Кластерные архитектуры используют различные методы доступа к накопителям информации, каждый из которых использует специфическую схему распределения ресурсов, наилучшую для решаемых задач. Тип доступа к внешней памяти может быть независимым от использования ОП, например, кластер типа SMP может быть снабжен как однородным, так и неоднородным доступом к дисковой памяти.
Однородный доступ к дисковой памяти (Uniform Disk Memory Access – UDMA).
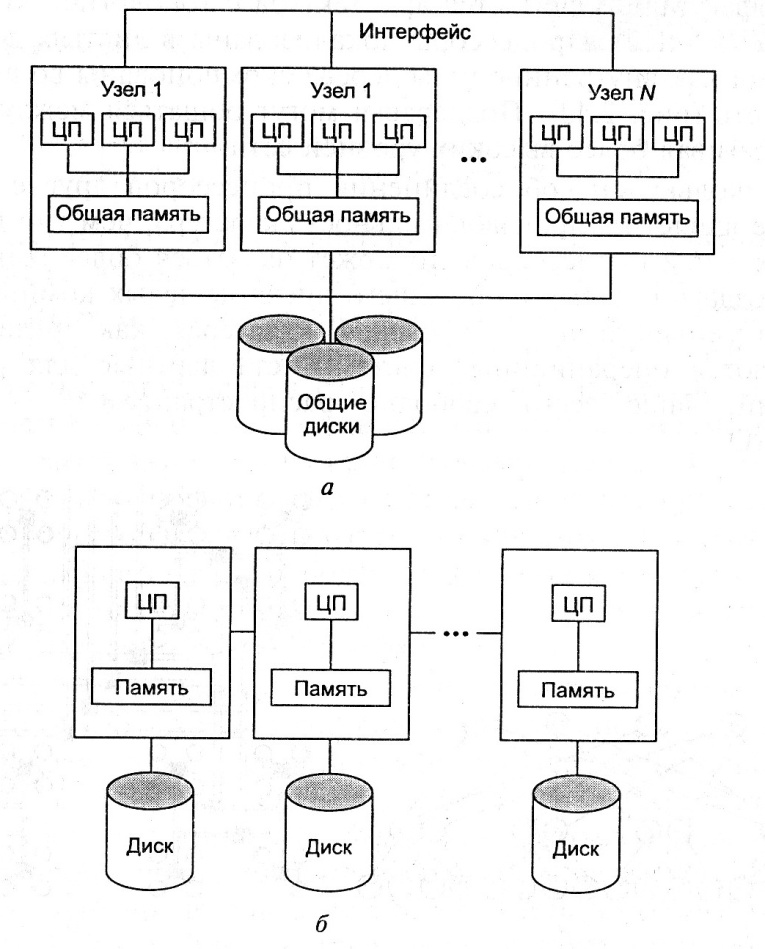
При UDMA (рис. 4.3.1.6, а), затраты на доступ к дискам одинаковы для различных узлов.
Кластер на рис. 4.3.1.6, а состоит из нескольких SMP-узлов. Совместно используемая дисковая система такого типа часто применяется при организации соединения по каналам SCSI или Fibre Channel с большим количеством дисков.
Преимущества UDA:
· высокая доступность данных, даже если некоторые узлы выходят из строя, доступ к данным не нарушается;
· хорошая масштабируемость.
Рис. 4.3.1.6. Разновидности архитектур доступа к дисковой памяти: а – однородный доступ (UDMA); б – неоднородный (NUDMA)
Неоднородный доступ к дискам (Non-Uniform Disk Memory Access - NUDMA).
В таких системах дисковая память подсоединяется непосредственно к узлам, и для каждого узла такой диск является локальным. Для всех других узлов доступ к “чужому” диску должен быть обслужен программными средствами поддержки виртуальных дисков через каналы связи между узлами. Это означает, что затраты на такой доступ возрастают, как в связи с пониженным приоритетом “чужого” процессора, так и за счет задержек коммутации и перегрузки каналов связи.
Преимущества неоднородного доступа к дискам:
· количество узлов не ограничено возможностями системы коммуникации с дисками;
· общий объем дисковой памяти может быть неограниченно увеличен путем добавления узлов.
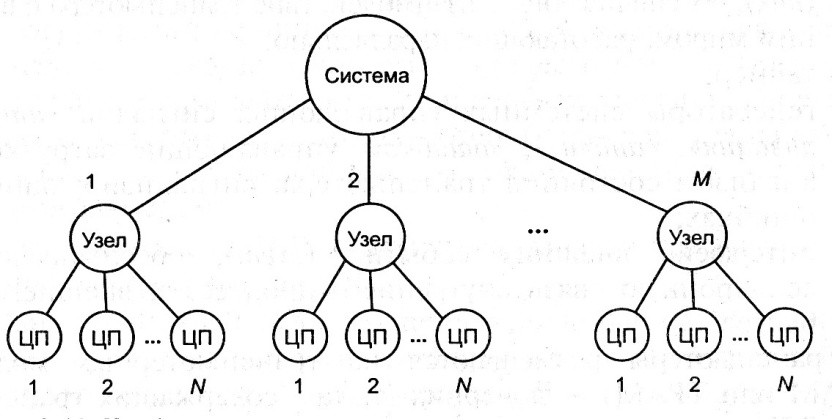
Созвездия. Для определенных кластерных конфигураций в последе время был предложен термин созвездие (constellation) (рис. 4.3.1.7).
Каждый узел кластера есть независимый компьютер с одним или более (N) процессоров. Если в системе всего M узлов, причем численность узла меньше этого количества (N<M), то имеет место кластерная конфигурация, в противном случае (N>M) имеет дело с созвездием.
Рис. 4.3.1.7. Конфигурации вычислительных систем: кластеры и созвездия
Контрольные вопросы:
1. Симметрическая мультипроцессорная обработка Symmetric Multi Processing – ?
2. Когерентность кэшей означает-?
3. Увеличения числа процессоров в SMP ограничена -?
4.Преимуществом SMP является-?
5.Асимметрическая мультипроцессорная обработка ASymmetric Multi Processing (ASMP) –?
13. Доступ к внешней памяти (накопителям) в кластерных структурах -?
14.Однородный доступ к дисковой памяти (Uniform Disk Memory Access )-?
15. Созвездие (constellation) -?
Лекция №1. 1.1 Дифференциальное исчисление.
План:
1. Производная функции, её геометрический и механический смысл. Формулы производных.
2. Изучение производных суммы, произведения, частного функций. Обоснование производных элементарных и сложных функций, обратных функций.
Определение 1: Производная есть скорость изменения функции в окрестности данной точки.
Пусть дана некоторая функция у = у(х). Ее производная определяется следующим образом:
у(х + ∆х) – у(х)
Иначе говоря, производная есть предел отношения приращения функции к бесконечно малому приращению аргумента.
Определение 2: Дифференциалом функции (аргумента) называется бесконечно малое приращение функции (аргумента).
Для той же самой функции у = у(х) дифференциалы имеют следующее обозначения: dx – дифференциал аргумента, dy – дифференциал функции.
dy
С учетом приведенных определений получаем следующую связь между производной и дифференциалами:
(2)
- производная есть отношение дифференциала функции к дифференциалу аргумента.
Определим ГЕОМЕТРИЧЕСКИЙ СМЫСЛ производной и дифференциала. Для этого изобразим фрагмент графика некоторой довольно гладкой функции у = у(х) (рисунок 1).
dy
dx
α
Рисунок1.
Выделим произвольную точку (х;у) на графике и построим касательную L в этой точке.
Зададимся малым приращением аргумента dx, которое, для наглядности. Изобразим покрупнее.
Определим соответствующее приращение функции ∆у и построим хорду L1.
Видим, что при dx → 0 эта хорда, вращаясь вокруг точки (х;у), переходит в касательную L.
Таким образом, при бесконечно малом приращении dx хорда L1 и касательная L НЕРАЗЛИЧИМЫ.
Отметим, что касательная L, совместно с координатными линиями, изображенными на рисунке, образует прямоугольный треугольник. Горизонтальный катет равен dx, вертикальный катет обозначим через dy.
dy
Видим, что при dx → 0 величина dy практически совпадает с приращением функции, ∆у → dy. То есть dy – это ДИФФЕРЕНЦИАЛ функции. Следовательно, учитывая (2) , получаем
(3)
- производная функции равна тангенсу угла между касательной к графику функции в данной точке и осью Ох.
На основании выше приведенных рассуждений можно дать еще одно определение дифференциала функции.
Дифференциалом функции у = у(х) называется ГЛАВНАЯ ЛИНЕЙНАЯ часть приращения функции, соответствующая бесконечно малому приращению dx ее аргумента:
∆у = dy + o(dx), (4)
где
dy = y' · dx. (5)
Пример:
Рассмотрим график некоторой произвольной функции, изображенной на рисунке 2.
Рисунок 2.
Видим, что при х = х1 и при х = х2 производная равна нулю, у' = 0.
Такие точки называются ЭКСТРЕМУМАМИ.
В промежутке х1< х < х2 функция МОНОТОННО УБЫВАЕТ, здесь у' < 0 – производная отрицательна.
При х > х2 функция МОНОТОННО ВОЗРАСТАЕТ, здесь у '> 0 – производная положительна.
Таким образом, по величине и знаку производной можно судить о характере изменения функции:

 Иначе говоря, производная есть предел отношения приращения функции к бесконечно малому приращению аргумента.
Иначе говоря, производная есть предел отношения приращения функции к бесконечно малому приращению аргумента.



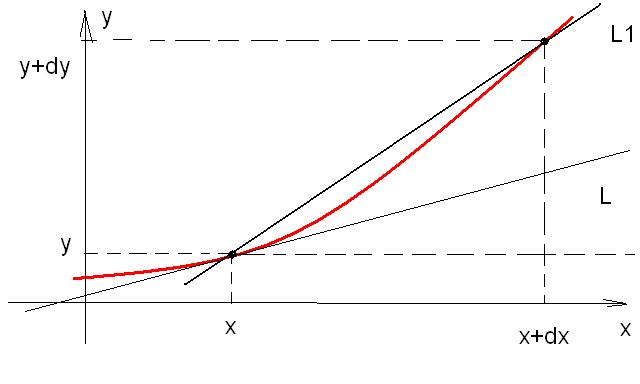

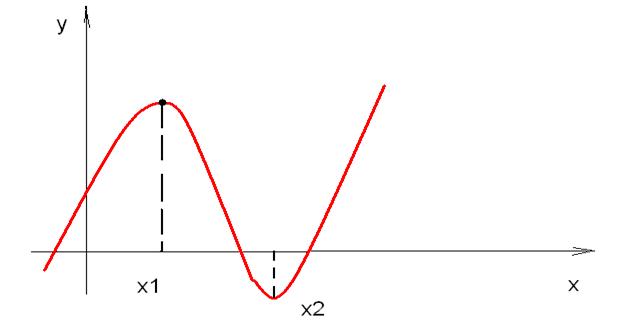
 Рисунок 2.
Рисунок 2.