Сплайн (англ. spline – планка, рейка) – функция, область определения которой разбита на конечное число отрезков, на каждом из которых сплайн совпадает с некоторой алгебраической функцией. Максимальная степень использованных функций (обычно это полиномы) называется степенью сплайна. Разность между степенью сплайна и гладкостью его очертания (отсутствие разрывов по координатам, по первой и второй производным) называется дефектом сплайна. Например, непрерывная ломаная из отрезков прямых есть сплайн степени 1 и дефекта 1 (в точках сопряжения отрезков сплайна происходит разрыв первой производной – гладкость нарушается).
Сплайны имеют многочисленные применения, как в математической теории, так и в разнообразных вычислительных приложениях. В частности, сплайны двух переменных интенсивно используются для задания поверхностей в различных системах компьютерного моделирования.
При сплайн-интерполяции, показанной на рис. 2.8, исходная функция заменена отрезками кубических парабол, проходящих через четыре смежные узловые точки. Коэффициенты парабол рассчитываются так, чтобы в точках сопряжения фрагментов сплайна совпадали координаты, а также первая и вторая производные (дефект сплайна равен нулю).
Линия, которую описывают такие сплайн-функции, напоминает по форме гибкую линейку, закрепленную в узловых точках.
Расчет сплайна обычно сводится к решению системы линейных уравнений.
2.4. Аппроксимация
Широко распространенной задачей обработки и моделирования данных является представление их совокупности некоторой функцией f(x). Задача аппроксимации заключается в получении параметров этой функции, таких, чтобы функция приближала «облако» исходных точек с наименьшейсреднеквадратичной погрешностью. В основе аппроксимации обычно лежит метод наименьших квадратов.
2.4.1. Полиномиальная аппроксимация
Полином – выражение вида: у=а0+а1Чх+а2Чх2+...+аnЧxn
В каждой из n точек, для которых известны значения xiи yi, найдем сумму квадратов отклонений вычисленных и измеренных значений
.
Для того чтобы отыскать наилучшее приближение, необходимо найти минимум этой функции для переменных: ао, а1, а2, ..., аn.
Решение: продифференцируем функцию f по каждой из этих переменных и приравняем производную нулю. После несложных преобразований получим систему линейных уравнений. Решив эту систему, можно найти неизвестные коэффициенты полинома ао, а1, а2, ..., аn.
Коэффициенты при неизвестных
Свободный
an
...
a2
ao
член
...
...
...
...
....
.....
....
...
N
Пример полиномиальной аппроксимации данных представлен на рис. 2.10.
Рис. 2.10 Полиномиальная аппроксимация
2.4.2. Линейная аппроксимация
Частным, но и наиболее востребованным случаем полиномиальной аппроксимации является линейная аппроксимация. При линейной аппроксимации функция y(x) описывает отрезок прямой и имеет вид y(x) = a + bx (рис. 2.11).
Рис. 2.11. Линейная аппроксимация
2.4.3. Метод наименьших квадратов для произвольной функции
Функция y(x)может быть представлена произвольной дифференцируемой функцией (рис. 2.12). На практике не рекомендуется использовать функции со степенями выше 4-6 – погрешности реализации при этом сильно возрастают.
Рис. 2.12. Аппроксимация произвольными функциями
2.5. Сглаживание данных
Данные большинства экспериментов имеют случайные составляющие (шумят), поэтому возникает необходимость статистического сглаживания данных.
При этом вычисляется множество Z=z1,z2,...zn сглаженных значений функции f(x,y), заданной множествами значений аргумента X=x1,x2,...xn и Y=y1,y2,...yn соответствующих значений функции.
Сглаживание функции, заданной таблицей значений в неравноотстоящих точках, с помощью многочлена первой степени, построенного по k (не менее трех точек) последовательным точкам методом наименьших квадратов (рис. 2.13).
Рис. 2.13. Сглаживание данных
При k=3 – по каждым трем последовательным точкам (xj-2,yj-2),(xj-1,yj-1), (xj,yj) для j=3,...n строится последовательность многочленов первой степени Wj(x)=mjx+bj, дающих в этих точках наименьшее отклонение от заданных в смысле наименьших квадратов.
Определение коэффициентов mj и bj многочлена Wj(x)производится методом наименьших квадратов.
