Заданием этого параметра определяется, каким образом робот заканчивает перемещение.
Существует два способа окончания перемещения - Fine и CNT.
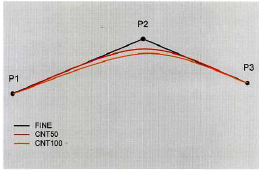
FINE.
При установке данного параметра робот в заданной точке останавливается.
CNT.
При установке данного параметра робот приближается к заданной точке, но не останавливается, а продолжает движение к следующей точке.
Изменяя аргумент параметра в пределах 0 – 100, можно задавать разное торможение и расстояние подхода робота к точке.
Примечание. Если после инструкции, содержащей параметр CNT, исполнить программную команду (например WAIT), робот все же остановиться в конечной точке.
