Значительное место среди мероприятий по экономии энергоресурсов занимает автоматизация процесса потребления электроэнергии. Актуальной задачей является разработка автоматов и систем автоматического управления параметрами важных промышленных установок, одной из которых является электрическая печь большой мощности.
Передаточная функция линейной модели определена как
(9.1)
где Полученные в результате экспериментальных измерений значения постоянных времени и коэффициента усиления следующие: T1=122 с, T2=14,5с, τ = 3,9 с, Ко= 7,2 °С/ % (управляющее воздействие на объект управления задается в процентах перемещения регулирующего органа).
Структурная схема системы управления температурой электропечи, выполненная в интерактивной системе MATLAB, приведена на рис.9.1. Усилитель имеет насыщение с уровнем 5=18. Поэтому при больших управляющих воздействиях на объект управления система становится нелинейной.
Для объекта управления в системе автоматического управления электропечью предлагается использовать аналоговый ПИД-регулятор с передаточной функцией
(9-2) где оптимальными коэффициентами являются следующие:
К = 4,84%° С; К1. =0,246%°С/с; Kd=43,32% с/0С
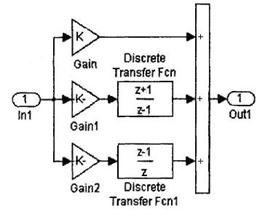
В системе MATLAB передаточная функция цифрового ПИД-регулятора (на рис.9.1 регулятор обозначен блоком РШ) может быть записана различными способами, поскольку интегрирование и дифференцирование в цифровой форме может быть выполнено различными методами. Аппроксимируя производную первой разностью и используя интегрирование на основе трапецеидальной аппроксимации запишем передаточную функцию цифрового ПИД-регулятора в виде
(9.3)
где h0- шаг дискретизации (шаг моделирования). Структурная схема цифрового ПИД-регулятора приведена на рис.9.2. При малых шагах моделирования цифровой ПИД-регулятор эквивалентен ангалоговому. Ниже представлены результаты исследования системы с цифровым ПИД-регулятором. При произвольном входном воздействии u{t),
которое изменяется с максимальной скоростью (Οπαοίи максимальным ускорением гтах, удобно рассматривать эквивалентное гармоническое воздействие u3(t) = U3sinCi}J, параметры которого определяются из соотношений [9]: В свою очередь,
если заданы параметры эквивалентного гармонического воздействия, то максимальная скорость и максимальное ускорение произвольного входного воздействия находятся из соотношений:
Исследование системы с цифровым ПИД-регулятором показывает, что переходные процессы в системе имеют весьма большое перерегулирование (до 50%) и большое время регулирования (до 100 с), но в установившемся режиме слежения за гармоническим сигналом текущая ошибка весьма мала. В качестве примера процессы в системе (см. рис.9.1) с цифровым ПИД-регулятором при поступлении на вход системы воздействия
(9.4)
где U3= 0,2; w3 = π /180 = 1,74 · 10-2рад/с, изображены на рис.9.3.
Следует отметить, что гармонический сигнал (период сигнала равен 360 с) является быстроменяющимся для данной системы (постоянные времени в объекте управления 122с и 14,5с). При уменьшении частоты входного сигнала текущая ошибка в установившемся режиме слежения будет еще меньше, но перерегулирование и время регулирования остаются такими же большими.
Проведем синтез оптимального по быстродействию цифрового регулятора для рассматриваемого объекта управления. Передаточную функцию такого регулятора можно получить на основании известных оптимальных управляющих воздействий, поступающих на объект
управления при линейно-изменяющимся воздействии на входе системы. Для слежения за произвольным входным воздействием, которое аппроксимируется линейно-изменяющимся, на выходе регулятора введем дополнительно интегрирующее звено (для придания системе астатизма первого порядка).
Тогда для объекта с передаточной функцией
(9.5)
управляющие воздействия на каждом интервале регулирования длительностью t определяются в виде:
Цифровой регулятор на каждом подинтервале ntp<t<ntp+3h интервала регулирования можно описать передаточной функцией
(9.7) или разностным уравнением
(9.8)
где в = AU при индексе i-k>0 и 0 = О, m = О при i - к < 0.