Искомые сглаженные значения zj = Wj(x) = mjx + bj вычисляются по формуле:
2.6. Экстраполяция данных (предсказание)
При экстраполяции по ряду заданных точек рассчитывается некоторое число N последующих точек.
На рис. 2.14 сплошной линией показан график функции, описывающий положение заданных точек, пунктирной – предсказание (экстраполяция графика) [3].
Рис. 2.14. Экстраполяция данных
2.7. Численное дифференцирование
Геометрическая интерполяция первой производной – она равна тангенсу угла наклона касательной.
При вычислении производной функции , заданной таблицей – нужно определить значения функции y слева и справа на равном расстоянии от того значения x, для которого мы хотим подсчитать величину производной, и разделить их разность на h (практически это сводится к приближенному определения тангенса угла наклона касательной, чем меньше h, тем точнее результат (рис. 2.15):
Рис. 2.15. Численное дифференцирование
.
Значения можно найти интерполяцией.
2.8. Вычисление определенного интеграла
Геометрическая интерпретация определенного интеграла – площадь геометрической фигуры, образованной графиком подынтегральной функции и осью абсцисс на интервале .
Простой и вместе с тем хороший способ состоит в следующем: участок интегрирования разбивается на несколько равных малых интервалов. Интеграл по каждому малому интервалу приближенно считаем равным произведению длины интервала на среднее значение подынтегральной функции в его начале и конце. Этот способ называется методом трапеций, потому что получается такой результат, как если бы в каждом малом интервале дуга графика заменяется ее хордой, а площадь под этой дугой (величина интеграла) заменяется площадью получившейся трапеции с вертикальными основаниями (рис. 2.16).
Рис. 2.16. Метод трапеций
Соответствующая формула имеет вид:
,
где для краткости обозначено .
Еще более эффективную формулу можно получить, если кривую на малом интервале заменить параболой, т.е. графиком квадратичной зависимости.
Разделим участок интегрирования от x = a до x = b на четное число равных интервалов. Границы интервалов: . Длину интервала обозначим h, так что .
,
где .
Эта формула называется формулой Симпсона. Преимущества формулы Симпсона по сравнению с формулой трапеций особенно сказывается при увеличении числа n интервалов разбиения. Можно показать, что при этом ошибка формулы трапеций убывает обратно пропорционально n2, а ошибка формулы Симпсона – обратно пропорционально n4.
2.9. Численное решение дифференциальных уравнений
Дифференциальное уравнение первого порядка: ,
где y – неизвестная функция от x.
Обычно считается, что это уравнение разрешимо относительно производной, т.е. имеет вид: . Для решения уравнения необходимо задание начальных условий: x = x0 и y = y0.
Если уравнение имеет вид и заданы начальные условия x=x0 и y=y0, то, подставляя значения x0 и y0 в функцию , мы найдем величину производной в точке x0: .
Значение функции: , где Dx – малое приращение x.
Отсюда значение функции y1 = y (x1) = ,
где x1 = x0 + Dx.
Теперь, принимая точку (x1,y1) за исходную, можно точно таким же образом получить точку y2 = y (x2) = , где x2 = x1 + Dx. Таким образом, шаг за шагом, можно последовательно вычислять значения функции для различных x.
Примером дифференциального уравнения первого порядка является основное уравнение движения поезда: , где - удельная равнодействующая сила, зависящая от скорости.
Построение кривой скорости движения поезда в функции пройденного пути производится на основе графического или аналитического интегрирования основного уравнения движения поезда:
, где – удельная равнодействующая сила. (1)
Для графического интегрирования основного уравнения движения поезда был разработан ряд методов (метод Липеца, метод Упрейна), в основе которых лежит аппроксимация кривой скорости отрезками касательных (Липец) или дуг (Упрейн).
Методы аналитического интегрирования обычно связываются с использованием метода Эйлера и на основании этого, в полном соответствии с известными из математики положениями, делается вывод о точности построения кривой .
В основе метода ломаных Эйлера лежит идея графического построения решения дифференциального уравнения. Этот метод дает одновременно и способ нахождения искомой функции в численной (табличной) форме.
Идея метода заключается в том, что на малом промежутке изменения независимой переменной интегральная кривая дифференциального уравнения заменяется отрезком прямой (касательной) .
