10.1 Общие сведения о спутниковых навигационных системах
Спутниковые геодезические измерения выполняют с помощью аппаратуры, работающей по сигналам спутников навигационных систем GPS (Global Positioning System, США) и ГЛОНАСС (Глобальная навигационная спутниковая система, Россия). В Европейском союзе ведутся работы по созданию еще одной системы - GNSS-2 "GALILEO".
Краткие сведения об этих системах приведены в табл. 10.1.
Таблица 10.1
Основные характеристики спутниковых навигационных систем
Основные характеристики
ГЛОНАСС
GPS
GALILEO
Число ИСЗ (резерв)
24 (3)
24 (3)
27 (3)
Число орбитальных плоскостей
Число ИСЗ в орбитальной плоскости
Орбиты
Близкие к круговой
Высота орбит, км
Наклонение орбит, град.
64,8
Система координат
ПЗ-90
WGS-84
–
Спутниковая навигационная система включает подсистему космических аппаратов, подсистему контроля и управления и подсистему аппаратуры потребителей.
Подсистема космических аппаратов состоит из 24 искусственных спутников Земли, обращающихся вокруг Земли по орбитам, близким к круговым, на высоте около 20000 км. У спутников системы GPS период обращения равен половине звездных суток. В любом месте Земли на высоте более 15° над горизонтом одновременно видны от 4 до 8 спутников.
Каждый спутник оснащен измерителем времени - водородным стандартом частоты, генерирующим опорную частоту МГц с суточной нестабильностью .
Спутник излучает радиосигналы на частотах МГц (длина волны 19 см) и МГц (длина волны 24 см). Сигнал на частоте L1 модулирован дальномерным кодом свободного доступа С/А (от англ. clear acquisition), точным кодом P (от англ. precise) и навигационным сообщением. Частота L2 модулирована только кодом Р. Коды представляют собой непрерывно излучаемые, образуемые по определенным алгоритмам синхронизированные псевдослучайные последовательности значений нулей и единиц.
Навигационное сообщение представляет собой файл, включающий следующие данные: коэффициенты полинома для вычисления ошибки часов спутника, элементы орбиты для вычисления пространственных прямоугольных координат спутника, параметры для вычисления ионосферной поправки, приближенные элементы орбит всех спутников и др.
Подсистема контроля и управления состоит из главной контрольной станции, станций слежения, управляющих станций. Подсистема предназначена для управления, информационного обеспечения спутников и контроля правильности их функционирования.
Станции слежения, наблюдая за движением спутников, выполняют траекторные измерения, результаты которых сообщают на главную контрольную станцию.
На главной контрольной станции по данным, полученным со станций слежения, вычисляют прогнозируемые параметры орбит спутников и другие элементы, входящие в текст навигационного сообщения.
Управляющие станции загружают подготовленную информацию на спутники.
Подсистема аппаратуры потребителей – это множество средств, выполняющих прием информации со спутников, измерение параметров, связывающих положение аппаратуры пользователя с расположением спутников, и их обработку. В результате обработки получают координаты аппаратуры потребителя и, если требуется, и вектор скорости движения.
Аппаратура, входящая в состав геодезического спутникового приемника (рис. 10.1), имеет общую массу от 4 до 8 кг, рабочий диапазон температур от -20° до +60°, продолжительность непрерывной работы аккумулятора 6–8 часов. Измерения в геодезии выполняют комплектом, состоящим из двух и более геодезических спутниковых приемников. При этом с высокой точностью определяют разности координат приемников, то есть их положение относительно друг друга.
Кодовые измерения. В приемнике спутниковых сигналов, как и на спутнике, есть датчик частоты и времени, в нем также вырабатываются частоты L1 и L2 (в одночастотном приемнике - только L1). Частота L1 модулируется копиями кодов С/А и Р, частота L2 - только кодом Р.
Интервал времени между появлением на приемнике собственного кода и аналогичного кода, пришедшего от спутника, измеряют.
