Кинетическая энергия мех. системы равна сумме кинетических энергий всех ее МТ:
T= STi= Smiui2/2. (14-54)
Выберем неподвижную систему отсчета Oxyz, в которой движется система точек. В качестве подвижной возьмем систему осей x,h,z, проведенных через центр масс системы параллельно неподвижным осям x,y,z и движущихся с центром масс поступательно. В этом случае абсолютная скорость любой точки рана геометрической сумме скорости центра масс и относительной скорости этой точки в ее движении относительно центра масс
ui=uC+ uir. (14-55)
Из векторной алгебры следует, что скалярное произведение двух одинаковых векторов равно квадрату их модуля
где Jz - момент инерции тела относительно оси вращения.
При сферическом движении
T= (1/2)JWw2,(14-59)
где w - мгновенная угловая скорость тела; JW - момент инерции тв. тела относительно мгновенной оси вращения.
В общем случае движения
T= (1/2)muC2+ (1/2)JCWw2. (14-60)
Изменение кинетической энергии механической системы на некотором перемещении равно сумме работ внешних и внутренних сил, действующих на материальные точки системы на этом перемещении.
Для твердого тела, т.к. работа внутренних сил равна нулю, это принимает форму уравнения
Т2 – Т1= SАiE. (14-61)
14.12. Механический коэффициент полезного действия.
При установившемся движении механизма работа движущих сил равна абсолютной величине работы сил сопротивления, куда входят силы, совершающие полезную работу, силы, совершающие отрицательную работу( трения, сопротивления воздуха и т.п.), т.е.
Азатр= Аполезн+ Асопр.
Механический к.п.д. равен отношению полезной работы к затраченной
h= Аполезн/ Азатр< 1. (14-62)
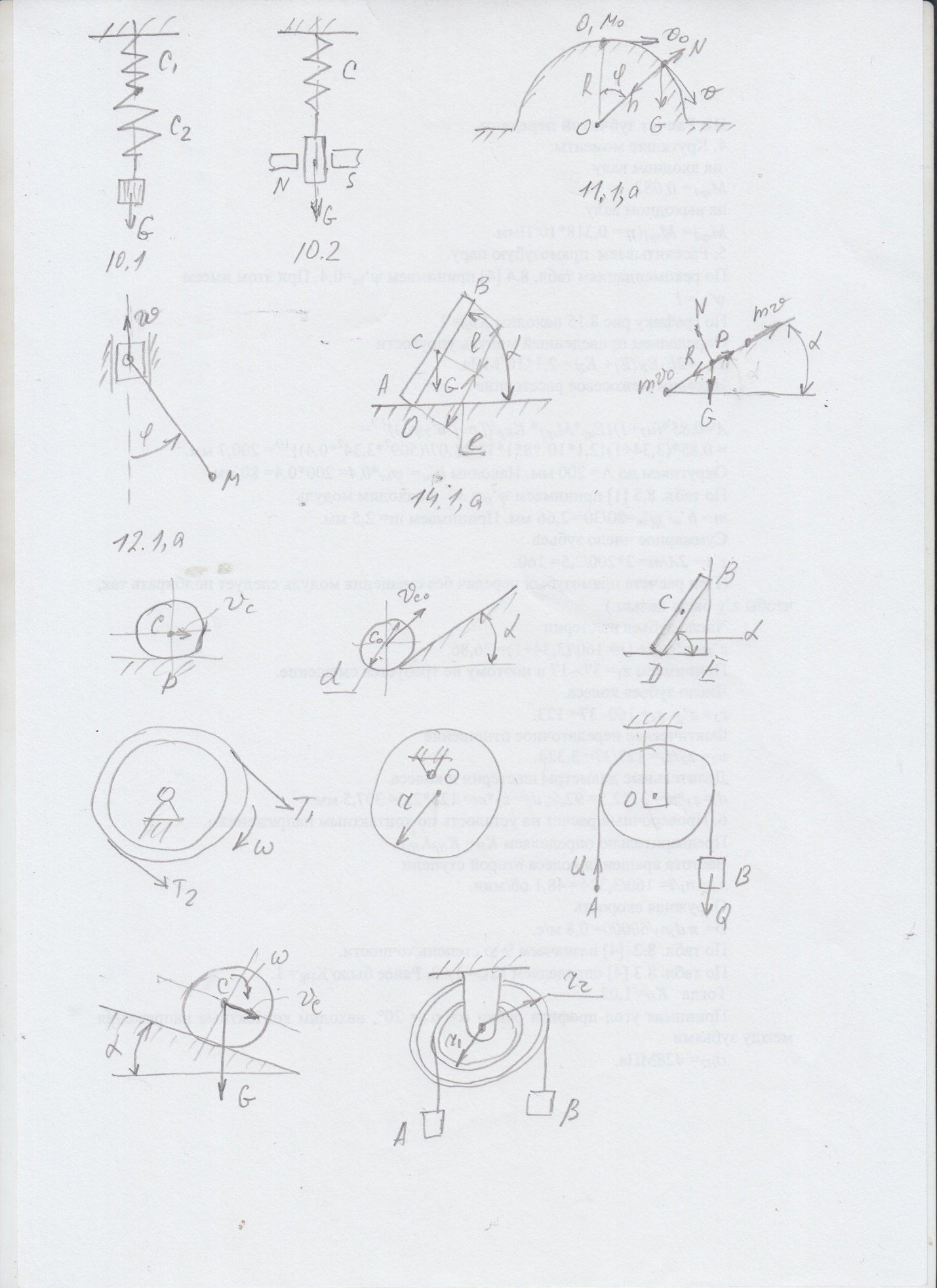
Пример 14.3 Однородный стержень BD длиной l= 0,8 м опирается на гладкую стену и гладкий пол. a= 60°. (рис.14.15)Стержень падает, оставаясь в одной и той же плоскости.
Определить скорость конца В в момент удара его о пол.
Рис. 14.15
