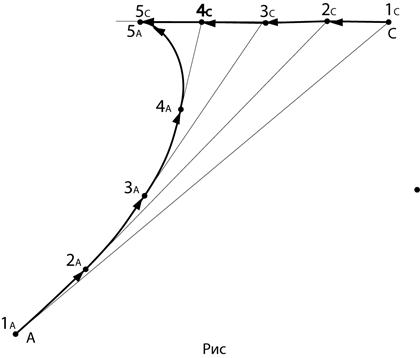
При изложении этой темы будет рассмотрено наведение ДСА на цель и законы управления, реализующие тот или иной метод наведения. Существуют пять классических методов наведения аппарата на цель. 1) Наведение по лучу. 2) Прямое наведение. 3) Наведение с упреждением. 4) Параллельное сближение. 5) Пропорциональное сближение. Эти пять классических методов непосредственно используются в реальных аппаратах или используются как основа для построения реальных методов наведения. Рассмотрим поочередно каждый из пяти классических методов наведения. Наведение по лучу. Суть наведения по лучу состоит в следующем. Рассматриваются три точки. Точка А – точка, в которой находится наводящийся аппарат. Точка С - точка, в которой находится цель. Точка N - точка, из которой визируется цель. Точка N может быть неподвижной или движущейся. Наведение аппарата А по лучу состоит в том, чтобы он оставался на линии, соединяющей точку N и точку С (см. рис.).
Из точки N визируется цель - точка С (измеряется угол ), и визируется аппарат – точка А (измеряется угол ). Вычисляется . Величина передается на аппарат. Система управления траекторией движение аппарата повернет аппарат так чтобы . Если движение аппарата начинается из направления на цель, то траектория аппарата может быть представлена, как показано на рисунке. В начале наведения аппарат находится в точке 1А, а цель – в точке 1С. Встречается аппарат и цель в точке 6А (6С). Особенность траектории наведения по лучу характерна тем, что при отсутствуют участки с бесконечно большой угловой скоростью разворота аппарата. Исторически наведение по лучу начало использоваться на воздушном участке движения аппарата (в системах ПВО). Углы визирования и измерял радиолокатор, размещенный в точке N. Разность по радиоканалу передавалось на аппарат и использовалось в системе управления траекторией движения. При старте аппарата чаще всего , и аппарат выполнял начальный маневр прежде чем выйти кривую сближения по лучу. В настоящее время наведение по лучу используется на воздушном участке при неподвижной и подвижной точке N. На подводном участке движения аппарата непосредственно наведение по лучу не используют. Применяют похожие варианты этого метода, в частности теленаведение. Прямое наведение. Это метод сближения, при котором вектор скорости аппарата непрерывно направляется на цель. Кривую сближения при прямом наведении иногда называют кривой погони или собачьей кривой. Кривая сближения при варианте догона имеет вид
Кривая сближения при варианте встречного движения имеет вид
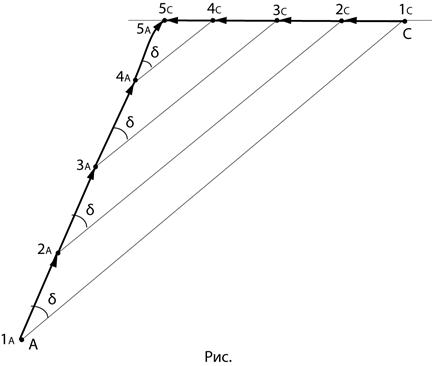
Особенность траектории сближения при прямом наведении состоит в следующем. Независимо каково сближение –встречное или вдогон, аппарат атакует цель сзади. При встречном движении аппарата и цели на заключительном участке сближения требуется большая угловая скорость разворота аппарата , а при возможно потребуется . Иначе случится промах. Реализация больших угловых скоростей разворота аппарата существенно усложняет конструкцию аппарата. Несмотря на этот недостаток метод прямого наведения широко применяется на практике. Это объясняется в основном малым объемом информации при целеуказании – необходимо знать только углы азимута и места. Метод прямого наведения применяется на воздушном и подводном участках движения. Наведение с упреждением. Это метод сближения, при котором угол между направлением скорости аппарата и направлением аппарат – цель остается постоянным. Кривая сближения при наведении с упреждением в варианте догона имеет следующий вид. Символом обозначен угол упреждения. Следует обратить внимание, что аппарат поражает цель под углом к вектору скорости цели, а не точно вдогон. Траектория сближения при встречном движении имеет вид.
На этом рисунке также видно, что аппарат сближается с целью не сзади, а вообще с передней полусферы. Параметры траектории на участке атаки зависят от и углов и . Возможно даже бесконечно большое значение угловой скорости разворота аппарата при атаке ( ). Это возможно при . В случае можно подобрать такой угол упреждения , который не вызывает бесконечно большой угловой скорости разворота. Следует иметь ввиду, что при аппарат вообще не попадет в цель, а будет совершать движение вокруг цели. Параллельное сближение. Это метод сближения, при котором направление аппарат – цель остается в пространстве неизменным. Для прямолинейного движения цели метод параллельного сближения является частным случаем наведения с упреждением. Часто этот метод называют наведением в упрежденную точку. Пропорциональное сближение. Это метод сближения, при котором угловая скорость вращения вектора скорости аппарата пропорциональна угловой скорости вращения линии аппарат – цель. Для написания уравнений движения воспользуемся следующим рисунком
В соответствии с приведенным рисунком для и имеем , ,
. Первое уравнение представляет продольную скорость расстояния между целью и аппаратом. Второе – поперечную скорость расстояния между целью и аппаратом. Третье уравнение описывает зависимость, указанную в определении метода пропорционального сближения. Интегрируя третье уравнение, получим , где начальное значение угла . Если принять и , то получим прямое наведение. Если принять и , то получим прямое наведение с упреждением. Если принять , то будем иметь параллельное сближение. Приведенные уравнения имеют аналитическое решение только для . В других случаях исследования требуется проводить только в численном виде.