Если бы часы приемника были точно синхронизированы с часами спутника, то формирование кодов на спутнике и в приемнике происходило бы одновременно. В этом случае измеренный интервал времени между появлениями на приемнике собственного кода и кода, пришедшего от спутника, был бы равен времени прохождения сигнала от спутника до приемника, что позволило бы вычислить расстояние до спутника. Однако показания часов спутника и приемника расходятся на некоторую величину, равную δs – δp, где δs – ошибка часов спутника, δp – ошибка часов приемника. Поэтому измеренное расстояние R существенно отличается от верного и носит название – псевдорасстояние.
Допустим, что ионо- и тропосферная задержки сигнала учтены путем введения соответствующих поправок. Тогда измеренное псевдорасстояние от пункта p до спутника s в эпоху (момент времени) t может быть представлено уравнением
,
где Xs(t), Ys(t), Zs(t) – координаты спутника в эпоху t; Xp, Yp, Zp – определяемые координаты приемника; c – скорость света.
Информация о часах спутника передается в составе навигационного сообщения, что дает возможность вычислить ошибку часов спутника на эпоху t и учесть ее.
Таким образом, для псевдорасстояния имеем уравнение
. (10.1)
Неизвестными величинами здесь являются Xp, Yp, Zp,δp(t). Для определения четырех неизвестных необходимо иметь не менее четырех уравнений, то есть в одну эпоху необходимо измерить псевдорасстояния не менее, чем до четырех спутников.
координаты определяются по результатам кодовых измерений с точностью около 3 м.
Для повышения точности пользуются дифференциальным методом. На контрольном пункте с известными координатами устанавливают приемник спутниковых сигналов и, определив его координаты по спутникам, вычисляют расстояния до спутников. Сравнив эти расстояния с вычисленными по известным координатам, определяют поправки и по радио сообщают их потребителям. Поправками исправляют псевдорасстояния, измеряемые потребителями, при этом ошибки определения места относительно контрольного пункта не превышают 1 м.
Кодовые измерения применяются при решении задач навигации. В геодезических работах кодовые измерения играют вспомогательную роль – служат для определения приближенных координат пунктов сети.
Фазовые измерения. Точные геодезические измерения выполняют на несущих частотах L1 и L2 (в одночастотных приемниках – только на частоте L1). При этом измеряют разности фаз между колебаниями, принятыми от спутника, и колебаниями такой же частоты, выработанными в приемнике.
Обозначим:
– фазу частоты , поступившей на приемник в эпоху t от спутника s;
– фазу собственной такой же частоты приемника в ту же эпоху.
Для указанных фаз справедливы уравнения:
Здесь r – расстояние от спутника до приемника;
с – скорость света;
– время, затраченное на путь сигнала от спутника до приемника;
– ошибка часов спутника;
– ошибка часов приемника.
Вычитая из первого фазового уравнения второе, получаем фазовое уравнение измеряемой разности фаз :
.
Перепишем его так:
.
Умножим уравнение на длину волны и учтем, что , где T – период колебаний. Получим
. (10.2)
Представим разность фаз виде суммы двух частей:
, (10.3)
где N – целое число периодов, а F – дробь.
Подставляя выражение (10.3) в (10.2), напишем:
. (10.4)
Расстояние между спутником и приемником непрерывно изменяется, отчего изменяется и сдвиг по фазе + F.
В приемнике спутниковых сигналов предусмотрено измерение непрерывно изменяющейся разности фаз F и подсчет числа переходов ее через нуль, изменяющих целое число волн в расстоянии. Это число прибавляется к измеряемой величине F, отчего суммарный сдвиг по фазе оказывается неправильной дробью, а неизвестное число N остается постоянным для всех расстояний от пункта p до спутника s. Определение целого числа N называется разрешением его неоднозначности.
Учитывая изложенное, напишем уравнение измеренного сдвига по фазе сигнала, принятого от спутника s на пункте p в эпоху t:
, (10.5)
где ;
– частота излучения.
Для ns спутников, nt эпох и одной точки p число измерений, а значит, и число уравнений (10.5) будет равно nsnt. Неизвестными в такой системе уравнений являются три координаты приемника (Xp, Yp, Zp),а также nsчисел неоднозначности и nt смещений часов приемника.
