Съемка больших территорий в настоящее время осуществляется методами фотограмметрии, изучающей способы и технологию определения форм, размеров, положения в пространстве, количественные и качественные характеристики объектов по их изображениям.
Изображения местности получают с помощью специальной аппаратуры, устанавливаемой на авиационных или космических носителях. Для аэросъемки используют самолеты (например, АН-30, ТУ-134, ИЛ-18), сверхлегкие летательные аппараты (малые самолеты, мотодельтапланы) и вертолеты. Космическая съемка выполняется с искусственных спутников Земли, пилотируемых космических кораблей и орбитальных станций.
Среди аэрокосмических различают съемки фотографические, сканерные, тепловые инфракрасные, радиолокационные и др.
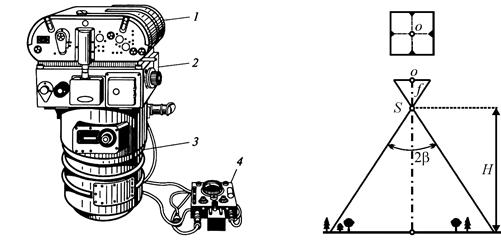
Основным видом аэрокосмической съемки является аэрофотосъемка, которую выполняют с помощью аэрофотоаппаратов (рис. 12.1, а). Аэрофотоаппаратом изображение местности фиксируется на фотопленке - черно-белой, цветной или спектрозональной. Наиболее распространены форматы снимков: в нашей стране - 18×18 см и 30×30 см, за рубежом -18×18 см и 23×23 см.
В аэрофотоаппаратах применяют сфокусированные на бесконечность линзовые объективы с фокусным расстоянием от 35 до 1000 мм (наиболее часто используются объективы с фокусным расстоянием 70, 100, 200 мм). Формат кадра и фокусное расстояние определяют угол поля зрения аэрофотоаппарата 2b (рис. 12.1, б). У узкоугольных аэрофотоаппаратов 2b < 50°, у широкоугольных - достигает 140°.
Возможность раздельно различать на снимке мелкие близко расположенные детали изображения называется разрешающей способностью снимка. В настоящее время аэрофотоснимки имеют разрешающую способность 10-40 линий на миллиметр.
При фотографировании на аэроснимке фиксируется изображение местности, а также координатные метки, которые определяют плоскую систему координат снимка (см. рис. 12.1, б).
а) б)
Рис. 12.1 Аэрофотоаппарат:
а – устройство: 1 – кассета; 2 – камерная часть; 3 – часть объектива;
4 – командный прибор; б – схема фотосъемки: S – центр проектирования снимка;
f – фокусное расстояние; H – высота фотографирования
Аэрофотоснимок, угол наклона которого при фотографировании был равен нулю, называется горизонтальным, при угле наклона, не превышающем 3°, - плановым, при угле наклона более 3° - перспективным.
Различают аэрофотосъемку одинарную - это съемка отдельных объектов, маршрутную - фотографирование полосы местности вдоль заданной линии (например, железной дороги) и площадную - фотографирование местности несколькими параллельными маршрутами. Фотографирование выполняют так, чтобы смежные снимки одного маршрута имели продольное перекрытие не менее 60%, а снимки соседних маршрутов – поперечное перекрытие не менее 30%.
Аэрофотоснимок представляет собой центральную проекцию точек местности на плоскость снимка (см. рис. 12.1, б). Масштаб горизонтального снимка определяется по формуле
, (12.1)
где М – знаменатель масштаба, Н - высота полёта и f - фокусное расстояние аэрофотоаппарата.
Для выполнения космических съемок используют космические фотоаппараты, являющиеся длиннофокусными модификациями аэрофотоаппаратов.
Наряду с аэрофотоаппаратами при аэросъемке стали применять цифровые электронные камеры, сканеры и другие съемочные системы, создающие цифровые изображения местности.
Цифровая электронная камера снабжена ПЗС-приемником (прибором с зарядовой связью). ПЗС-приемник представляет собой многоэлементный фотоэлектрический приемник излучения, состоящий из миниатюрных фотодиодов, соединенных в линейку или двумерную матрицу. Размер отдельного чувствительного элемента - меньше 0,01 мм. Лучи света от разных участков местности попадают на разные фотодиоды, создавая в совокупности изображение местности.