Отсюда , и процесс можно повторить для промежутка и т.д. Число h является шагом таблицы.
Рабочая формула для определения значений y по методу Эйлера имеет вид , где
Геометрическая интегральная кривая заменяется ломаной, называемой ломаной Эйлера (рис. 2.17).
Метод Эйлера обладает малой точностью, к тому же погрешность каждого нового шага, вообще говоря, систематически возрастает. Наиболее приемлемым для практики методом оценки точности является в данном случае метод двойного счета – с шагом h и с шагом h/2. Совпадение десятичных знаков в полученных двумя способами результатах дает естественные основания считать их верными. Ошибка метода пропорциональна h2. Существуют различные уточнения метода Эйлера, повышающие его точность так, что ошибка метода становится пропорциональной h3.
Рис. 2.17. Интегральная кривая и ломаная Эйлера
На рис. 2.18 показана кривая скорости, построенная в полном соответствии с вычислительной схемой метода Эйлера.
Рис. 2.18. Предполагаемая схема построения кривой скорости
При этом все методы аналитического и графического интегрирования основного уравнения движения поезда основаны на реализации другой вычислительной схемы.
На рис. 2.19 показана кривая скорости, построенная в соответствии с фактически реализуемым алгоритмом.
Рис. 2.19. Фактическая схема построения кривой скорости
Как видно, построение совпадает лишь на первом шаге, а на следующих – принципы построения кривой различаются. Фактическая погрешность построения во втором случае не только меньше, чем в первом, но и имеет явную тенденцию к дальнейшему уменьшению.
Причиной такого несоответствия является, вероятно, следующее.
При построении кривой скорости основное уравнение движения поезда приводится к виду
или (2)
Данное уравнение отличается от уравнения 1, для решения которого, собственно, и предназначен метод Эйлера. При этом, производная (тангенс угла наклона касательной в геометрической интерпретации) не может быть определена изначально, а вычисляется путем подбора приращения единственной независимой переменной V. Функциональная зависимость величины производной от пути S не входит в правую часть уравнения 2. Это константа, зависящая от приведенного уклона под поездом и изменяющаяся лишь при его изменении, сохраняя все признаки именно константы.
То же относится и к построению кривой скорости интегрированием основного уравнения движения поезда по времени, когда приращение пути также подбирается по приращению скорости за определенный интервал времени.
Основное уравнение движения поезда можно интегрировать только по скорости – единственной действительно независимой переменной, входящей в его состав, а метод Эйлера предполагает интегрирование по пути.
Оценка реальной точности построения кривой скорости относится к области статистических исследований. Практически все исходные данные тягового расчета, за исключением данных о продольном профиле и плане пути, являются среднестатистическими.
Поэтому повышение точности тягового расчета следует понимать как освобождение используемой вычислительной технологии от собственных погрешностей, допущений и упрощений в целях приближения, если не к точному, то к математически ожидаемому результату.
Современный уровень развития вычислительной технике снимает практически все ограничения для повышения точности тягового расчета в этом ее понимании.
Точность построения кривой скорости существенно зависит от шага интегрировании – препятствий для уменьшения шага сейчас не существует.
Точность построения можно увеличить, реализуя алгоритмы с возвратами, когда, после вычисления приращения скорости по касательной, построенной в начале интервала, делается пересчет приращения по касательной в средней его части с повторами до стабилизации численного решения.
Пределом повышения точности является, вероятно, реализация алгоритма с возвратами при пересчете приращения скорости не по величине равнодействующей при средней скорости , а по среднему знамению равнодействующей , где - начальная и конечная скорость на интервале.
Все эти алгоритмы легко реализуемы в современных условиях.
С точки зрения организации вычислительного процесса наиболее привлекательным является выбор в качестве шага интегрирования приращение времени. В этом случае автоматически оптимизируются, с точки зрения точности и быстродействия алгоритма, приращения скорости и, соответственно, пути на каждом шаге расчета.
При малых скоростях малы и приращения пути, обеспечивая высокую точность построения . При увеличении скорости поезда приращения пути растут, повышая и скорость построения . Приращения скорости при этом невелики и начинают уменьшаться по мере приближения к установившейся скорости, снимая, таким образом, проблему принудительного изменения шага интегрирования при различных скоростях движения поезда.