Разности фаз измеряют с высокой точностью, соответствующей долям миллиметра. Однако вычислить решением системы уравнений (10.5), составленных по результатам фазовых измерений, координаты приемника с указанной точностью не удается из-за ошибок орбиты, влияния ионосферы и других причин.
Точность фазовых измерений реализуют, применяя метод относительного определения положения пунктов. Результаты одновременных наблюдений одного и того же спутника в двух пунктах содержат значительные, но общие, близкие по величине погрешности. Поэтому разности результатов измерений от них практически свободны и позволяют с высокой точностью определять разности координат X, Y, Z двух пунктов, то есть трехмерный вектор DX, DY, DZ, их соединяющий. Следовательно, зная координаты X, Y, Z одного пункта, можем, определив разности координат DX, DY, DZ до другого, вычислить и его координаты.
Фазовые измерения в геодезических работах являются основными, обеспечивая возможность построения геодезических сетей высокой точности.
10.3 Режимы и методы спутниковых геодезических измерений
Спутниковая геодезическая аппаратура обеспечивает возможность работы в различных режимах.
В режиме "Статика" одновременные измерения на двух или нескольких пунктах выполняются неподвижными приемниками. Один из приемников принимают за базовый. Положение остальных приемников определяется относительно базового. Измерения в режиме "Статика" выполняют, как правило, на больших расстояниях между пунктами (свыше 15 км). Время наблюдений зависит от расстояния между пунктами, числа спутников, состояния ионо- и тропосферы, требуемой точности и составляет обычно не менее 1 ч.
Режим "Быстрая статика" позволяет сократить продолжительность измерений, благодаря возможности применения на линиях до 15 км активных алгоритмов разрешения неоднозначности. Продолжительность наблюдения в этом режиме составляет 5-20 мин.
Режим "Реоккупация" используется, когда нет одновременной видимости на необходимое число спутников. Тогда измерения выполняют за несколько сеансов, накапливая нужный объем данных. На этапе компьютерной обработки все данные объединяют для выработки одного решения.
Режим "Кинематика" служит для определения координат передвижной станции в ходе ее перемещения. При работе в этом режиме необходимо, чтобы приемники на базовой и передвижной станциях поддерживали непрерывный контакт со спутниками в течение всего времени измерений. До начала движения выполняют инициализацию – разрешение неоднозначности фазовых измерений.
Режим "Cтой–иди" - такая разновидность кинематического режима, когда передвижную станцию перемещают с точки на точку, делая на каждой точке остановку и выполняя для повышения точности несколько эпох измерений в течение 5-30 с.
Значения средних квадратических погрешностей определения положения, мм, принято характеризовать формулой
m = a + bD,
где D - расстояние между базовым и подвижным приемниками, км.
Значения параметров a и b приведены в табл. 10.2.
Таблица 10.2
Параметры, характеризующие точность определения положения
Режим измерений
Аппаратура
двухчастотная
одночастотная
a, мм
b, мм/км
a, мм
b, мм/км
статика
быстрая статика
5…10
реоккупация
10…20
10…20
кинематика
10…20
20…30
Стой–иди
5…10
10…20
Возможные схемы построения геодезической сети с помощью спутниковых измерений показаны на рис. 10.2. Каждая линия на схеме указывает, что на концах линии установлены спутниковые приемники, с помощью которых выполняют синхронные измерения, определяющие приращения координат DX, DY, DZ по данной линии.
Геодезическая сеть может быть построена с применением лучевого и сетевого методов.
При лучевом методе координаты определяемого пункта получают (рис. 10.2, а), измерив вектор, соединяющий его с опорным пунктом. Для контроля координаты определяют дважды, то есть по результатам измерений, связывающих определяемый пункт с двумя опорными пунктами (рис. 10.2, б).
При сетевом методе (рис. 10.2, в) определяемые пункты связывают измерениями не только с опорными пунктами, но и между собой.
Возможны сети, где одну часть пунктов сети определяют сетевым, а другую - лучевым методом.
