Наземная стереофотограмметрическая съемка – это составление плана путем обработки снимков местности, полученных фотографированием ее камерами, установленными на земной поверхности. Такую съемку особенно часто применяют при съемке горной местности.
Фотографирование местности выполняют фототеодолитами, а в настоящее время чаще цифровыми фотокамерами.
Фототеодолит – прибор, представляющий собой фотокамеру с ориентирующим устройством, служащим для ориентирования фотокамеры в нужном направлении. На рис. 13.1 показан фототеодолит Р30 фирмы Вильд (ФРГ), в верхней части которого укреплен теодолит, который используется как для ориентирования фотокамеры, так и для выполнения необходимых угловых измерений.
Участок местности фотографируют из двух точек S1 и S2 (рис. 13.2). Расстояние между ними называется базисом фотографирования.
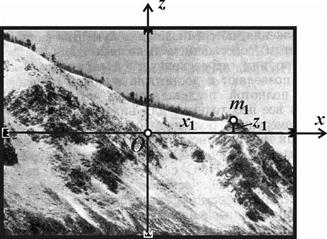
В результате фотографирования местности на стеклянной фотопластинке, помещенной в кассету фотокамеры, фиксируется снимок - изображение местности и координатные метки (рис. 13.3).
Рис. 13.2 Схема фотографирования местности
Рис. 13.1 Фототеодолит P30
Рис. 13.3 Фотоснимок (левый)
На снимке измеряют координаты изображений точек местности и их продольные параллаксы. Координатными осями снимка служат оси x и z, проходящие через координатные метки. На рис. 13.3 показан снимок и на нем - координаты x1 и z1 изображения m1 точки местности M (см. рис. 13.2).
При изготовлении и юстировке фототеодолита стремятся, чтобы пересечение O осей x и z совпадало с главной точкой снимка, то есть с точкой пересечения плоскости снимка главным лучом - проектирующим лучом, перпендикулярным к плоскости снимка.
Нормальным случаем съёмки считают такой, когда при фотографировании главный луч фотокамеры S1O1 (рис. 13.4) устанавливают в горизонтальное положение и в обеих точках (S1 и S2) направляют перпендикулярно базису. Но часто съемку выполняют с отклонением главных лучей от нормали к базису на одинаковые или даже разные углы.
По результатам измерений вычисляют пространственные координаты точек местности, выраженные в фотограмметрической системе координат S1XYZ (см. рис. 13.4).
а)
б)
Рис. 13.4 Связь координат x, z на снимках
с фотограмметрическими координатами X, Y, Z:
а – проекция на горизонтальную плоскость S1XY;
б – проекция на вертикальную плоскость S1YZ
Началом фотограмметрических координат служит центр проекции левого снимка S1. Оси X и Y лежат в горизонтальной плоскости. За ось Y принято направление главного луча фотокамеры O1S1, а ось X перпендикулярна к нему и при нормальном случае съемки лежит в одной отвесной плоскости с базисом. Ось Z направлена вверх по отвесной линии. Точки О1 и О2 – главные точки левого и правого снимков. Точка местности М изобразится на левом снимке в точке m1, а на правом – в точке m2. Для вычисления фотограмметрических координат точки M используют следующие очевидные соотношения:
, (13.1)
где X, Y, Z – фотограмметрические координаты точки M;
p – продольный параллакс (p = x2 – x1);
f – фокусное расстояние камеры;
B – горизонтальное проложение базиса, который измеряют с относительной погрешностью, не превышающей 1:2000.
Из соотношений (13.1) вытекают формулы для вычисления фотограмметрических координат:
.
При съемке значительных участков местности фотографирование разных ее частей приходится выполнять с разных базисов, получая координаты точек местности в разных фотограмметрических системах.
От фотограмметрических координат X, Y, Z переходят к геодезическим прямоугольным координатам, например, координатам Гаусса–Крюгера x, y и нормальным высотам H. При нормальном случае съемки этот переход выполняют, используя формулы:
,
,
,
где , , , – геодезические прямоугольные координаты пикета M и центра проектирования S1;
и – высоты тех же точек;
a - дирекционный угол оси Y, то есть направления главного луча фотокамеры O1S1.
Координаты и высоту центра проектирования, а также дирекционный угол направления O1S1 определяют привязкой к опорной геодезической сети.