На рис. 2.20 приведены графики приращений пути и скорости, полученные при построении кривой путем аналитического интегрирования основного уравнения движения поезда по времени ( мин) на площадке с разгоном поезда до установившейся скорости.
Именно такой подход реализован в известной программе тяговых расчетов «ЭРА-ТЭП» – типовой программе ОАО РЖД (Анисимов В.А., ДВГУПС).
Рис. 2.20. Кривая скорости (а) и графики приращений пути и скорости в функции пройденного пути (б)
2.10. Моделирование рельефа местности
Конечным итогом инженерно-геодезических и инженерно-геологических изысканий в настоящее время является цифровая модель местности.
Цифровая модель местности (ЦММ) – множество, элементами которого является топографо-геодезическая информация о местности. Она включает в себя:
- метрическую информацию – геодезические пространственные координаты характерных точек рельефа и ситуации;
- синтаксическую информацию для описания связей между точками – границы зданий, лесов, пашен, водоемов, дороги, водораздельные и водосливные линии, направления скатов между характерными точками на склонах и т.п.;
- семантическую информацию, характеризующая свойства объектов – технические параметры инженерных сооружений, геологическая характеристика грунтов, данные о деревьях в лесных массивах и т.п.;
- структурная информация, описывающая связи между различными объектами – отношения объектов к какому-либо множеству: раздельные пункты железнодорожной линии, здания и сооружения населенного пункта, строения и конструкции соответствующих производств и т.п.;
- общую информацию – название участка, система координат и высот, номенклатура.
Топографическая ЦММ характеризует ситуацию и рельеф местности. Она состоит из цифровой модели рельефа местности (ЦМР) и цифровой модели контуров (ситуации) местности (ЦМК). Кроме этого ЦММ может дополняться моделью специального инженерного назначения (ЦМИ).
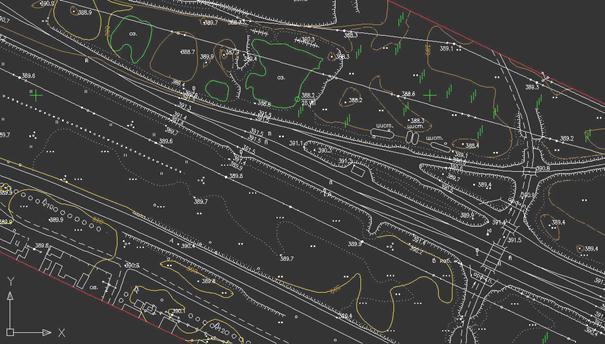
В инженерной практике часто используют сочетание цифровых моделей, характеризующих ситуацию, рельеф, гидрологические, инженерно-геологические, технико-экономические и другие показатели. Цифровая модель местности, записанная на машинном носителе, в определенных структурах и кодах представляет собой электронную карту (рис. 2.21).
Рис. 2.21. Электронная карта на основе ЦММ полученной по данным лазерного сканирования
При решении инженерно-геодезических задач на ЭВМ применяют математическую интерпретацию цифровых моделей. Ее называют математической моделью местности (МММ).
Автоматизированное проектирование на основе ЦММ и МММ сокращает затраты труда и времени в десятки раз по сравнению с использованием для этих целей бумажных топографических карт и планов.
Исходными данными для создания цифровых моделей местности являются результаты топографической съемки, данные о геологии и гидрографии местности.
Цифровая модель рельефа местности (ЦМР) представляет собой массив координат съемочных точек X,Y,H.
Математическая модель рельефа (ММР) объединяет цифровую модель рельефа и методы аппроксимации точек съемки и интерполяции поверхности земли между ними.
Существует большое число типов ЦМР и ММР, каждая из которых отличается способом аппроксимации рельефа, моделируемого сетью точек съемки и правилами аппроксимации точек съемки и интерполяции – порядка вычисления отметки H точки, заданной координатами X,Y в общем случае, то есть когда данная точка не совпадает ни с одной из точек съемки.
Возможна линейная и сплайновая интерполяция отметок.
По цифровой модели рельефа можно получить продольный профиль земли по любому назначенному направлению (рис. 2.22).