Сканеры бывают оптико-механические и оптико-электронные. В оптико-механическом сканере сканирующее устройство – быстрокачающееся зеркало, которое, просматривая местность поперек движения носителя, посылает лучистый поток в объектив и далее на точечный фотоприемник.
В оптико-электронном сканере для регистрации излучения используется ПЗС-линейка, располагаемая перпендикулярно к направлению движения носителя аппаратуры. Периодически ПЗС-линейкой фиксируется строка изображения местности. Последовательное соединение строк формирует изображение полосы местности (рис. 12.2).
Разрешающую способность цифровых снимков принято характеризовать числом точек на дюйм - dpi (от англ. dots per inch) и размером пикселя на местности - PIX. В частности, размер пикселя в системе TM, установленной на ИСЗ Landsat, равен 30 м, а МСУ-Э/Ресурс-О – 45 м.
Рис. 12.2 Сканерная съемка
Сканерный метод позволяет выполнять съемки местности в течение длительного времени, передавая собираемую информацию по радиоканалам на Землю.
Лазерный сканер - сканирующий лазерный дальномер. Местность и расположенные на ней объекты отображаются множеством точек, для каждой из которых получают пространственные координаты и которые при визуализации на мониторе образуют объемное изображение объекта.
Съемка местности сопровождается определением координат аэросъёмочной аппаратуры с помощью спутникового приемника GPS/ГЛОНАСС, а также измерением высоты съемки радиовысотомером.
12.2 Дешифрирование снимков
Полученные при аэрокосмической съемке снимки надо дешифрировать, то есть опознать изображенные на них объекты и определить их количественные и качественные характеристики.
Дешифрирование различают топографическое и тематическое. Цель топографического дешифрирования - получение информации о местности, необходимой для составления топографических карт и планов, тематического – получение специальной информации (например, экологической).
Дешифрирование снимков бывает камеральное и полевое.
Камеральное дешифрирование выполняется в стационарных условиях путем анализа изображений на снимках и сопоставления их с имеющимися эталонами. При этом используют прямые и косвенные дешифровочные признаки. Первые описывают изображение самого объекта (форму, размер, тон, цвет и др.), вторые дают информацию о не изобразившемся на снимке объекте (или не дешифрируемом по прямым признакам) на основе анализа его взаимосвязей с другими объектами.
Часто невозможно по снимку получить достаточные характеристики объектов, например, количество проводов на столбах линии связи, скорость течения реки, отличить луг от болота и др. Тогда камеральное дешифрирование дополняется более дорогим – полевым дешифрированием. При полевом дешифрировании специалист, обходя местность, непосредственно сравнивает изображения на снимке с объектами и устанавливает их характеристики.
12.3 Искажения снимков
Изображение местности на снимке имеет искажения, основные из которых обусловлены непостоянством высоты фотографирования, рельефом местности, наклоном снимка, кривизной земной поверхности.
Изменение высоты фотографирования вызывает изменение масштаба аэроснимков (см. (12.1)).
в)
б)
а)
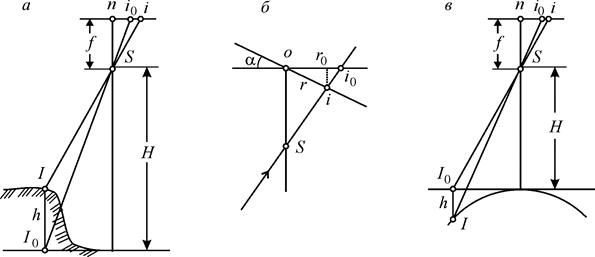
Рис. 12.3 Смещения точек на снимке, вызванные:
а - рельефом; б - наклоном снимка; в - кривизной уровенной поверхности Земли
Рельеф местности вызывает смещения i0i = dh (рис. 12.3, а) изображений точек на снимке, выражаемые формулой
,
где r – расстояние до точки надира n (пересечения снимка отвесной линией, проходящей через центр проекции);
h – превышение точки I над точкой ;
H – высота фотографирования.
На космических снимках эти искажения незначительны и учитывают их только в высокогорных районах.
