Механические и электромеханические характеристики становятся искусственными, если UДВUН или ФДВ = ФН или Rдоб > 0. Изменение значения напряжения или потока возбуждения машины, увеличение добавочного сопротивления в цепи якоря могут возникнуть при пуске, а также при регулировании частоты вращения двигателя. Изменение U, Ф или Rдоб может быть обусловлено и отдаленностью источника питания от электрического двигателя. При больших токах нагрузки в этом случае возникает значительное падение напряжения в сети, что приводит к снижению напряжения на якоре и потока возбуждения машины. Рассмотрим характеристики двигателя постоянного тока при изменении напряжения, потока и добавочного сопротивления. Грачев Г.М. [4] рекомендует рассматривать при этом три случая.
Первый случай. U = UH , Ф = Rдоб > 0 частота вращения идеального холостого хода двигателя параллельного (или независимого) возбуждения при введении в цепь якоря добавочного сопротивления остается неизменной:
При введении в цепь якоря добавочного сопротивления снижается. пусковой ток, следовательно, и пусковой момент двигателя
IП = UН/(rя + Rдоб); МП = UН сФ/(rя + Rдоб).
Графики механической характеристики приведены на рис.2.3. Из графиков видно, чем больше значение добавочного сопротивления, тем мягче характеристики. С ростом RДОБ растет падение напряжения на сопротивлениях (rДВ + RДОБ). следовательно, на якорь двигателя приходится меньшее значение напряжения. С уменьшением напряжения на якоре (при постоянстве потока) снижается частота вращения двигателя.
Второй случай. Ф = ФН0М, RДОБ = 0, U < UH
В электрических машинах постоянного тока напряжение на якоре можно изменять в пределах (т.е. только в сторону понижения от номинального значения).
Рис. 2.3. Характеристики двигателя постоянного тока параллельного возбуждения при изменении сопротивления в цепи якоря:
а - электромеханические ; б – механические.
При уменьшении напряжения на якоре уравнения искусственных характеристик имеют вид:
, (2.16 )
(2.17 )
Таким образом, значения жесткости механической и электромеханической характеристик не изменяются. Это значит, что искусственные характеристики располагаются параллельно естественным.
Координата первой точки
, М = 0 , I = 0.
С уменьшением напряжения на якоре пропорционально изменяется и значение частоты вращения идеального холостого хода:
а б
Рис.2.4. Характеристики двигателя постоянного тока параллельного возбуждения при изменении напряжения на якоре:
а – электромеханические; б - механические.
Координаты второй точки МПИ, IПИ также изменяются пропорционально приложенному к якорю напряжению. Характеристики для UH < U1 < U2 < U3 и т.д. изображены на рис.2.4.
Из графика рис.2.4 и уравнения (2.17 ) видно, что при одном и том же моменте двигателя при уменьшении напряжения частота вращения двигателя уменьшается с до и т.д.
Третий случай U = UH , RДОБ = 0, Ф < ФН
Рабочая точка на кривой намагничивания двигателя выбирается на перегибе, поэтому поток Ф можно только понижать. Следует рассматривать условие, когда Ф < ФН
Значение частоты вращения идеального хода растет:
Пусковой ток остается постоянным, а момент снижается:
I = ; М = с Ф U/.
Уравнения электромеханической и механической характеристик:
; (2.18)
(2.19)
Таким образом, при ослаблении потока двигателя до какого-то значения частота вращения возрастает. Действительно, при ослаблении потока возбуждения до Ф1 < ФН уменьшается ЭДС якоря и возрастает ток:
I1 = (UH - cФ1е)/rЯ (2.20)
Возрастает и момент двигателя. При ослаблении потока на частоте вращения момент двигателя М2 больше МС и двигатель начинает разгоняться до частоты вращения, где МС будет равен моменту двигателя. Следует отметить, что значение тока I3 на частоте вращения больше, чем на , т.к. МС = const.
График изменения тока и момента в зависимости от частоты вращения при ФН > Ф1 > Ф2 и т.д. приведен на рис.2.5.
а б
Рис.2.5. Характеристики двигателя постоянного тока параллельного возбуждения при изменении магнитного потока возбуждения:

 UН или ФДВ = ФН или Rдоб > 0. Изменение значения напряжения или потока возбуждения машины, увеличение добавочного сопротивления в цепи якоря могут возникнуть при пуске, а также при регулировании частоты вращения двигателя. Изменение U, Ф или Rдоб может быть обусловлено и отдаленностью источника питания от электрического двигателя. При больших токах нагрузки в этом случае возникает значительное падение напряжения в сети, что приводит к снижению напряжения на якоре и потока возбуждения машины. Рассмотрим характеристики двигателя постоянного тока при изменении напряжения, потока и добавочного сопротивления. Грачев Г.М. [4] рекомендует рассматривать при этом три случая.
UН или ФДВ = ФН или Rдоб > 0. Изменение значения напряжения или потока возбуждения машины, увеличение добавочного сопротивления в цепи якоря могут возникнуть при пуске, а также при регулировании частоты вращения двигателя. Изменение U, Ф или Rдоб может быть обусловлено и отдаленностью источника питания от электрического двигателя. При больших токах нагрузки в этом случае возникает значительное падение напряжения в сети, что приводит к снижению напряжения на якоре и потока возбуждения машины. Рассмотрим характеристики двигателя постоянного тока при изменении напряжения, потока и добавочного сопротивления. Грачев Г.М. [4] рекомендует рассматривать при этом три случая. Rдоб > 0 частота вращения идеального холостого хода двигателя параллельного (или независимого) возбуждения при введении в цепь якоря добавочного сопротивления остается неизменной:
Rдоб > 0 частота вращения идеального холостого хода двигателя параллельного (или независимого) возбуждения при введении в цепь якоря добавочного сопротивления остается неизменной:
 (т.е. только в сторону понижения от номинального значения).
(т.е. только в сторону понижения от номинального значения).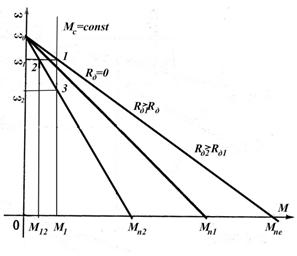
 , (2.16 )
, (2.16 ) (2.17 )
(2.17 ) , М = 0 , I = 0.
, М = 0 , I = 0.
 до
до  и т.д.
и т.д.
 I =
I =  ; М = с Ф U/
; М = с Ф U/ ; (2.18)
; (2.18) (2.19)
(2.19) е)/rЯ (2.20)
е)/rЯ (2.20) момент двигателя М2 больше МС и двигатель начинает разгоняться до частоты вращения
момент двигателя М2 больше МС и двигатель начинает разгоняться до частоты вращения , где МС будет равен моменту двигателя. Следует отметить, что значение тока I3 на частоте вращения
, где МС будет равен моменту двигателя. Следует отметить, что значение тока I3 на частоте вращения  больше, чем на
больше, чем на 