Рис. 2.22. Цифровая модель рельефа и продольный профиль земли по заданному направлению
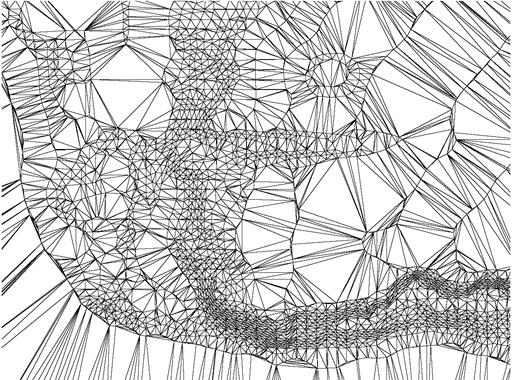
Наиболее распространенной является триангуляционная модель рельефа местности (TIN) с линейной интерполяцией отметок.
Суть модели TIN в ее наименовании – «Нерегулярная треугольная сеть» (в английском оригинале – Triangulated Irregular Network). В своем пространственном выражении это сеть треугольников с высотными отметками в узлах, что позволяет представить моделируемую поверхность как многогранную (рис. 2.23).
Рис. 2.23. Пример триангуляции
Впервые задача построения триангуляционной модели была поставлена в 1934 г. в работе советского математика Б.Н. Делоне.
Для понимания метода триангуляции Делоне необходимо ввести несколько определений.
Определение 1. Триангуляцией называется планарный граф, все внутренние области которого являются треугольниками (рис. 2.23).
Определение 2. Задачей построения триангуляции по заданному набору двумерных точек называется задача соединения заданных точек непересекающимися отрезками так, чтобы образовалась система непересекающихся треугольников. Задача построения триангуляции по исходному набору точек является неоднозначной, т.е. имеет множество решений.
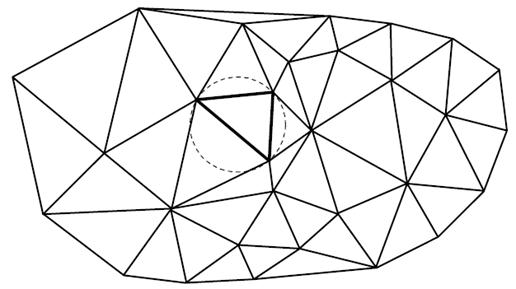
Определение 3. Триангуляция называется оптимальной, если сумма длин всех рёбер минимальна среди всех возможных триангуляций, построенных на тех же исходных точках (при этом внутрь окружности, описанной вокруг любого построенного треугольника, не попадает ни одна из заданных точек триангуляции) (рис. 2.24).
Рис. 2.24. Триангуляция Делоне
Все известные в настоящее время системы автоматизированного проектирования (САПР) поддерживают функцию создания TIN.
2.11. Моделирование продольного профиля и плана при реконструкции железных дорог
В процессе эксплуатации под воздействием движущихся поездов и природных явлений ось железнодорожного пути теряет правильное геометрическое очертание в плане и продольном профиле, что приводит к ухудшению динамики движения поездов, увеличению износа пути и подвижного состава. Периодически в процессе ремонтов и при реконструкции дороги план и продольный профиль приводятся к правильному геометрическому очертанию, что требует производства соответствующих расчетов и моделирования исходных данных.
При реконструкции железных дорог исходными данными для расчетов являются результаты съемки существующего пути в плане и продольном профиле.
Цифровая модель продольного профиля (рис. 2.25) позволяет использовать оптимизационные и интерактивные методы проектирования, получить отметки головки рельса между точками съемки. За ось абсцисс всегда принимается ось пути.
Рис. 2.25. Моделирование продольного профиля железных дорог
Проектные отметки продольного профиля вычисляются с учетом наличия вертикальных кривых, устраиваемых в местах переломов проектной линии при достижении разностью уклонов сопрягаемых элементов определенной величины, точнее, если поправка от вертикальной кривой превышает 0,01 м и алгебраическая разность уклонов , где RV - радиус вертикальной кривой (рис. 2.26).