Наклон снимка на угол a вызывает смещения точек относительно соответствующих точек горизонтального снимка. Изменение расстояния от центра снимка до точки в направлении наклона равно
da = ra - r0,
где r0 – расстояние на горизонтальном снимке, а ra – на наклонном. Из рис. 12.3, б видно, что
.
Следовательно, изменение расстояния равно:
.
Влияние кривизны Земли на положение точек на снимке аналогично влиянию рельефа (рис. 12.3, в).
Искажения снимков, полученных сканером, кроме названных причин, вызваны еще тем, что изображение сканерного снимка по направлению полета и направлению сканирования строится в различных проекциях: в направлении полета – в ортогональной проекции, в перпендикулярном направлении – в перспективной проекции. В результате круг на плоской местности изображается на сканерном снимке неправильным овалом, прямая – кривой, квадрат - прямоугольником.
В результате искажений аэрокосмические снимки имеют разный масштаб, причем неодинаковый в разных частях снимка.
12.4 Трансформирование снимков
Трансформирование аэрофотоснимков – это преобразование плановых или перспективных снимков в горизонтальные снимки заданного масштаба.
Трансформирование различают фотомеханическое и компьютерное.
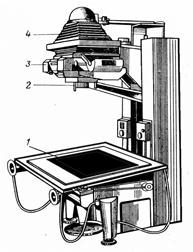
Фотомеханическое трансформирование выполняется на фототрансформаторах (рис. 12.4). Для трансформирования должны быть известны координаты четырех изображенных на снимке опорных точек. Планшет с нанесенными на него опорными точками помещают на экран 1, проецируют на него негатив снимка, заложенный в кассету 3 и, изменяя масштаб изображения и поворачивая экран и негатив, добиваются совмещения опорных точек на планшете с соответствующими точками проекции негатива. Полученное на экране трансформированное изображение фиксируют на фотобумаге.
4 32 1
Рис. 12.4 Фототрансформатор Seg-5 (ФРГ):
1 – экран; 2 – объектив; 3 – кассета;
4 – осветительное устройство
Однако при таком трансформировании не устраняются искажения, обусловленные рельефом местности, которые для горных районов весьма существенны. Такие искажения устраняют, трансформируя снимок по зонам, имеющим разную высоту, или с помощью щелевых трансформаторов.
Для компьютерного трансформирования аэрофотоснимок преобразуют в цифровую форму, после чего преобразования выполняют по стандартным компьютерным программам.
По компьютерным программам выполняется и трансформирование сканерных снимков.
12.5 Составление фотопланов и фотосхем
Фотоплан монтируют из трансформированных аэроснимков. Основой фотоплана служит бумага, наклеенная на лист алюминия или картона. На основу наносят координатную сетку и по их координатам - опорные точки. На трансформированных снимках опорные точки прокалывают пуансоном, после чего, совмещая отверстия на снимках с опорными точками на основе, середину снимков приклеивают к основе. Наклеив два соседних снимка, разрезают их по середине перекрытия и подклеивают края на стыке снимков. Покрыв снимками всю площадь, получают единое фотографическое изображение местности, соответствующее по точности топографическим планам того же масштаба. Обычно на фотоплан наносят координатную сетку и подписывают названия населенных пунктов, рек и других объектов.
Фотосхемумонтируют без использования опорных точек. Смежные снимки совмещают методом "мигания". На снимок, закрепленный на основе, накладывают смежный снимок и быстрыми отгибаниями его в зоне перекрытия совмещают контуры снимков. Закрепив середину смежного снимка, оба снимка разрезают по середине перекрытия. Продолжая, получают фотографическое изображение местности – фотосхему, менее точную, но требующую меньше времени для ее составления. Можно составлять фотосхемы и из нетрансформированных аэроснимков.
12.6 Составление по снимкам топографических планов
Планы местности по снимкам составляют, применяя стереофотограмметрический метод, заключающийся в совместной обработке пар перекрывающихся аэроснимков, полученных фотографированием местности из двух разных точек. Два снимка одного участка местности, полученные фотографированием из разных точек, называют стереопарой.