В момент начала n-го интервала регулирования длительностью , т.е. в момент ntp, первую разность (среднюю скорость) входного воздействия на систему управления u(t) на интервале регулирования
(9.9)
измерить невозможно (за исключением тех случаев, когда входное воздействие заранее задано), поэтому будем измерять текущее значение скорости входного воздействия
(9.10)
где h0- шаг моделирования, и использовать приближенное значение первой разности
(9.11)
Первая разность (средняя скорость) входного воздействия на предыдущем интервале регулирования определяется как
(9.12)
Тогда приращение скорости на интервале регулирования определяется как
(9.13)
Для математических моделей объектов управления с чистым запаздыванием (см. формулу (9.5)) можно предложить несколько вариантов структурных схем оптимальных по быстродействию цифровых регуляторов, которые зависят от соотношения времени запаздывания Т и шага квантования в цифровом регуляторе h. Рассмотрим вариант оптимального по быстродействию цифрового регулятора, для которого примем (Т в реальном объекте равно 3,9с).
Структурная схема такого регулятора, составленная на основании выражений (9.6) и (9.10)-(9.13) в интерактивной системе MATLAB, приведена на рис.9.4 (на рис.9.1 оптимальный по быстродействию цифровой регулятор обозначен блоком Subsystem).
На рис.9.3 (справа) показаны переходные процессы при наличии в системе оптимального по быстродействию цифрового регулятора. Данный регулятор обеспечивает апериодический (без перерегулирования) переходный процесс со временем регулирования, не превышающим 30 с. Таким образом, быстродействие системы с данным регулятором превышает быстродействие системы с ПИД-регулятором более чем в 3 раза. Кроме того, система с цифровым ПИД-регулятором имеет перерегулирование 50%.
Текущая ошибка в системе с оптимальным по быстродействий регулятором хотя и превышает ошибку рассогласования в системе с ПИД-регулятором, но достаточно мала.
При программной реализации регуляторов на микро-ЭВМ меньшая структурная сложность цифрового ПИД-регулятора не является большим преимуществом. Поэтому для практического использованияможно рекомендовать оптимальный по быстродействию цифровой регулятор.
Структурная схема системы управления температурой электропечи с цифровым нечетким регулятором, выполненная в интерактивной системе MATLAB, приведена на рис.9.5 (структурная схема регулятора приведена на рисунке отдельно).
Синтез нечеткого регулятора выполнен по формулам (3.1)-(3.13) для треугольных функций принадлежности с шагом квантования (шагом поступления данных в нечеткий регулятор) h = 0,01 с. Ошибка на выходе АЦП в(к) в каждом канале управления, ее первая
и вторая разно-
сти подаются на вход регулятора. Сигнал с выхода регулятора поступает на ЦАП (фиксатор нулевого порядка с передаточной функцией
и далее на вход объекта управления.
В нечетком регуляторе настраиваются диапазоны изменения входных и выходной переменных
всех функций принадлежности: где и - параметр (элемент) единого универсального множества U = [0,1]. Для уменьшения числа параметров настройки диапазоны
изменения переменных приняты симметричными: и т. д.
Настройка нечеткого регулятора производилась с целью получения минимальной текущей ошибки рассогласования.
На рис.9.6 показаны переходные процессы при наличии в системе цифрового нечеткого регулятора при поступлении на вход системы суммы единичного ступенчатого и эквивалентного гармонического воздействий: u3(t) = 1 + 0,2sin(nt/180). Данный регулятор обеспечивает близкий к апериодическому (с небольшими колебаниями) переходный процесс с временем регулирования, не превышающим 30 с, и достаточно малую текущую ошибку.
Изложим простой способ идентификации параметров электропечи как объекта управления [93].
Задача параметрической идентификации заключается в определении параметров математической модели объекта при заданной (известной) структурной схеме объекта. Известно большое число методов идентификации. Широкое применение при идентификации линейных стационарных объектов находят различные частотные методы, метод переходной функции, различные регрессионные методы (включая метод наименьших квадратов). Для идентификации объектов активными методами в качестве входных воздействий наиболее часто используются сигналы синусоидальной формы или ступенчатые воздействия.
Параметрическая идентификация, когда известна структура объекта управления (его передаточная функция) и требуется определить лишь величины параметров, называется идентификацией в узком смысле. Такая идентификация, при которой априорная информация об объекте управления достаточно обширна, в наибольшей степени соответствует реальным условиям проектирования и поэтому широко используется в инженерной практике.
Рассмотрим задачу определения неизвестных параметров объекта с передаточной функции (9.1). Для этого составим модель с такой же передаточной функцией
(9.14)
На вход объекта управления и на вход модели будем подавать сигналы u(t) синусоидальной формы или ступенчатые воздействия, а разность выходов (ошибку - θ(ί)) подадим на блок вычисления критерия качества. Выберем квадратичный критерий качества идентификации, который получил наибольшее распространение, и будем минимизировать этот критерий путем изменения параметров модели. Математическую запись критерия представим в виде
(9.15)
где ошибка θνвычисляется с шагом моделирования h0, а число L
определяет интервал наблюдения.