Решение. При падении мгновенный центр скоростей стержня находится в точке пересечения перпендикуляров к скоростям точек В и D.
В момент падения стержня на пол МЦС оказывается в точке D.
Для определения скорости точки В применим уравнение (14-61)
Т– Т0= SАiE.,
Где Т0=0.
Вычислим кинетическую энергию в момент падения
T= (1/2)muC2+ (1/2)JCzw2.
Выразим скорость центра масс и угловую скорость
uС/uB= DC/DB= (½)l/l= ½.
Откуда
uС=(1/2) uB; w=uВ/DB
Или
w=uВ/l.
Момент инерции однородного стержня относительно оси Сz
Силовым полем называется физическое пространство, удовлетворяющее условию, при котором на точки механической системы, находящиеся в этом пространстве, действуют силы, зависящие от положения этих точек или от положения точек и времени (но не от их скоростей).
Силовое поле, силы которого не зависят от времени, называется стационарным (поле сил тяжести, поле силы упругости ).
Стационарное силовое поле называют потенциальным, если существует такая функция, однозначно зависящая от координат точек системы, через которую проекции силы на координатные оси в каждой точке поля выражаются так:
Xi= ¶U/¶xi; Yi= ¶U/¶yi; Zi= ¶U/¶zi. (14-63)
Функцию
U=U(x1,y1, z1, x2,y2, z2,… xn,yn, zn) (14-64)
называют силовой функцией.
Силовая функция определяется с точностью до постоянной.
Если силовое поле является потенциальным, то элементарная работа сил в этом поле равна полному дифференциалу силовой функции.
В этом поле работа сил поля на конечном перемещении механической системы из положения [1] в положение [2]
A1,2= =U2- U1, (14-65)
т.е. работа сил, действующих на точки механической системы в потенциальном поле, равна разности значений силовой функции в конечном и начальном положениях системы и не зависит от формы траектории точек этой системы.
Из формулы (14-65) следует, что работа сил в потенциальном поле на всяком замкнутом перемещении, когда конечные перемещения равны нулю, тоже равна нулю.