Вычислив координаты и высоты достаточного числа пикетов, располагаемых в характерных точках контуров и рельефа, и нанеся их на план, вычерчивают очертания контуров и горизонтали. Вычисления и графические построения автоматизированы и выполняются по стандартным программам на цифровой фотограмметрической станции ЦФС, включающей компьютер, дисплей, устройства ввода и вывода информации, в том числе графопостроитель. Снимки местности вводятся в ЦФС в цифровом виде. Для этого, если изображение местности получено на фотопластинке или фотобумаге, его сканируют и преобразуют в цифровую форму. При фотографировании цифровыми камерами сразу получают цифровые снимки. В результате последующей обработки снимков формируется цифровая модель местности и при необходимости на графопостроителе вычерчивается план местности.
Отметим, что наземная стереофотограмметрическая съемка применяется не только для составления планов местности. Фотографируя фасады зданий, архитектурные и исторические памятники, создают чертежи, подробно отражающие детали их формы, позволяющие выполнять точные их обмеры и создавать документы, используемые в последующем, например, при реставрационных работах.
13.2 Сканерная съемка
Лазерный сканер – прибор, предназначенный для автоматического определения пространственных координат множества точек, расположенных на поверхности объекта съемки.
Сканер излучает лазерный луч, который, отразившись от поверхности объекта, возвращается к прибору. По времени прохождения сигнала, как и в светодальномере, определяется расстояние до точки отражения.
Шаговый двигатель прибора системой зеркал изменяет направление лазерного луча. По углам поворота зеркал и измеренному расстоянию вычисляются трехмерные координаты точки.
Интерфейсным кабелем сканер соединен с компьютером, который по установленной программе управляет работой сканера и обрабатывает результаты измерений.
При выполнении съемки поверхность объекта покрывается "облаком точек", то есть множеством точек, плотность которых может задаваться в пределах от долей миллиметра до нескольких сантиметров. В результате обработки измерений получают трехмерную модель объекта. Эту модель можно рассматривать на экране компьютера под разными углами зрения и в разных проекциях, а также выполнять на ней обмер интересующих частей объекта съемки.
Ограниченное поле зрения сканера и форма объекта съемки обычно не позволяют выполнить съемку всего объекта с одной установки сканера. Поэтому сканирование выполняют из нескольких позиций сканера, покрывая объект "облаком точек" по частям. При этом части облака должны иметь перекрытия, то есть общие точки, что дает возможность "сшивать" эти части в одно целое. Такими общими точками служат характерные, особенно четкие точки объекта или специальные мишени, устанавливаемые перед съемкой на объекте. При необходимости центры мишеней геодезическими измерениями привязывают к существующей геодезической сети. Такой привязкой обеспечивается представление всей модели в единой с геодезической сетью системе координат.
Рис. 13.5 Лазерный сканер Leica HDS2500
Сканеры существуют разной точности (рис. 13.5). Выбор сканера зависит от характера решаемой задачи. Так, точные сканеры при расстоянии от прибора до объекта 50 м обеспечивают определение положения точек с погрешностями, не превышающими 3–6 мм. Сканеры с дальностью съемки 400 м и более характеризуются точностью в несколько сантиметров.
Метод лазерного сканирования применяется для оперативного составления плана участка местности, а также для съемки искусственного сооружения или фасада здания и получения их точных чертежей.


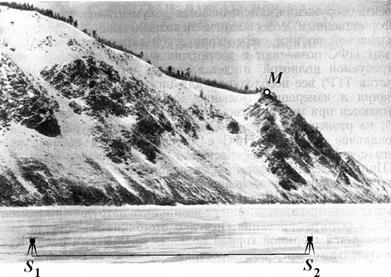 Рис. 13.2 Схема фотографирования местности
Рис. 13.2 Схема фотографирования местности


 , (13.1)
, (13.1)

 .
. ,
, ,
, ,
, ,
,  ,
,  ,
,  – геодезические прямоугольные координаты пикета M и центра проектирования S1;
– геодезические прямоугольные координаты пикета M и центра проектирования S1; и
и  – высоты тех же точек;
– высоты тех же точек;