Если выполнить взаимное ориентирование двух смежных снимков, то есть установить их в то же взаимное положение, которое они занимали в момент съемки, то пересечения лучей, проведенных через центры проектирования от одноименных точек на снимках, образуют пространственную модель местности. Масштаб такой модели равен отношению расстояния между центрами снимков к расстоянию между центрами проектирования - базису фотографирования.
Выполнив внешнее ориентирование построенной модели, то есть повернув ее и изменив масштаб таким образом, чтобы координаты и высоты опорных точек модели стали равны известным из наземных геодезических измерений плановым координатам и высотам, выраженным в заданном масштабе, получают модель, по которой можно определять координаты и высоты всех других точек местности.
Взаимное и внешнее ориентирование снимков и последующие измерения на модели местности выполняют, используя стереофотограмметрические приборы.
Рассмотрим идеальную стереопару (рис. 12.5), в которой оба снимка и базис фотографирования B горизонтальны. Локальные плоские координаты ХC, YC любой точки C можно вычислить по измеренным координатам , ее изображения на снимке (например, левом):
; .
где H – высота фотографирования;
f – фокусное расстояние аэрофотоаппарата.
За начало локальных координат принята проекция O1 точки S1 на исходную уровенную поверхность.
Превышения между точками местности вычисляют по разностям их продольных параллаксов. Продольным параллаксом pc точки c называется разность абсцисс ее изображений на левом и правом снимках стереопары:
pc = .
Аналогично для точки A:
pa = .
Из рис. 12.5 видно, что
. (12.2)
Рис. 12.5 Идеальная стереопара
Аналогично для точки A:
. (12.3)
Вычитая (12.3) из (12.2), после преобразований получим:
,
где Dp = pa - pc - разность продольных параллаксов;
b = pc – базис фотографирования, выраженный в масштабе снимка.
Измерив разности продольных параллаксов Dp между изображениями характерных точек местности и опорных точек, высоты которых известны, вычисляют превышения, а затем и высоты определяемых характерных точек.
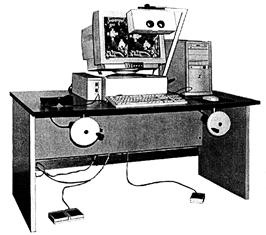
Обработку стереопар выполняют с помощью цифровых фотограмметрических станций (рис. 12.6), представляющих собой программно-аппаратные комплексы (компьютер, стереоочки, фотограмметрический сканер, программное обеспечение). В ходе обработки выполняется сканирование фотоснимков, их ввод в цифровой форме в память компьютера, взаимное и внешнее ориентирование, визуализация стереопар на экране дисплея. Оператор, наблюдая стереопару через стереоочки, наводит курсор на нужные точки, и компьютер вычисляет их координаты. Автоматически в интерактивном режиме выполняется отслеживание контуров и горизонталей. По результатам обработки стереопар создается план местности, изображение которого высвечивается на экране. Оператор редактирует его, вводя нужные условные знаки и исправляя неточности. Созданный план хранится в цифровом виде и может быть отпечатан на плоттере. Для обработки снимков служат такие программные продукты, как ERDAS Imagine, ENVI, PHOTOMOD, Талка и др.
Рис. 12.6 Цифровая фотограмметрическая станция ЦНИИГАиК

 , (12.1)
, (12.1)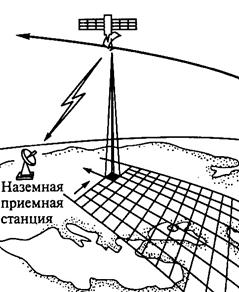
 ,
, ;
; .
. .
.
 ,
,  ее изображения на снимке (например, левом):
ее изображения на снимке (например, левом): ;
;  .
. .
.
 .
. . (12.2)
. (12.2)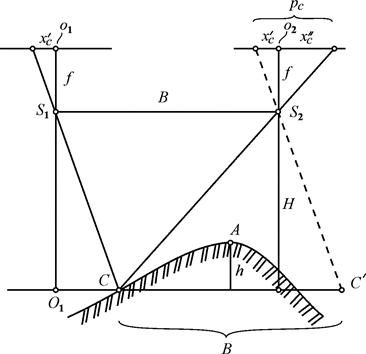
 . (12.3)
. (12.3) ,
,