Рис. 2.26. Вертикальная кривая, расчетная схема
В общем случае проектная отметка определяется по следующему алгоритму:
- отметка перелома профиля;
- уклон j-го элемента профиля;
- разность уклонов, ‰;
если , то поправка не вводится, иначе
- отметка в расчетной точке без учета вертикальной кривой;
тангенс вертикальной кривой;
если поправка не вводится - точка лежит за пределами вертикальной кривой), иначе
- поправка от вертикальной кривой;
если то иначе
Выполнение такого расчета в автоматическом режиме предполагает наличие цифровой модели продольного профиля. При расчетах «вручную» такая модель (расчетная схема) также неявно создается.
Моделирование плана позволяет произвести расчет параметров его элементов – прямых, круговых и переходных кривых.
Модель плана существующего пути в прямоугольной системе координат (рис. 2.27) предполагает использование и аналогичной координатной модели плана проектного пути (рис. 2.28). Работа с такими моделями «вручную» настолько трудоемка, что до появления ЭВМ такой подход не использовался.
Рис. 2.27. Координатная модель плана существующего пути
Рис. 2.28. Координатная модель плана проектного пути
Для расчетов (массовых и трудоемких) применялись модели плана (существующего и проектного путей) в криволинейной системе координат, где за ось абсцисс принималась ось существующего пути.
Применялись два типа моделей – угловая диаграмма и график кривизны (стрел).
Использование этих моделей (ценой некоторых допущений и упрощений) позволяет выполнять расчеты параметров элементов плана «вручную», применяя, в том числе, простые и удобные графоаналитические методы.
На угловой диаграмме (рис. 2.29) по оси ординат откладываются углы поворота кривой.
Для проектного пути, укладываемого в правильное геометрическое положение:
- на прямых – угол постоянный,
- на круговых кривых – изменяется линейно,
- на переходных кривых – изменение угла поворота с некоторыми допущениями можно описать квадратной параболой.
Рис. 2.29. Угловая диаграмма
Для придания оси пути правильного геометрического очертания необходимо выполнить сдвиги (рихтовки) его оси на некоторую величину, определяемую расчетом.
При использовании угловых диаграмм величина сдвига:
, где Ug, Uv – углы поворота проектной и существующей оси пути в функции расстояния от начала съемки (угловые диаграммы), S - расстояние от начала съемки до расчетной точки.
Графическая интерпретация интеграла - площадь. Таким образом, – разность площадей проектной и существующей угловых диаграмм.
На графике кривизны (стрел) (рис. 2.30) по оси ординат откладывается кривизна пути (стрелы изгиба). Кривизна – величина обратная радиусу . Стрела (рис. 2.31), f – расстояние от оси пути до хорды определенной длины a, (обычно, 20 м). График кривизны отличается от графика стрел тем, что кривизна определяется в точке, а стрела на хорде. Различия проявляются только в зонах перехода с прямой на переходную кривую и с переходной кривой на круговую кривую.
Рис. 2.30. График кривизны (стрел)
Рис. 3.31. Измерение стрел изгиба
Если стрелу измерять в миллиметрах, то при а = 20 м: .
Для проектного пути, укладываемого в правильное геометрическое положение:
- на прямых – кривизна (стрела) равна нулю,
- на круговых кривых – кривизна (стрела) постоянна,
- на переходных кривых - кривизна (стрела) изменяется линейно.
Сдвиг , где: Kg, Kv– кривизна оси пути в проектном и существующем положениях в функции расстояния от начала участка съемки, s; S – расстояние от начала участка до расчетной точки.
Двойной интеграл вычисляется путем двойного суммирования площадей графика кривизны (стрел).
3. МАТЕМАТИЧЕСКИЕ МЕТОДЫ
3.1. Реализация численной модели на ЭВМ
Нахождение любого, тем более оптимального, проектного решения с неизбежностью требует вариантного подхода.
Использование математических методов позволяет свести число сравниваемых вариантов до необходимого и достаточного минимума, однако, оно всегда велико, и только применение средств вычислительной техники позволяет решить поставленную задачу в приемлемое время.
Фактор затрат машинного времени имеет решающее значение при выборе метода решения конкретной прикладной задачи. «Об эффективном методе решения можно говорить лишь в том случае, если им действительно решаются задачи данного типа на реальных ЭВМ за реальное машинное время» [1].
В соответствии с этим и само понятие метода в вычислительной математике отличается от традиционного, то есть от его представления как последовательности инструкций, выполнение которых с неизбежностью приводит к желаемому результату за конечное число шагов.