Потенциальная энергия системы в любом данном ее положении равна сумме работ сил потенциального поля, приложенных к ее точкам на перемещении системы из данного положения в нулевое.
Потенциальную энергию можно представить в виде функции
П=П(x1,y1, z1, x2,y2, z2,… xn,yn, zn). (14-66)
В нулевом положении потенциальная энергия равна нулю.
Пусть механическая система перемещается из 1-го положения во второе.
Из определения потенциальной энергии следует, что работа сил поля, приложенных к точкам системы, на ее перемещении равна потенциальной энергии системы в 1-м положении П1. Аналогично работа сил поля на перемещение системы из 2-го положения в нулевое равна потенциальной энергии системы во 2-м положении П2. Отсюда следует:
A1,2= П1- П2. (14-67)
В поле сил тяжести потенциальная энергия тела равна П=mgH.
Т.о., работа сил, приложенных к точкам механической системы , на любом ее перемещении равна разности значений потенциальной энергии в начальном и конечном положениях системы.
Потенциальная энергия системы П отличается от силовой функции U, взятой со знаком минус, на постоянную величину U0:
При движении в потенциальном поле лишь одной МТ силовая функция имеет вид
U= U(x,y,z), (14-70)
Потенциальная энергия точки
П= П(x,y,z). (14-71)
В этом случае формулы (14-69), учитывающие проекции на оси координат силы поля, примут вид
X=-¶П/¶x; Y= -¶П/¶y; Z=- ¶П/¶z. (14-72)
Если же применить понятие вектора- градиента от скалярной функции U, то
grad U= i¶U/¶x+j¶U/¶y+k¶U/¶z, (14-73)
где i, j, k - единичные векторы, направленные по осям координат, то силу Р можно выразить как градиент силовой функции
Р= -grad U.
Очевидно, что
Р= -grad П.
Из равенства (14-72) следует
¶X/¶y=-¶ 2П/(¶xdy) ; ¶Y/¶x=-¶ 2П/(¶ydx);
¶Y/¶z=-¶ 2П/(¶ydz); ¶Z/¶y=-¶ 2П/(¶zdy); (14-74)
¶Z/¶x=-¶ 2П/(¶zdx); ¶X/¶z=-¶ 2П/(¶xdz).
Вследствие независимости смешанной производной от порядка дифференцирования имеем
¶X/¶y= ¶Y/¶x; ¶Y/¶z=¶Z/¶y; ¶Z/¶x=-¶X/¶z). (14-75)
Эти соотношения устанавливают условия, при которых силовое поле является потенциальным.
14.14. Закон сохранения механической энергии.
При движении механической системы под действием сил, имеющих потенциал, изменения кинетической энергии системы определяются зависимостями (14-65) и (14-67):
Т2- Т1= SАi= П1 – П2.
Откуда
Т1+ П1 = Т2+ П2,
Т.е.
Т+ П =const. (14-76)
Сумму кинетической и потенциальной энергий системы называют полной механической энергией системы.
Т.о., при движении механической системы в стационарном потенциальном поле полная механическая энергия системы остается неизменной.
В реальных условиях на механическую систему могут действовать не только потенциальные силы, и полная механическая энергия тогда может изменяться. Это происходит, когда часть энергии расходуется на преодоление различных сопротивлений или наблюдается приток энергии от других систем.
Расход механической энергии обычно означает превращение ее в теплоту, электричество, звук или свет, а приток связан с обратным процессом превращения различных видов энергии в механическую.

 Пример 14.3 Однородный стержень BD длиной l= 0,8 м опирается на гладкую стену и гладкий пол. a= 60°. (рис.14.15)Стержень падает, оставаясь в одной и той же плоскости.
Пример 14.3 Однородный стержень BD длиной l= 0,8 м опирается на гладкую стену и гладкий пол. a= 60°. (рис.14.15)Стержень падает, оставаясь в одной и той же плоскости. =U2- U1, (14-65)
=U2- U1, (14-65)