а, б – лучевой метод; в – сетевой метод; обозначения:
- опорный пункт; ¡ - определяемый пункт
Спутниковые технологии координатных определений имеют существенные преимущества перед традиционными. Им свойственны высокая точность, независимость от погоды и времени суток, оперативность, возможность определения координат при отсутствии взаимной видимости между пунктами. В то же время в закрытой и полузакрытой местности (лес, городские кварталы) применять их довольно трудно. В таких случаях спутниковые методы сочетают с традиционными. При этом возможны такие варианты:
– развитие сети традиционными методами от пунктов, определенных спутниковыми приемниками;
– развитие сети спутниковыми методами от пунктов, определенных традиционными методами;
– ступенчатое развитие сетей, при котором спутниковые и традиционные измерения чередуются.
Для определения координат пунктов с помощью спутниковой аппаратуры выполняют следующие работы:
– подготовительные, которые включают составление проекта сети, рекогносцировку и уточнение проекта, закладку центров на определяемых пунктах;
– измерения, которые включают развертывание аппаратуры, соединение кабелями ее частей, центрирование и ориентирование антенны, определение высоты антенны, установку карты памяти, ввод названия пункта и высоты антенны, выбор нужного режима измерений, после чего измерения и регистрация результатов выполняются автоматически;
– обработку результатов измерений с использованием программных пакетов, прилагаемых к спутниковой аппаратуре.
10.4 Погрешности спутниковых измерений
Влияние атмосферы. К числу основных источников погрешностей спутниковых измерений относится неточное знание скорости радиосигнала на пути от спутника к приемнику. Наибольшее влияние на эту скорость оказывает состояние ионосферы – верхних слоев атмосферы, где газ содержит большое число свободных электронов и положительных ионов. Ионизация происходит в основном за счет энергии Солнца. Ионосфера окружает Землю в виде ионизированных слоев, расположенных на высотах от 60–90 до 500–1000 км.
В ионизированной среде показатель преломления для радиодиапазонов, используемых в системах GPS и ГЛОНАСС, зависит от частоты. При этом скорость распространения колебаний одной частоты (фазовая скорость) отличается от скорости распространения результирующей энергии колебаний нескольких близких частот (групповая скорость). Поэтому результаты фазовых и кодовых измерений искажаются различно.
Погрешности псевдорасстояний, вызванные влиянием ионосферы, характеризуются формулами:
где dion(ф) – погрешность результата фазовых измерений;
NS - количество электронов в вертикальном столбе ионосферы сечением 1 м2;
n - угол наклона траектории сигнала.
Видим, что ошибки, вызванные ионосферной рефракцией, в фазовых и кодовых измерениях равны по величине, но противоположны по знаку. Измеренные кодовые псевдорасстояния оказываются длиннее, а фазовые – короче геометрических дальностей.
Величина ионосферных ошибок измеренных псевдорасстояний зависит от многих причин (солнечной активности, времени суток, места, направления трассы сигнала) и может иметь значения от 0,15 м до 50 м.
Ионосферные ошибки кодовых измерений уменьшают комбинированием результатов измерений на двух частотах, а в одночастотных приемниках - введением поправок.
Ионосферные ошибки фазовых измерений ослабляют, применяя метод относительных определений, изложенный в конце п. 10.2. Результаты одновременных фазовых измерений в двух пунктах сигнала одного и того же спутника содержат практически одинаковые погрешности, вызванные влиянием ионосферы. Поэтому разность результатов таких измерений от них практически свободна.
На распространение сигнала влияет также тропосферная рефракция, под которой понимают задержку радиосигналов в нейтральных слоях атмосферы - стратосфере и тропосфере, где показатель преломления радиоволн с частотами до 15 ГГц от частоты радиосигнала не зависит и потому одинаков для обеих несущих частот L1, L2 и кодовых сигналов. Погрешности кодовых и фазовых измерений, вызванные тропосферной рефракцией, характеризуются формулой
Для расчета тропосферных ошибок пользуются различными аппроксимациями высотного профиля показателя преломления, к числу которых относится, в частности, экспоненциальная модель:
где NP – значение индекса преломления на высоте приемника HP;
Nt – значение индекса преломления на высоте Ht – на границе тропо- и стратосферы.
При этом Ht = 9000 м; Nt = 105; ;
м–1.
Значение индекса преломления у земной поверхности зависит от метеорологических факторов и может быть вычислено по формуле
,
где P – атмосферное давление, мбар;
Т – температура, К;
e – парциальное давление водяного пара, мбар.
