ДПТ ПВ может работать в двух тоpмозных режимах: противовключения и динанамического тоpможения.
В режиме противовключения ДПТПВ напряжение сети и ЭДС совпадают по знаку. Для ограничения значения тока в цепь якоря вводится добавочный резистор. Механические характеристики для этого режима располагаются во втором и четвертом квадрантах.
Режим противовключения возможен в двух случаях:
1.При работе двигателя с активным моментом сопротивления, например, движение лебедки, поднимающей груз. Здесь – момент сопротивления, создаваемый грузом (рис.3.8).
Рис. 3.8. Характеристика режима противовключения ДПТ ПВ при включении добавочного резистора в цепь якоря.
Подъем груза идет со скоростью ω1 (точка 1). Включаем в цепь якоря добавочное сопротивление Rдобl , двигатель переходит на искусствeннyю механическую характеристику (точка 2). Под действием груза происходят тоpможение двигателя до ω3 = 0. В точке 3 , поэтомy под действием груза двигатель начинает вращаться в обратнyю сторону, против включения, и в точке 4. Двигатель будет работать с постоянной угловой скоростью ω4 в режиме противовключения, опуская груз.
Рис.3.9. Реверсирование двигателя ДПТ ПВ.
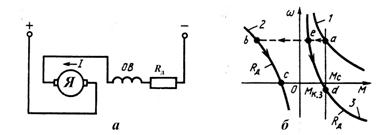
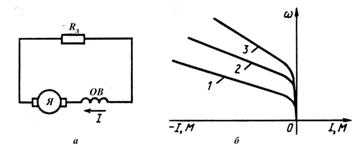
2.При реверсе двигателя, который осуществляют изменением полярности подведенного к якорю напряжения (рис.3.9). Направление тока в обмотке возбуждения не меняют, с тем чтобы не перемагнитить систему (рис. 3.10 ).
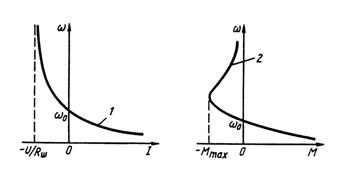
Механические характеристики для этого случая изображены на pис. 3.10.
Рис.3.10. Механические характеристики ДПТ ПВ
при реверсе в режиме противовключения..
При переключении обмоток якоря под действием сил инерции угловая скорость в первый момент не изменится. Не меняются направление тока в обмотке возбуждения и знак потока возбуждения. Ток якоря меняет свое направление, поэтому момент двигателя становится отрицательным и характеристика располагается во втором квадранте. Этот момент тормозной, так как момент и угловая скорость имеют разные знаки. При реверсе ЭДС двигателя и напряжение сети совпадают по знаку, поэтому для ограничения тока в цепь якоря включают добавочный резистор, и характеристика получается пологой. В режим противовключения характеристика двигателя располагается
между точками б и с. Уравнение ЭДС для режима противовключения:
(3.17) Умножим на ток I левую и правую части: (3.18) Из этого выражения следует, что энергия, подводимая из сети и с вала двигателя, полностью теряется в резисторах и . Динамическое торможение ДПТ ПВ можно осуществить двумя способами: с независимым возбуждением и с самовозбуждением. Торможение с независимым возбуждением получают следующим образом: обмотку якоря замыкают на добавочный резистор, а обмотку возбуждения включают в сеть. В этом случае имеем рассмотренное ранее динамическое торможение двигателя независимого (параллельного) возбуждения. Схема и механические характеристики для этого случая приведены на рис.3.11.
а б
Рис.3.11. Механические характеристики ДПТ ПВ в режиме
динамического торможения с независимым возбуждением: а - схема;
б – механические характеристики.
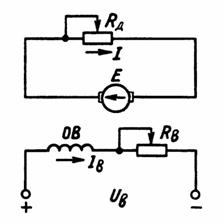
В режиме динамического торможения с самовозбуждением якорь включают последовательно с обмоткой возбуждения через добавочный резистор. Чтобы не размагничивать систему при данном способе торможения, переключают якорь и оставляют прежним направление тока в обмотке возбуждения (рис.3.12).
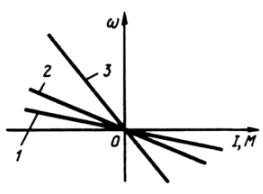
Остаточный магнитный поток машины в обмотке якоря наводит ЭДС. После переключения якоря направление тока обмотки возбуждения остается прежним, и остаточный поток сyммиpуется с потоком, созданным током возбуждения. Значение наведенной ЭДС возрастает, одновременно растет и ток. Для его ограничения необходимо добавочное сопротивление Rдоб, Знак создаваемого момента будет отрицательным из-за смены направления тока в якоре, следовательно, для рассматриваемого направления вращения имеем тоpмозной режим. Механическая характеристика в режиме динамического торможения будет нелинейной, как и для двигательного режима (рис.3.13)
Рис.3.13. Механические характеристики ДПТ ПВ в режиме
динамического торможения с самовозбуждением.
Как показывает Москаленко, В.В. [12], особые свойства приобретает электродвигатель последовательного возбуждения при шунтировании обмотки якоря резистором (рис.3.14). Ток в обмотке
возбуждения
,
где- ток якоря, А; ток в шунтирующем резисторе, А.
Рис.3.14. Схема включения ДПТ ПВ при шунтировании якоря
добавочным резистором.
В целях упрощения рассуждений можно принять, что в электродвигателе действует два магнитных потока: поток , созданный током якоря, зависящий от нагрузки электродвигателя, и поток ,созданный током , не зависящий от нагрузки электродвигателя. Наличие магнитного потока делает возможным в электродвигателе последовательного возбуждения режим холостого хода. Значение частоты вращения идеального х.х. в таком электродвигателе тем меньше, чем меньше значение сопротивления резистора. Электродвигатель последовательного возбуждения с шунтирующим резистором может работать в режиме генераторного торможения с отдачей энергии в сеть постоянного тока. Характеристики для этого режима работы представлены на рис. 3.16.
а б
Рис.3.15. Электромеханическая – а и механическая - б характери стики ДПТ ПВ при шунтировании якоря добавочным резистором.

 – момент сопротивления, создаваемый грузом (рис.3.8).
– момент сопротивления, создаваемый грузом (рис.3.8).
 , поэтомy под действием груза двигатель начинает вращаться в обратнyю сторону, против включения, и в точке 4
, поэтомy под действием груза двигатель начинает вращаться в обратнyю сторону, против включения, и в точке 4 . Двигатель будет работать с постоянной угловой скоростью ω4 в режиме противовключения, опуская груз.
. Двигатель будет работать с постоянной угловой скоростью ω4 в режиме противовключения, опуская груз.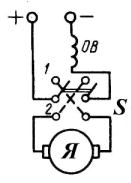
 (3.17)
(3.17)  (3.18)
(3.18) и
и  .
.
 (рис.3.14). Ток в обмотке
(рис.3.14). Ток в обмотке ,
, - ток якоря, А;
- ток якоря, А;  ток в шунтирующем резисторе, А.
ток в шунтирующем резисторе, А. 
 , созданный током якоря, зависящий от нагрузки электродвигателя, и поток
, созданный током якоря, зависящий от нагрузки электродвигателя, и поток  ,созданный током
,созданный током  , не зависящий от нагрузки электродвигателя.
, не зависящий от нагрузки электродвигателя. в таком электродвигателе тем меньше, чем меньше значение сопротивления резистора
в таком электродвигателе тем меньше, чем меньше значение сопротивления резистора .
.