Основная идея кодового разделения линий связи (CDMA – Code Division Multiple Access) заключается в том, что в одной и той же полосе частот можно использовать сигналы, которые не влияют друг на друга. Для их получения подбирается система сигналов, свободных в точке приема от взаимных влияний друг на друга. На передающей стороне формируется и передается через линию связи широкополосный сигнал с распределенной энергией. На приемной стороне этот сигнал умножается на соответствующий сигнал из системы сигналов, использовавшихся на передающей стороне, и интегрируется. В результате, на приемной стороне выделяется сигнал соответствующего абонента (датчика).
Рассмотрим процесс передачи и приема сигналов в CDMA детальнее.
Сигналы отдельных каналов представляются в виде:
Uxk(t) = Uk(t) · gk(t),
где gk(t) – сигнал-носитель;
Uk(t) – сигнал соответствующего датчика.
Сигнал, поступающий в линию связи, представляется в виде
U(t ) = .
Если gk(t) линейно независимы, они могут быть разделены линейными фильтрами. Такие многоканальные системы передачи носят название линейных. К линейным относятся, в частности, системы с частотным, временным, фазовым разделением и разделением по форме.
В качестве системы линейно независимых сигналов используются различные системы ортонормированных сигналов, для которых существует общий метод разделения, основанный на применении оператора корреляционной фильтрации к сигналу, поступающему из линии связи.
Рассмотрим процесс выделения на приемной стороне сигнала k-го источника.
Сигнал, принятый из линии связи, умножается на gk(t) и затем интегрируется:
U(t)·gk(t) = gk(t)· [ ·gi(t)].
После интегрирования получим
· [ ·gi(t)] · dt ,
где a, b – интервал времени, на котором система функций gi(t) ортонормированна.
Покажем, что в результате этих действий (умножения и интегрирования) получим на приемной стороне переданный сигнал от k-го источника:
· [ · gi(t)] · dt =
Внесем под знак суммы gk(t)
= [ ·gi(t) ·gk(t)]·dt =
Поменяем местами порядок выполнения действий
= · gi(t) ·gk(t) · dt. (8.1)
Для продолжения преобразований воспользуемся формулой интегрирования по частям:
òp ·dv = pv – òv · dp .
Для этого интеграл · gi(t) · gk(t) · dt представим в виде
· d =
(дифференциал от интеграла равен под интегральной функции)
В полученном результате Uk(a) – значение сигнала k-го источника сигнала в начальный момент времени, Uk(b) – значение сигнала k-го источника сигнала в конце передачи, т.е. это некоторая постоянная величина, на которую смещен сигнал по оси ординат.
Таким образом, на выходе интегратора получим переданный сигнал, только смещенный по оси ординат. Технически смещение можно легко устранить, например, пропустив сигнал (8.3) через конденсатор.
Следовательно, умножив сигнал, принятый из линии связи, на соответствующий каналу сигнал ортонормированной системы сигналов и затем, проинтегрировав произведение, получим переданный сигнал.
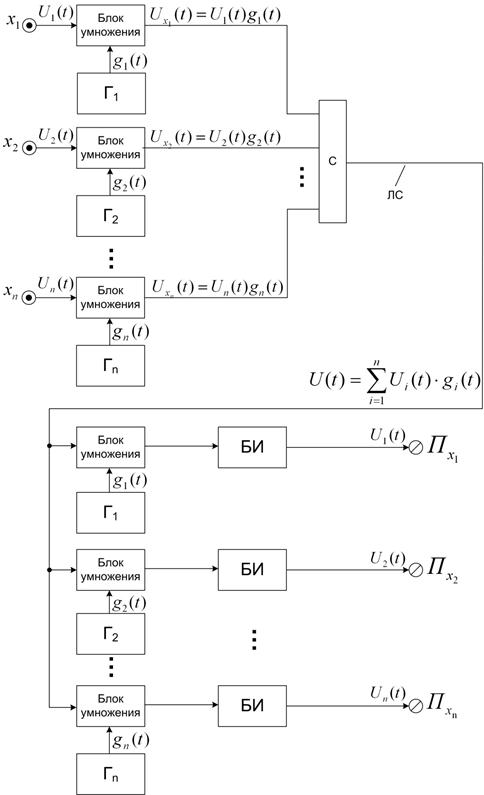
Структурная схема многоканальной системы с кодовым разделением приведена на рис. 8.6.
Эффективность кодового метода разделения состоит в том, что он позволяет значительно ослабить влияние перекрестных помех.
В реализациях локальных систем автоматического управления могут использоваться следующие схемы разделения.
Рис. 8.6. Структурная схема многоканальной системы с кодовым разделением: X1–Xn – источники сигналов; Г1–Гn – генераторы сигналов ортонормированный системы сигналов g1–gn; С – сумматор; БИ – блоки интегрирования; Пх1–Пхn – приемники сигналов

 .
. ·gi(t)].
·gi(t)]. · [
· [  [
[  · gi(t) ·gk(t) · dt. (8.1)
· gi(t) ·gk(t) · dt. (8.1) · gi(t) · gk(t) · dt представим в виде
· gi(t) · gk(t) · dt представим в виде · d
· d  =
= ·gk(t) ·dt –
·gk(t) ·dt –  {
{  ·d [Ui(t)] = 0 – 0 = 0.
·d [Ui(t)] = 0 – 0 = 0. , поэтому из выражения (8.2) получим
, поэтому из выражения (8.2) получим = Uk(t) · 1 – Uk(t)│
= Uk(t) · 1 – Uk(t)│  =
=  · [
· [