Обычно говорят не о методе, а об общем подходе к решению конкретной задачи, который может быть реализован в рамках различных вычислительных схем (численных прикладных методов), среди которых существует и оптимальная, причем эта оптимальность всегда понимается в смысле минимума затрат машинного времени на расчет (при прочих равных условиях).
Говоря о «конкретной проектной задаче» необходимо строго определить ее формальные характеристики в отношении, например, выбора управляемых переменных, целевой функции задачи, системы ограничений, накладываемых на управляемые переменные.
Численный метод еще не является программируемым алгоритмом (который состоит из отдельных операций, протекающих в однозначной последовательности), обладает определенным началом, а также достижимым после конечного числа шагов концом и, следовательно, в принципе может быть реализован машиной.
Критерии выбора метода. Для решения поставленной задачи имеется, как правило, целый ряд методов (подходов). Выбор определенного метода численного решения задачи и его окончательное преобразование в программируемый алгоритм всегда представляют собой попытку оптимизации, причем исходные положения и добавочные требования выступают как дополнительные условия, важнейшими из которых являются следующие:
Исходные положения:
- постановка задачи и предположения о рациональном подходе к ее решению;
- дополнительная информация об исходных данных (числовая область, вид числового материала и др.);
- характеристики вычислительной техники (быстродействие, память и др.);
- представление данных, точность, округление и др.
Требования:
- специальные требования к выходным данным (например, требования к точности, выдача промежуточных результатов, выдача графики, в том числе интерактивной, и др.);
- степень универсальности (должна ли решаться единственная задача, или требуется универсальное программное обеспечение относительно допустимого набора данных);
- минимизация стоимости (времени счета).
Эти условия частично перекрывают друг друга (противоречат) и поэтому при попытке их удовлетворения стараются добиваться определенного оптимума. Для этого используют ряд правил определяемых здравым смыслом и предшествующим вычислительным опытом.
Основой для выбора метода является принцип непосредственного приложения: нужно выбрать по возможности метод, который решает именно поставленную задачу, а не ведет к решению через некоторые подзадачи. «Математически элегантные» решения зачастую являются непросматриваемыми относительно распространения погрешностей и устойчивости, неблагоприятными численно.
Важнейшими причинами чрезмерного накопления погрешностей являются частое использование разностей (приводит к потере значащих цифр) и деления на числа неизвестного порядка (ведет к переполнению разрядной сетки) – этого следует избегать правильной организацией программы.
3.2. Целевая функция. Ограничения
Принимать решения приходится постоянно во всех областях деятельности. В тех случаях, когда ситуация, в которой они принимаются, доступна формализации, весьма полезным может быть использование математического аппарата.

 .
.









 , заданной таблицей – нужно определить значения функции y слева и справа на равном расстоянии
, заданной таблицей – нужно определить значения функции y слева и справа на равном расстоянии  от того значения x, для которого мы хотим подсчитать величину производной, и разделить их разность на h (практически это сводится к приближенному определения тангенса угла наклона касательной, чем меньше h, тем точнее результат (рис. 2.15):
от того значения x, для которого мы хотим подсчитать величину производной, и разделить их разность на h (практически это сводится к приближенному определения тангенса угла наклона касательной, чем меньше h, тем точнее результат (рис. 2.15):
 .
. можно найти интерполяцией.
можно найти интерполяцией. .
. заменяется ее хордой, а площадь под этой дугой (величина интеграла) заменяется площадью получившейся трапеции с вертикальными основаниями (рис. 2.16).
заменяется ее хордой, а площадь под этой дугой (величина интеграла) заменяется площадью получившейся трапеции с вертикальными основаниями (рис. 2.16).
 ,
, .
. равных интервалов. Границы интервалов:
равных интервалов. Границы интервалов: 
 . Длину интервала обозначим h, так что
. Длину интервала обозначим h, так что 
 .
. ,
, .
. ,
, . Для решения уравнения необходимо задание начальных условий: x = x0 и y = y0.
. Для решения уравнения необходимо задание начальных условий: x = x0 и y = y0. , мы найдем величину производной в точке x0:
, мы найдем величину производной в точке x0:  .
. , где Dx – малое приращение x.