Многопутность. В ряде случаев спутниковым приемником, кроме полезного прямого сигнала, могут быть приняты сигналы, отраженные земной поверхностью или близлежащими объектами (например, зданиями), а также сигналы, обогнувшие вследствие дифракции мелкие предметы. Многопутность приводит к искажению дальностей (рис. 10.3).
Рис. 10.3 Многопутность сигнала:
1 – прямой луч; 2 – луч, отраженный от земли;
3 – луч, отраженный от стены
Определим разность хода DR между отраженным от земной поверхности 2 и прямым 1 лучами. В точках А и В расстояние до ИСЗ одинаковы. Тогда
DR = AC – BC = AC (1 – cos2a) = 2 AC sin2a = 2 h sina, (10.3)
где h – высота установки антенны (обычно 1–2,5 м);
a – угол наклона радиолуча.
Анализ формулы (10.3) показывает, что установка антенны возможно ближе к земле позволяет уменьшить влияние сигналов, отраженных от земной поверхности. В предельном случае при h = 0 будем иметь DR = 0.
Меры по исключению влияния многопутности:
установка антенны в местах, где отсутствуют отражающие поверхности;
использование антенн, на которых установлены экраны, отсекающие отраженные от земной поверхности лучи.
11 Наземные СЪеМКи МЕСТНОСТИ
11.1 Общие сведения о съемке местности
Топографической съемкой называется комплекс работ по созданию плана местности. План может быть составлен в графическом виде или с применением современных технологий – в цифровом виде как цифровая модель местности (ЦММ).
различают съемки:
§ наземные, когда работы по сбору информации о местности выполняют на земной поверхности;
§ аэрокосмические, когда сбор информации выполняется с помощью приборов, находящихся на летательных аппаратах (самолетах, вертолетах, искусственных спутниках Земли и др.).
В зависимости от применяемых приборов среди наземных видов съемки различают: теодолитную, мензульную, тахеометрическую, стереофотограмметрическую (фототеодолитную) и сканерную. При этом фототеодолитные и сканерные съемки используют аппаратуру и методы, аналогичные применяемым в аэрокосмических съемках, поэтому они будут рассмотрены отдельно (см. разд. 13).
В ряде случаев выполняется съемка только контуров местных предметов (без отображения рельефа). Такую съемку называют горизонтальной, или контурной. Съемку только рельефа называют вертикальной.
При картографировании больших территорий основными являются аэрофототопографическая и космическая съемки. При выполнении работ под строительство различных объектов обычно применяют наземные виды съемки: тахеометрическую и теодолитную и реже – мензульную. Вид съемки выбирают с учетом экономических затрат на ее выполнение, площади снимаемого участка, наличия геодезических приборов, подготовленности исполнителей и др.
Наземная съемка местности включает создание съемочной сети, съемку подробностей, обработку результатов измерений с составлением плана местности.
Съемочная сеть – это совокупность закрепляемых на местности точек, положение которых в плане и по высоте определяют в принятой для съемки системе координат и высот.
Плановую съемочную сеть чаще всего создают в виде системы замкнутых и разомкнутых теодолитных ходов. В таких ходах длиной до 1,2 км относительные невязки не должны превышать 1:2000, а угловые невязки – , где n – число углов в ходе. Съемочная сеть должна опираться не менее чем на два исходных пункта высшего класса.
Высоты пунктов съемочной сети определяют, как правило, методом геометрического нивелирования. Сеть должна быть привязана не менее чем к двум реперам высшего класса. При этом невязки ходов (в миллиметрах) не должны превышать , где L – длина хода, км.
При съемке с сечением рельефа через 2 и 5 м, а также при съемке всхолмленной местности с сечением рельефа через 1 м высотное съемочное обоснование можно создавать методом тригонометрического нивелирования. В этом случае высотные невязки в ходах не должны превышать допуска 0,0004× , где P – длина хода и n – число линий в ходе.
Для съемки небольших участков местности съемочная сеть может быть построена в местной системе координат и высот без привязки к пунктам высшего класса.
