального уравнения вида
, (4.3)
где − входной сигнал модели; − выходной сигнал модели; n, m − наивысшие порядки производных; и соответственно .
Пусть получены реализации входа и выхода объекта на отрезке времени , где − длительность реализации (время наблюдения). Теперь качество модели можно оценить путем сравнения и либо непосредственно на графике (визуально),либо введя некоторую формальную меру расстояния между этими сигналами.
Выходные сигналы объекта и модели при одном и том же входном сигнале различаются, так как их дифференциальные уравнения и начальные состояния неидентичны. Для оценки адекватности модели и объекта введем критерий их близости по разности выходных сигналов, т.е. реакций на один и тот же входной сигнал, например следующего вида
, − выпуклая функция. (4.4)
В частности
(4.5)
В общем случае оценка адекватности проводится для различных форм входного сигнала . Отсюда следует идея необходимости усреднения по входным сигналам и начальным условиям, т.е. введения операции математического ожидания оценки :
. (4.6)
Выражение выходного сигнала имеет довольно сложный вид, что затрудняет аналитическое исследование зависимости от коэффициентов модели, поэтому вводятся и другие критерии. В частности, если уравнение модели имеет вид
, (4.7)
то для оценки близости модели и объекта удобным оказывается функционал от разности входных сигналов модели и объекта, обеспечивающих один и тот же выходной сигнал
. (4.8)
при условии, что . Выходной сигнал модели и объекта будем обозначать. Тогда, подставляя (4.6) в (4.7), имеем
, (4.9)
т.е. функционал в явном виде зависит от коэффициентов модели, что удобно для аналитического исследования.
Развивая эту идею, можно формализовать удобный функционал для общего случая модели (4.3)
. (4.10)
Выражение (4.11)
называется обобщенной ошибкой модели. В качестве функции , как правило, принимают квадрат обобщенной ошибки
. (4.10)
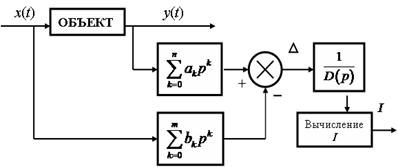
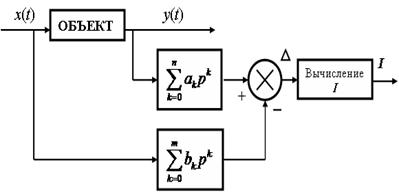
Этот функционал удобен тем, что в явном виде зависит от параметров модели и от доступных измерению входного и выходного сигналов объекта. Однако при вычислении этого функционала возникают определенные трудности, связанные с дифференцированием сигналов и , а также с необходимостью выполнения операции математического ожидания. Структурная схема вычисления обобщенной ошибки и оценки критерия I представлена на рис. 4.4, где − оператор дифференцирования.
Однако по условиям физической реализуемости можно создавать лишь устройства, порядок числителя которых меньше (или равно) порядка знаменателя, т.е. можно реализовать устройства с операторами вида
, ,
где − многочлен степени больше или равно ; .
Рис. 4.4. Схема вычисления обобщенной ошибки и
оценки критерия I
Тогда структурная схема вычисления обобщенной ошибки и оценки критерия I будет иметь вид, представленный на рис. 4.5.
Структурной схеме, изображенной на рис. 4.5, эквивалентна схема, приведенная на рис.4.6 (вариант 2).
Таким образом, обобщенная ошибка , измеряемая с помощью физически реализуемых устройств, отличается от обобщенной ошибки тем, что является результатом преобразования фильтром с передаточной функцией . В силу конечности полосы пропускания этого фильтра происходят искажения сигнала обобщенной ошибки. Эти искажения будут тем меньше, чем больше полоса пропускания фильтра.
Если величина ошибок модели и оценок критериев приближения удовлетворяют требованиям к качеству модели, то модель считается адекватной объекту и может быть использована для решения задач моделирования, оптимизации и управления. В противном случае модель необходимо усовершенствовать путем изменения структуры и введения в нее неучтенных ранее факторов.


 из области
из области  их допустимых значений. В результате проведения опытов получены реализации выходов изучаемого объекта
их допустимых значений. В результате проведения опытов получены реализации выходов изучаемого объекта  и выходы модели
и выходы модели  ,
,  .
. и
и  для оценки ее адекватности вычисляются по формулам:
для оценки ее адекватности вычисляются по формулам: ,
,  .
. ,
, 
 − абсолютная, приведенная и среднеквадратичная ошибки модели по i-му выходу (
− абсолютная, приведенная и среднеквадратичная ошибки модели по i-му выходу (  − значение i-го выхода объекта и модели в j-ом опыте (
− значение i-го выхода объекта и модели в j-ом опыте (  − максимальное изменение i-го выхода объекта (
− максимальное изменение i-го выхода объекта (  ,
,  из области
из области  .
. , (4.3)
, (4.3) − входной сигнал модели;
− входной сигнал модели;  − выходной сигнал модели; n, m − наивысшие порядки производных;
− выходной сигнал модели; n, m − наивысшие порядки производных;  .
. , где
, где  − длительность реализации (время наблюдения). Теперь качество модели можно оценить путем сравнения
− длительность реализации (время наблюдения). Теперь качество модели можно оценить путем сравнения  либо непосредственно на графике (визуально),либо введя некоторую формальную меру расстояния между этими сигналами.
либо непосредственно на графике (визуально),либо введя некоторую формальную меру расстояния между этими сигналами. , например следующего вида
, например следующего вида ,
,  − выпуклая функция. (4.4)
− выпуклая функция. (4.4) (4.5)
(4.5) . Отсюда следует идея необходимости усреднения по входным сигналам и начальным условиям, т.е. введения операции математического ожидания оценки
. Отсюда следует идея необходимости усреднения по входным сигналам и начальным условиям, т.е. введения операции математического ожидания оценки  :
: . (4.6)
. (4.6) от коэффициентов модели, поэтому вводятся и другие критерии. В частности, если уравнение модели имеет вид
от коэффициентов модели, поэтому вводятся и другие критерии. В частности, если уравнение модели имеет вид , (4.7)
, (4.7) модели и объекта, обеспечивающих один и тот же выходной сигнал
модели и объекта, обеспечивающих один и тот же выходной сигнал . (4.8)
. (4.8) . Выходной сигнал модели и объекта будем обозначать
. Выходной сигнал модели и объекта будем обозначать  , (4.9)
, (4.9) . (4.10)
. (4.10) (4.11)
(4.11) . (4.10)
. (4.10) − оператор дифференцирования.
− оператор дифференцирования. ,
,  ,
, − многочлен степени больше или равно
− многочлен степени больше или равно  ;
;  .
.
 и оценки критерия I будет иметь вид, представленный на рис. 4.5.
и оценки критерия I будет иметь вид, представленный на рис. 4.5.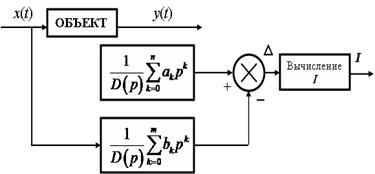
 , (4.11)
, (4.11) . (4.12)
. (4.12) тем, что
тем, что  . В силу конечности полосы пропускания этого фильтра происходят искажения сигнала обобщенной ошибки. Эти искажения будут тем меньше, чем больше полоса пропускания фильтра.
. В силу конечности полосы пропускания этого фильтра происходят искажения сигнала обобщенной ошибки. Эти искажения будут тем меньше, чем больше полоса пропускания фильтра.