Включение добавочного резистора в цепь обмотки якоря двигателя параллельного возбуждения применяют для регулирования его скорости ( рис. 3.5, а ).
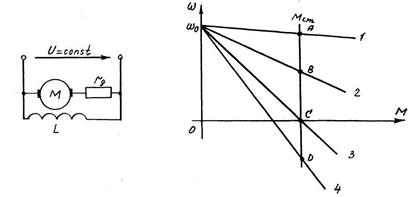
Рис. 3.5. Схема двигателя параллельного возбуждения ( а ) и его механические
характеристики ( б ) при введении резистора в цепь обмотки якоря ; 1 – естествен-
ная механическая характеристика 2, 3 и 4 – искусственные механические характе-
ристики
При этом увеличивается общее ( суммарное ) сопротивление цепи якоря, что приво
дит к увеличению перепада скорости
Δω =  ,
,
однако при этом скорость идеального холостого хода
ω  =
= 
не изменяется.
Следовательно, при различных значениях сопротивления добавочного резистора r  получим ряд искусственных механических характеристик, проходящих через одну и ту же точку, соответствующую скорости идеального холостого хода ω , причем наклон характеристик тем больше, чем больше значение сопротивления r ( рис. ***, б ).
получим ряд искусственных механических характеристик, проходящих через одну и ту же точку, соответствующую скорости идеального холостого хода ω , причем наклон характеристик тем больше, чем больше значение сопротивления r ( рис. ***, б ).
В точке В на искусственной механической характеристике 2 двигатель работает с пониженной скоростью.
Точке С на характеристике 3 соответствует режим стоянки под током, в точке D
на характеристике4 двигатель работает в режиме тормозного спуска ( в электроприводах грузоподъемных механизмов и якорно-швартовных устройств ).
Пределы регулирование скорости – от номинальной до нуля ( точки А и С ).
Эти искусственные характеристики называют реостатными.