Часть пунктов съемочной сети (2-3 пункта на съемочный планшет) закрепляют на местности знаками долговременной сохранности - бетонными пилонами, заложенными в землю на глубину до 80 см. Остальные пункты закрепляют временными знаками - металлическими трубами, деревянными столбами, кольями.
Опираясь на пункты съемочной сети, выполняют съемку подробностей - контуров и рельефа местности. При съемке подробностей определяют положение съемочных пикетов – точек, расположенных в характерных местах контуров или рельефа. Нанеся пикеты на план, рисуют контуры местных предметов и горизонтали.
11.2 Теодолитная съемка
Теодолитной съемкой называют горизонтальную съемку, выполняемую с помощью теодолита и мерных приборов (лент, рулеток) или дальномера.
Теодолитную съемку выполняют для составления крупномасштабных контурных планов внутриквартальной застройки городов, населенных пунктов в сельской местности, внутризаводских территорий, железнодорожных станций, подъездных путей промышленных предприятий.
Съемочной основой теодолитной съемки служат, как правило, теодолитные ходы(замкнутые и разомкнутые). При необходимости сгущение съемочной сети может быть выполнено путем определения координат дополнительных точек засечками - полярной, линейной, угловой, опирающимися на пункты проложенных ранее теодолитных ходов.
Съемку ситуации выполняют путем измерений, связывающих положение характерных контурных точек объектов с пунктами съемочной основы. Наиболее распространены следующие способы съемки.
Способ прямоугольных координат обычно применяют при съемке объектов с четкими контурами. Так, при съемке здания (см. рис. 11.2, а) из каждой характерной точки его контура на сторону теодолитного хода опускают перпендикуляр и измеряют расстояние по стороне хода до основания перпендикуляра (координата x) и длину перпендикуляра (координата y). Расстояния измеряют рулеткой или лентой. Для контроля выполняют обмер здания.
а)
б)
4
1
2
3
2
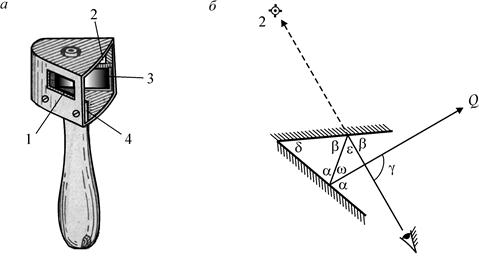
Рис. 11.1 Двухзеркальный экер:
а – вид прибора: 1, 2 – окна; 3, 4 – зеркала; б – ход лучей:
2 – пункт съемочной сети; Q – направление перпендикуляра
При построении перпендикуляров длиной более 8 м пользуются экером. Экер (рис. 11.1, а) имеет два зеркала 3 и 4, расположенных под углом d = 45°. Луч, падающий на одно из зеркал, после двойного отражения выходит под прямым углом g к исходному направлению. Действительно (см. рис. 11.1 б):
g = 180° - (w + e) = 180° - [(180° - 2a) + (180° - 2b)] = 180° - 360° + + 2×(a + b) = 180° - 2×[180° - (a + b)] = 180° - 2d.
Следовательно, при d = 45° имеем g = 90°.
Экер позволяет находить на стороне теодолитного хода 1–2 (см. рис. 11.2, а) точку, в которой линия хода и направление на съемочный пикет (угол здания) взаимно перпендикулярны. В этой точке в окне экера 2 (см. рис. 11.1, а) видна веха, установленная на пункте теодолитного хода, а под ней в зеркале – изображение угла здания.
в)
г)
б)
а)
Рис. 11.2 Способы съемки ситуации:
а – прямоугольных координат; б – угловой засечки;
в – линейной засечки; г – полярных координат
Способ угловой засечки применяют при съемке удаленных или недоступных объектов. Так, для определения положения центра водонапорной башни (рис. 11.2, б) на пунктах съемочной сети 1 и 2 теодолитом измеряют горизонтальные углы b1 и b2. Наилучший угол g для засечки - 90°. Практически угол g должен быть в пределах от 30° до 150°.
Способ линейной засечки (рис. 11.2, в). Положение точки M определяют, измеряя расстояния до точек, положение которых известно. Способ удобен, когда расстояния не превышают длины применяемого мерного прибора.
