Регулирование частоты вращения асинхронного двигателя
Синхронная угловая частота вращения асинхронного двигателя зависит от частоты питающего напряжения и от числа пар полюсов статора р (5.31) или синхронная частота вращения
(5.45)
Вследствие этого изменением числа пар полюсов можно регулировать частоту вращения двигателя. У двигателей с переключением числа полюсов обмотка каждой фазы состоит обычно из двух одинаковых частей, в одной из которых изменяется направление тока путем переключения этих частей с последовательного на параллельное соединение [12].
Такое переключение (рис.5.16) приводит к уменьшению числа
полюсов вдвое и, следовательно, к увеличению вдвое синхронной частоты вращения машины. Присоединение обмоток производят переключением обмотки статора по схеме, приведенной на рис.5.17, а, где осуществлен
двигателя: а - со «звезды» на двойную «звезду»; б – с «треугольника»
на двойную «звезду».
Переключение обмотки статора со «звезды» на двойную «звезду» (рис.5.17, а) приводит увеличению частоты вращения вдвое, которое целесообразно производить при постоянном моменте. Последнее легко может быть доказано следующим путем.
При соединении обмоток в одинарную «звезду» мощность,
потребляемая двигателем, равна
(5.46)
где U - линейное напряжение, В; - номинальный ток, А.
а для двойной «звезды»
Если предположить, что coscos и не учитывать потери в двигателе, то развиваемая им мощность при вдвое большей частоте вращения будет в 2 раза больше мощности двигателя при низкой частоте вращения. Если с увеличением частоты вращения двигателя пропорционально растет мощность, то момент двигателя остается неизменным. (5.47)
Механические характеристики двухскоростного двигателя, частота вращения которого регулируется при постоянном моменте, приведены на рис.5.18.
Рис. 5.18. Механические характеристики двухскоростного
асинхронного двигателя, регулируемого с постоянным моментом.
Следует отметить, что при регулировании частоты вращения вниз от к двигатель, как это показано пунктиром, переходит в
генераторный режим с отдачей энергии в сеть.
Для соединения обмотки в «треугольник» (рис. 5.17, б) потребляемая двигателем мощность
(5.48 )
а при соединении в двойную «звезду»
(5.49 )
Сравнение двух последних выражений показывает, что при переключении на высшую частоту вращения мощность, развиваемая двигателем, изменяется незначительно (примерно на 15%, если принять, что coscos). В этом случае целесообразно использовать такой двигатель для механизмов, частота вращения которых
регулируется при постоянной мощности. Механические характеристики, иллюстрирующие возможность регулирования скорости вращения двухскоростного двигателя при постоянной мощности, показаны на рис.5.19.
Рис. 5.19.Механические характеристики двухскоростного
асинхронного двигателя, регулируемого с постоянной мощностью.
Кроме двухскоростных двигателей, применяются трехскоростные двигатели, имеющие, дополнительно еще одну непереключаемую обмотку,а также четырехскоростные двигатели, в статоре которых обычно закладываются две независимые обмотки на разные числа полюсов, каждая из которых переключается по одной из указанных
выше схем. Чтобы не производить переключений в обмотке ротора, двигатели с переключением полюсов выполняют с короткозамкнутым ротором, так как в нем распределение намагничивающей силы всегда
соответствует числу полюсов статорной обмотки.
Регулирование частоты вращения, достигаемое переключением полюсов, дает определенный ряд частот вращения, обусловленный частотой тока в сети и числом полюсов. Например, для практически применяемых четырехскоростных двигателей можно получить такие синхронные частоты вращения (3000/1500/1000/500; 3000/1500/750/375; 1 500/1000/750/500; 1 000/750/500/375. Из изложенного следует, что диапазон регулирования достигает
(6 : 1)…(8 : 1). Увеличивать этот диапазон практически нецелесообразно, так как уменьшение синхронной частоты вращения ниже
n = 375 приводит к значительному увеличению габаритов
двигателя. Регулирование частоты вращения переключением полюсов происходит ступенчато. Вместе с тем рассматриваемый способ регулирования является весьма экономичным, так как в процессе изменения скорости отсутствукт выделение дополнительных потерь в роторной цепи, вызывающее издишний нагрев двигателя и ухудшение его КПД. Механические характеристики многоскоростных АД имеют хорошую жесткость и достаточную перегрузочную способность. Благодаря своим преимуществам двигатели с переключением полюсов находят широкое применение там, где не требуется плавного регулирования частоты, например в некоторых металлорежущих станках в целях уменьшения количества механических передач. Их применяют также для вентиляторов, насосов и для привода других механизмов и машин в различных областях хозяйственной

 питающего напряжения и от числа пар полюсов статора р (5.31) или синхронная частота вращения
питающего напряжения и от числа пар полюсов статора р (5.31) или синхронная частота вращения (5.45)
(5.45)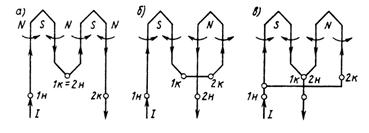
 (5.46)
(5.46) - номинальный ток, А.
- номинальный ток, А. cos
cos и не учитывать потери в двигателе, то развиваемая им мощность при вдвое большей частоте вращения будет в 2 раза больше мощности двигателя при низкой частоте вращения. Если с увеличением частоты вращения двигателя пропорционально растет мощность, то момент двигателя остается неизменным.
и не учитывать потери в двигателе, то развиваемая им мощность при вдвое большей частоте вращения будет в 2 раза больше мощности двигателя при низкой частоте вращения. Если с увеличением частоты вращения двигателя пропорционально растет мощность, то момент двигателя остается неизменным. 
 (5.47)
(5.47)
 к
к  двигатель, как это показано пунктиром, переходит в
двигатель, как это показано пунктиром, переходит в (5.48 )
(5.48 ) (5.49 )
(5.49 ) cos
cos
 3000/1500/1000/500; 3000/1500/750/375; 1 500/1000/750/500; 1 000/750/500/375.
3000/1500/1000/500; 3000/1500/750/375; 1 500/1000/750/500; 1 000/750/500/375.  приводит к значительному увеличению габаритов
приводит к значительному увеличению габаритов