Фотоприемники выпускаются в виде отдельных элементов или модулей, состоящих из фотодиода и предусилителя. Современные модули легки, миниатюрны, надежны, имеют хорошие частотные характеристики и низкий уровень шума. Их номенклатура постоянно расширяется. Большинство существующих приемников имеет в области максимальной чувствительности относительно узкую полосу пропускания (порядка 30 МГц) и предназначены для работы в области волн 0,8...0,9 мкм. Для более длинноволновой области спектра (1,3...1,6 мкм), в которой значения параметров кварцевых ВОЛС близки к оптимальным значениям, детекторы менее совершенны и являются предметом исследований и опытно-конструкторских работ. Для передачи информации с высокими скоростями, как правило, приходится разрабатывать приемники с учетом применения их в заданных условиях, включая и особенности окружающей среды. Эти условия фиксируются на этапе определения системных требований и ограничений к проектируемому приемнику. Одним из основных вопросов при проектировании приемника является решение вопроса об использовании цифровой или аналоговой модуляции. После выбора и расчета схемы (см. гл. 6) модулятора производят расчет уровня шума приемника в полосе частот сигнала принятой системы передачи. В ходе определения уровня шума учитываются все его компоненты, а также возможность ослабления шумов за пределами полосы частот передаваемых сигналов. На основании этих расчетов оценивается отношение сигнал-шум на входе системы.
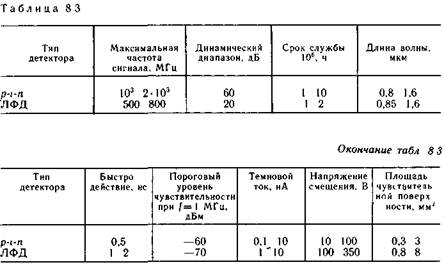
Выбор конкретного типа фотодетектора осуществляется по заданному значению рабочей длины волны, уровню сигнала на входе фотодетектора, допустимых нелинейных искажений и дополнительных шумов. Выбранный тип или модуль детектора должен обеспечивать максимальную мощность электрического сигнала при заданной оптической мощности, высокую надежность и стабильность основных характеристик при заданных условиях эксплуатации, иметь небольшие размеры и невысокую стоимость. В настоящее время этот выбор ограничивается в основном двумя типами фотодетекторов: p-i-n и ЛФД. В табл. 8.3 приведены средние значения основных параметров этих фотодетекторов.
После определения источника излучения и фотодетектора выбирают предуси-литель из следующих двух типов: интегрирующий на полевых (ПТ) или биполярных (БТ) транзисторах и с изменяющейся обратной связью. При малых скоростях передачи информации часто используют интегрирующие усилители на ПТ, а при высоких скоростях (100 Мбит/с и выше)—интегрирующие усилители на БТ.
Для достижения высокой чувствительности приемников в диапазоне 1,3...1,6 мкм с p-i-n детекторами необходимы усилители со сверхнизким уровнем шумов. С этой целью в настоящее время исследуются ПТ на основе GaAs в сочетании с диодами на основе GaAs.
Установив уровень шумов, рассчитывают минимальный уровень детектируемого сигнала, который определяется наименьшей величиной оптической мощности принимаемого сигнала, генерирующего ток, равный шумовому току в полосе частот сигнала. Затем вычисляют мощность сигнала, обеспечивающую заданное отношение сигнал-шум. Если результаты расчетов показывают, что требуемых уровней сигнала достичь не удается, то следует выбрать лучший фотодетектор либо изменить рабочую полосу частот сигналов.
Следующий этап проектирования приемника состоит в рассмотрении динамического диапазона ретранслятора. На этом этапе определяется не только динамический диапазон ретранслятора при нормальных условиях его работы, учитываются влияния изменяющихся факторов окружающей среды:
□ различия в длине линий связи между ретрансляторами и терминалами;
□ изменения технических характеристик компонентов и параметров передачи ВОЛС во времени;
□ колебания температуры окружающей среды;
□ влияния внешних электромагнитных полей, включая засветку фотодетектора и электрическую схему приемника.
При расчете характеристик приемника обычно предусматриваются наихудшие варианты изменения параметров системы. Если ожидаемые изменения технических характеристик приемника недопустимо велики, то в проекте предусматриваются мероприятия по их стабилизации. Примерами таких мероприятий являются:
□ установка схемы температурной стабилизации;
□ предусмотрение определенного запаса динамического диапазона и ширины полосы приемника;
□ введение защитных устройств от влияния внешних электромагнитных полей, влаги, механических нагрузок (например, вибраций, возникающих на летательных аппаратах) и т. д.