Общая схема идентификации параметров объекта управления приведена на рис.9.7.
При заданном входном воздействии u(t) ошибка θ{t), а значит, и критерий качества идентификации зависят от параметров модели
(9.16)
Минимизация критерия качества представляет собой задачу оптимизации параметров модели. Оптимальные (наиболее близкие к неизвестным параметрам объекта управления) параметры модели соответствуют минимальному значению критерия качества.
Для минимизации критерия качества (9.15) можно использовать различные алгоритмы условной и безусловной оптимизации. Достаточно хорошие результаты дает применение модифицированного метода условной оптимизации Хука-Дживса.
Суть метода Хука-Дживса заключается в следующем. Вначале вычисляют функционал J = F(a,b,a,T) в базисной точке. Затем в каждую переменную по очереди изменяют путем прибавления или вычитания длины шага Нк. Если такое изменение переменных приводит к уменьшению функционала, то для получения минимального функционала находят новую базисную точку. Если такое изменение переменных не приводит к уменьшению функционала, то изменяют длину шага (обычно берут Нк / 10), и, повторяя процедуру, получают новую базисную точку. Каждый раз, когда вновь полученная базисная точка отличается от предыдущей, проводят поиск по образцу (т. е. двигаются в направлении от предыдущей базисной точки к полученной). При этом каждую переменную изменяют по формуле Рк = 2ск - dk, где Рк -значение к-й переменной в точке образца; ск - значение к-й переменной в последней точке; dk - значение k-й переменной в предыдущих базисных точках. Поиск завершается, когда длина шага уменьшится до заданного малого значения.
Чем меньше параметров объекта управления, требующих идентификации, тем точнее параметры модели определяют параметры объекта. Часто наиболее просто можно определить другими методами, например, коэффициент усиления и время задержки. Тогда более точно определяются постоянные времени объекта управления.
Моделирование апериодического звена с передаточной функцией
(9.17)
где Ь = 1/Т, выполняем по рекуррентной формуле (по методу трапеций) [1]
(9.18)
с шагом моделирования h0. В формуле (9.18) Un - входная, а хп-выходная переменные звена.
Для моделирования звена чистого запаздывания поступим следующим образом. Вначале запишем передаточную функцию этого звена в виде приближения Паде второго порядка:
(9.19)
Запишем рекуррентную формулу (по методу трапеций) для моделирования колебательного звена с дифференцирующим второго порядка:
(9.20)
(8)
где а = 1/7"2; b = 2ξΙΤ\с = МТ*\d = 2ςΙΤΛ. Для этого звена рекуррентная формула (по методу трапеций) определена в виде[1]:
В записанных рекуррентных формулах Un - входная, х2пи х3п - промежуточные, a xlrt - выходная переменные звена.
Очевидно, при а = с = 12/т и d =—b = -6/Τ формула (9.20) совпадает с формулой (9.19) и рекуррентные формулы применима для расчета звена чистого запаздывания.
Проверка эффективности работы общей структуры, представленной на рис.9.7, выполняем следующим образом. Задаем параметры объекта управления: K0 =7,2, T1 =122с, Т2=14,5с, τ = 3,9с (эти
параметры приведены для реальной электропечи в работе [2]). Полагаем, что коэффициент усиления определен заранее и для модели KQ=KQ. Задаем входное воздействие u(t). Задаем начальные значения постоянных времени модели, отличающиеся от постоянных времени объекта на ± 50% .Запускаем программу оптимизации Хука-Дживса.
Заключаем, что изложенный способ параметрической идентификации позволяет получать достаточно точные значения параметров объекта управления.
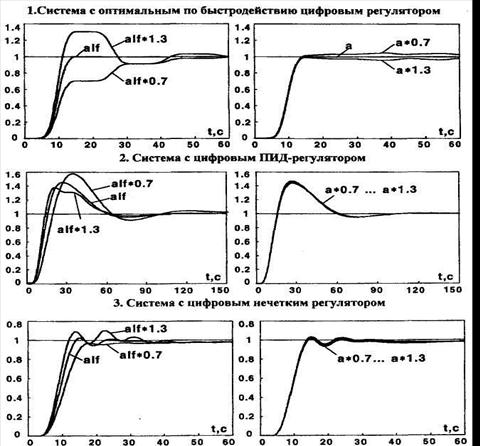
Представляет практический интерес рассмотреть переходные процессы в системе автоматического управления электропечью с рассмотренными цифровыми регуляторами при условии неточного задания параметров передаточной функции (9.1). Допустим, что регуляторы настроены на указанные выше параметры а, а, Ь, Τ, а реальные параметры а и а значительно отличаются. Эта ситуация иллюстрируется на рис.9.8. Неточное задание параметра а (т.е. наибольшей постоянной времени электропечи) мало влияет на форму переходного процесса в системе, использующей любой (из рассмотренных типов) регулятор. Однако неточное задание параметра а приводит и значительной деформации переходного процесса, особенно в системе с оптимальным по быстродействию цифровым регулятором, в которой, кроме того, длительность переходного процесса значительно увеличивается.