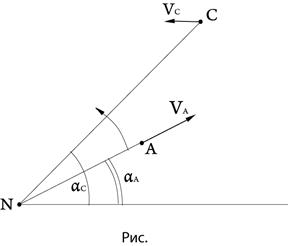
 ), и визируется аппарат – точка А (измеряется угол
), и визируется аппарат – точка А (измеряется угол  ). Вычисляется
). Вычисляется  . Величина
. Величина  передается на аппарат. Система управления траекторией движение аппарата повернет аппарат так чтобы
передается на аппарат. Система управления траекторией движение аппарата повернет аппарат так чтобы  . Если движение аппарата начинается из направления на цель, то траектория аппарата может быть представлена, как показано на рисунке.
. Если движение аппарата начинается из направления на цель, то траектория аппарата может быть представлена, как показано на рисунке.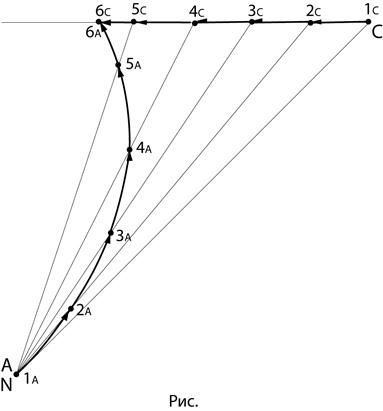
 отсутствуют участки с бесконечно большой угловой скоростью разворота аппарата.
отсутствуют участки с бесконечно большой угловой скоростью разворота аппарата. , и аппарат выполнял начальный маневр прежде чем выйти кривую сближения по лучу. В настоящее время наведение по лучу используется на воздушном участке при неподвижной и подвижной точке N.
, и аппарат выполнял начальный маневр прежде чем выйти кривую сближения по лучу. В настоящее время наведение по лучу используется на воздушном участке при неподвижной и подвижной точке N.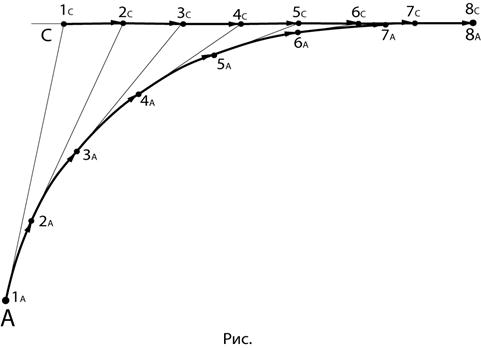
 , а при
, а при  возможно потребуется
возможно потребуется  . Иначе случится промах. Реализация больших угловых скоростей разворота аппарата существенно усложняет конструкцию аппарата.
. Иначе случится промах. Реализация больших угловых скоростей разворота аппарата существенно усложняет конструкцию аппарата. обозначен угол упреждения. Следует обратить внимание, что аппарат поражает цель под углом к вектору скорости цели, а не точно вдогон.
обозначен угол упреждения. Следует обратить внимание, что аппарат поражает цель под углом к вектору скорости цели, а не точно вдогон.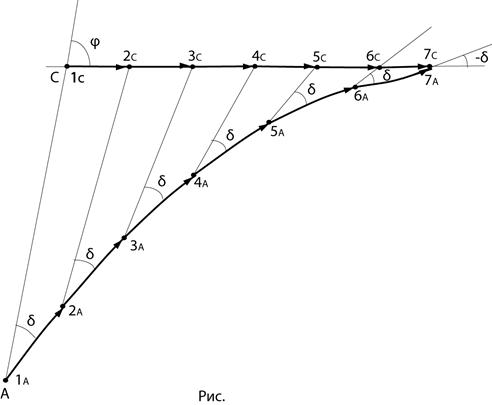
 и углов
и углов  . Возможно даже бесконечно большое значение угловой скорости разворота аппарата при атаке (
. Возможно даже бесконечно большое значение угловой скорости разворота аппарата при атаке (  . В случае
. В случае  можно подобрать такой угол упреждения
можно подобрать такой угол упреждения  аппарат вообще не попадет в цель, а будет совершать движение вокруг цели.
аппарат вообще не попадет в цель, а будет совершать движение вокруг цели.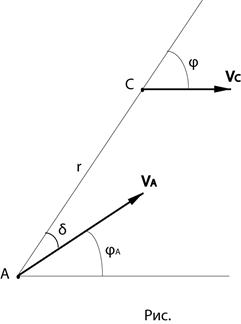
 и
и  имеем
имеем ,
, ,
, .
. ,
, начальное значение угла
начальное значение угла  .
. и
и  , то получим прямое наведение.
, то получим прямое наведение.  , то получим прямое наведение с упреждением.
, то получим прямое наведение с упреждением. , то будем иметь параллельное сближение.
, то будем иметь параллельное сближение. . В других случаях исследования требуется проводить только в численном виде.
. В других случаях исследования требуется проводить только в численном виде.