Способ полярных координат (рис. 11.2, г). Для определения положения точки 1 измеряют горизонтальный угол b и расстояние d.
Результаты выполненных в ходе съемки измерений записывают в полевой журнал. Одновременно составляют абрис – схематический чертеж, на котором в произвольном масштабе показывают расположение пунктов съемочной сети и снимаемых объектов, характеристики снимаемых объектов и результаты измерений.
Составление плана выполняют в следующем порядке.
Вычисляют координаты пунктов съемочной основы (вершин теодолитных ходов и точек, полученных засечками).
Разбивают на планшете сетку прямоугольных координат и оцифровывают ее.
Наносят на план пункты съемочной сети.
Наносят на план съемочные пикеты и вычерчивают контуры.
Оформляют план в соответствии с руководством "Условные знаки".

 МГц с суточной нестабильностью
МГц с суточной нестабильностью  .
.
 МГц (длина волны 19 см) и
МГц (длина волны 19 см) и  МГц (длина волны 24 см). Сигнал на частоте L1 модулирован дальномерным кодом свободного доступа С/А (от англ. clear acquisition), точным кодом P (от англ. precise) и навигационным сообщением. Частота L2 модулирована только кодом Р. Коды представляют собой непрерывно излучаемые, образуемые по определенным алгоритмам синхронизированные псевдослучайные последовательности значений нулей и единиц.
МГц (длина волны 24 см). Сигнал на частоте L1 модулирован дальномерным кодом свободного доступа С/А (от англ. clear acquisition), точным кодом P (от англ. precise) и навигационным сообщением. Частота L2 модулирована только кодом Р. Коды представляют собой непрерывно излучаемые, образуемые по определенным алгоритмам синхронизированные псевдослучайные последовательности значений нулей и единиц.
 от пункта p до спутника s в эпоху (момент времени) t может быть представлено уравнением
от пункта p до спутника s в эпоху (момент времени) t может быть представлено уравнением
 ,
, . (10.1)
. (10.1) – фазу частоты
– фазу частоты  , поступившей на приемник в эпоху t от спутника s;
, поступившей на приемник в эпоху t от спутника s; – фазу собственной такой же частоты приемника в ту же эпоху.
– фазу собственной такой же частоты приемника в ту же эпоху.
 – время, затраченное на путь сигнала от спутника до приемника;
– время, затраченное на путь сигнала от спутника до приемника; – ошибка часов спутника;
– ошибка часов спутника; – ошибка часов приемника.
– ошибка часов приемника. :
: .
. .
. и учтем, что
и учтем, что  , где T – период колебаний. Получим
, где T – период колебаний. Получим . (10.2)
. (10.2) , (10.3)
, (10.3) . (10.4)
. (10.4) + F.
+ F. , (10.5)
, (10.5) ;
; – частота излучения.
– частота излучения. Неизвестными в такой системе уравнений являются три координаты приемника (Xp, Yp, Zp),а также ns чисел неоднозначности и nt смещений часов приемника.
Неизвестными в такой системе уравнений являются три координаты приемника (Xp, Yp, Zp),а также ns чисел неоднозначности и nt смещений часов приемника.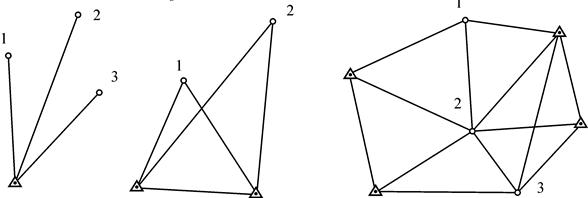
 - опорный пункт; ¡ - определяемый пункт
- опорный пункт; ¡ - определяемый пункт

 ;
;
 м–1.
м–1. ,
,
 , где n – число углов в ходе. Съемочная сеть должна опираться не менее чем на два исходных пункта высшего класса.
, где n – число углов в ходе. Съемочная сеть должна опираться не менее чем на два исходных пункта высшего класса. , где L – длина хода, км.
, где L – длина хода, км. , где P – длина хода и n – число линий в ходе.
, где P – длина хода и n – число линий в ходе.