, где Dx – малое приращение x. ,
, , где x2 = x1 + Dx. Таким образом, шаг за шагом, можно последовательно вычислять значения функции для различных x.
, где x2 = x1 + Dx. Таким образом, шаг за шагом, можно последовательно вычислять значения функции для различных x. , где
, где  - удельная равнодействующая сила, зависящая от скорости.
- удельная равнодействующая сила, зависящая от скорости. производится на основе графического или аналитического интегрирования основного уравнения движения поезда:
производится на основе графического или аналитического интегрирования основного уравнения движения поезда: .
. интегральная кривая дифференциального уравнения
интегральная кривая дифференциального уравнения  заменяется отрезком прямой (касательной)
заменяется отрезком прямой (касательной)  .
. , и процесс можно повторить для промежутка и
, и процесс можно повторить для промежутка и  т.д. Число h является шагом таблицы.
т.д. Число h является шагом таблицы. , где
, где 
 или
или  (2)
(2) (тангенс угла наклона касательной в геометрической интерпретации) не может быть определена изначально, а вычисляется путем подбора приращения единственной независимой переменной V. Функциональная зависимость величины производной от пути S не входит в правую часть уравнения 2. Это константа, зависящая от приведенного уклона под поездом и изменяющаяся лишь при его изменении, сохраняя все признаки именно константы.
(тангенс угла наклона касательной в геометрической интерпретации) не может быть определена изначально, а вычисляется путем подбора приращения единственной независимой переменной V. Функциональная зависимость величины производной от пути S не входит в правую часть уравнения 2. Это константа, зависящая от приведенного уклона под поездом и изменяющаяся лишь при его изменении, сохраняя все признаки именно константы. , а по среднему знамению равнодействующей
, а по среднему знамению равнодействующей  , где
, где  - начальная и конечная скорость на интервале.
- начальная и конечная скорость на интервале. мин) на площадке с разгоном поезда до установившейся скорости.
мин) на площадке с разгоном поезда до установившейся скорости.


 , где RV - радиус вертикальной кривой (рис. 2.26).
, где RV - радиус вертикальной кривой (рис. 2.26).
 - отметка перелома профиля;
- отметка перелома профиля; - уклон j-го элемента профиля;
- уклон j-го элемента профиля; - разность уклонов, ‰;
- разность уклонов, ‰; , то поправка не вводится, иначе
, то поправка не вводится, иначе - отметка в расчетной точке без учета вертикальной кривой;
- отметка в расчетной точке без учета вертикальной кривой; тангенс вертикальной кривой;
тангенс вертикальной кривой; поправка не вводится - точка лежит за пределами вертикальной кривой), иначе
поправка не вводится - точка лежит за пределами вертикальной кривой), иначе - поправка от вертикальной кривой;
- поправка от вертикальной кривой; то
то  иначе
иначе 
 , где Ug, Uv – углы поворота проектной и существующей оси пути в функции расстояния от начала съемки (угловые диаграммы), S - расстояние от начала съемки до расчетной точки.
, где Ug, Uv – углы поворота проектной и существующей оси пути в функции расстояния от начала съемки (угловые диаграммы), S - расстояние от начала съемки до расчетной точки. – разность площадей проектной и существующей угловых диаграмм.
– разность площадей проектной и существующей угловых диаграмм. . Стрела (рис. 2.31), f – расстояние от оси пути до хорды определенной длины a, (обычно, 20 м). График кривизны отличается от графика стрел тем, что кривизна определяется в точке, а стрела на хорде. Различия проявляются только в зонах перехода с прямой на переходную кривую и с переходной кривой на круговую кривую.
. Стрела (рис. 2.31), f – расстояние от оси пути до хорды определенной длины a, (обычно, 20 м). График кривизны отличается от графика стрел тем, что кривизна определяется в точке, а стрела на хорде. Различия проявляются только в зонах перехода с прямой на переходную кривую и с переходной кривой на круговую кривую.

 .
. , где: Kg, Kv – кривизна оси пути в проектном и существующем положениях в функции расстояния от начала участка съемки, s; S – расстояние от начала участка до расчетной точки.
, где: Kg, Kv – кривизна оси пути в проектном и существующем положениях в функции расстояния от начала участка съемки, s; S – расстояние от начала участка до расчетной точки.