Интересно отметить, что величина первой ступеньки в переходном процессе в системе с оптимальным по быстродействию цифровым регулятором точно равна коэффициенту, на который умножается параметр а, что дает возможность определить этот параметр с высокой точностью при условии известных остальных параметров передаточной функции объекта.

 (9.1)
(9.1) Полученные в результате экспериментальных измерений значения постоянных времени и коэффициента усиления следующие: T1=122 с, T2=14,5с, τ = 3,9 с, Ко = 7,2 °С/ % (управляющее воздействие на объект управления задается в процентах перемещения регулирующего органа).
Полученные в результате экспериментальных измерений значения постоянных времени и коэффициента усиления следующие: T1=122 с, T2=14,5с, τ = 3,9 с, Ко = 7,2 °С/ % (управляющее воздействие на объект управления задается в процентах перемещения регулирующего органа). (9-2) где оптимальными коэффициентами являются следующие:
(9-2) где оптимальными коэффициентами являются следующие: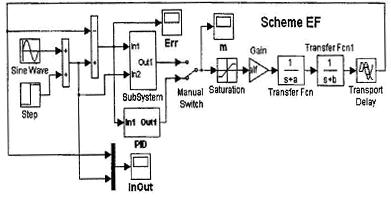
 (9.3)
(9.3) В свою очередь,
В свою очередь,

 (9.4)
(9.4)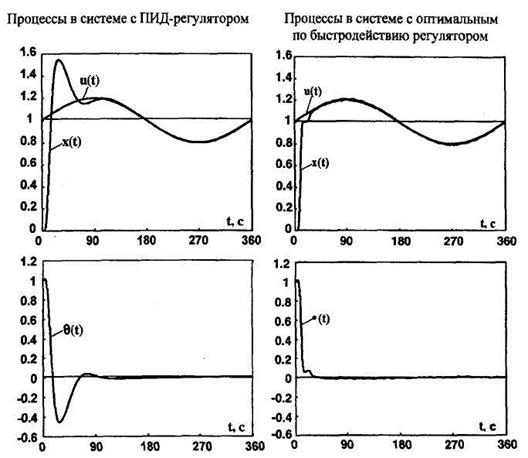
 (9.5)
(9.5)
 можно описать передаточной функцией
можно описать передаточной функцией (9.7) или разностным уравнением
(9.7) или разностным уравнением (9.8)
(9.8) , т.е. в момент ntp, первую разность (среднюю скорость) входного воздействия на систему управления u(t) на интервале регулирования
, т.е. в момент ntp, первую разность (среднюю скорость) входного воздействия на систему управления u(t) на интервале регулирования 
 (9.9)
(9.9) (9.10)
(9.10)








 (9.11)
(9.11) определяется как
определяется как (9.12)
(9.12)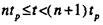 определяется как
определяется как (9.13)
(9.13) (Т в реальном объекте равно 3,9с).
(Т в реальном объекте равно 3,9с).
 и вторая
и вторая  разно-
разно- и далее на вход объекта управления.
и далее на вход объекта управления.
 всех функций принадлежности:
всех функций принадлежности:  где и - параметр (элемент) единого универсального множества U = [0,1]. Для уменьшения числа параметров настройки диапазоны
где и - параметр (элемент) единого универсального множества U = [0,1]. Для уменьшения числа параметров настройки диапазоны
 и т. д.
и т. д.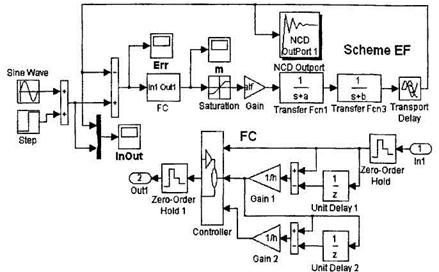
 после настройки
после настройки
 (9.14)
(9.14) (9.15)
(9.15) (9.16)
(9.16)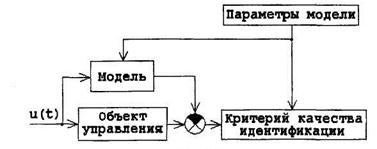
 (9.17)
(9.17)
 (9.18)
(9.18) (9.19)
(9.19) (9.20)
(9.20)