Фазочастотная характеристика имеет постоянный угол отставания в 900 :
При этом ошибки, возникающие в процессе измерения, можно представить слайдом 29. Величина потерь информации, ∆2и, здесь пропорциональна площади, Sи(iTC) и относится классу инструментальных (в основном – это качество изготовления микросхем). Величина потерь информации, ∆2M, между соседними измерениями пропорциональна площади, SM(iTS) и относится классу методических погрешностей. Она то и вносит наибольший вклад в общую погрешность измерения: ∆2 = ∆2и + ∆2M .
Таким образом, измерительную информацию можно представить в виде последовательности прямоугольных импульсов:
При этом истинное значение измеряемой величины, имеет вид цифровой последовательности:
где: текущее значение инструментальной составляющей погрешности цифровой обработки информации; Xи(iTS) – текущее значение измеряемой величины на выходе АЦП.
Массив измеренной информации, длинной N, обозначим как последовательность текущих измеренных значений измеряемой величины: . И тогда, модель процесса измерения запишется в виде последовательности прямоугольных импульсов:
.
Слайд 29. Физический смысл процедуры измерения (модель отбора)
С текущим значением инструментальной составляющей погрешности цифровой обработки информации, , бороться программными методами невозможно, так как она полностью определяется величиной случайной фазы (см. слайд 30).
Под случайной фазой процесса измерения будем понимать нестационарную случайную величину, , наступления события открывания модуля ввода аналоговой информации для процесса измерения. Тогда, цифровая последовательность истинного значения измеряемой величины примет вид:
Слайд 30. К понятию случайной фазы процесса измерения
Для создания условий стационарности и эргодичности последовательности текущих значений измеряемой величины необходимо и достаточно, чтобы закон распределения, f(e) имел вид:
Тогда, модель отбора измеренных значений из нестационарного случайного процесса будет иметь вид:
,
где e – случайная фаза.
Восстановление аналогового сигнала по цифровым значениям, хранящимся в памяти ЭВМ - это пожалуй самая основная, причина больших потерь информации. Это связано с тем, что восстанавливающий элемент, с помощью которого осуществляется восстановление функции из дискретной последовательности отсчетов, относится к классу физически нереализуемых линейных динамических операторов.
В промышленных измерительных и управляющих системах восстанавливающий элемент – это модуль УСО для вывода аналоговой информации (регистраторы, дисплей компьютера), динамические характеристики которого целесообразно описывать восстанавливающим элементом нулевого порядка.
Из Слайда 31 видно, что равенство спектров нарушается [7] даже в случае ограниченного спектра исходного сигнал и в восстановленном сигнале появляется составляющая систематической методической динамической погрешности процесса восстановления непрерывного сигнала из дискретных значений измеряемой величины, ∆2M .
Передаточная функция модуля УСО для вывода аналоговой информации (ЦАП) имеет вид:
,
а, следовательно, амплитудно-частотная и фазочастотная характеристики модуля вывода аналоговой информации (МВВА) имеют тот же внешний вид, как и характеристики модуля ввода аналоговой информации (МВА) (см. слайд 26). Отличие только в настроечных коэффициентах модулей.
И, тогда, детерминированная стационарная последовательность прямоугольных импульсов регистратора (МВВА) (см. слайд 29) имеет вид:
Массив хранимой информации, длинной N, запишется как:
где: ∆2 (iTS) – текущее значение погрешности измерения истинного значения измеряемой величины, X(t).
Следует обратить внимание (см. слайд 31), что инструментальная составляющая ошибки цифровой обработки, ∆2и , практически не изменилась, а вот методическая составляющая цифровой обработки информации, ∆2M , стала на много меньше. То есть потери информации на много сократились.
Таким образом, регистраторы (МВВА) являются программируемыми фильтрами измерительной информации (см. слайд 32). Следовательно, с этими потерями информации можно бороться программными методами. Использование фильтрующей способности цифровой обработки информации широко используется в информационно-измерительных подсистемах робастных систем.
Слайд 31. Восстановленный спектр, как результат работы вторичного прибора
Слайд 32 Фильтрующая способность цифровой обработки информации
Итак, если за модельмодуля УСО для вывода аналоговой информации взять весовую функцию в виде прямоугольного импульса:
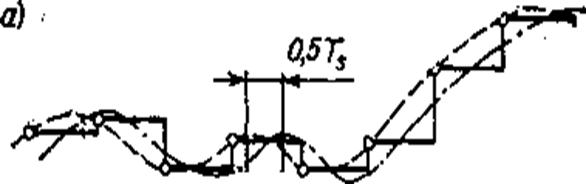
То, последовательность измеренных и восстановленных значений случайного процесса будет иметь вид непрерывной, кусочно-линейной зависимости (см. слайд 33).
Слайд 33. Восстановленные (ступенька), измеренные значения(пунктир) и истинные значения измеряемой величины (штрих пунктир)
Анализ цифровых последовательностей в робастной системе управления показывает, что свойства показаний программно-аппаратного измерительного канала зависят только от свойств элементов измерительного канала.
Таким образом, только функция отбора
обеспечивает стационарность в широком смысле случайной последовательности, получаемой из исходного непрерывного стационарного случайного сигнала, каковым является любой измеряемый параметр объекта управления.




 текущее значение инструментальной составляющей погрешности цифровой обработки информации; Xи(iTS) – текущее значение измеряемой величины на выходе АЦП.
текущее значение инструментальной составляющей погрешности цифровой обработки информации; Xи(iTS) – текущее значение измеряемой величины на выходе АЦП. . И тогда, модель процесса измерения запишется в виде последовательности прямоугольных импульсов:
. И тогда, модель процесса измерения запишется в виде последовательности прямоугольных импульсов: .
.
 , бороться программными методами невозможно, так как она полностью определяется величиной случайной фазы (см. слайд 30).
, бороться программными методами невозможно, так как она полностью определяется величиной случайной фазы (см. слайд 30). , наступления события открывания модуля ввода аналоговой информации для процесса измерения. Тогда, цифровая последовательность истинного значения измеряемой величины примет вид:
, наступления события открывания модуля ввода аналоговой информации для процесса измерения. Тогда, цифровая последовательность истинного значения измеряемой величины примет вид:
 ,
,
 ,
,