ЦВМ открыли большие возможности для использования информации, снимаемой с объекта, для улучшения качества управления или характеристик регулятора. Широкое распространение получили адаптивные, самонастраивающиеся системы, в которых реализуется автоматическая подстройка параметров системы на основе анализа и обработки информации об эффективности процесса регулирования.
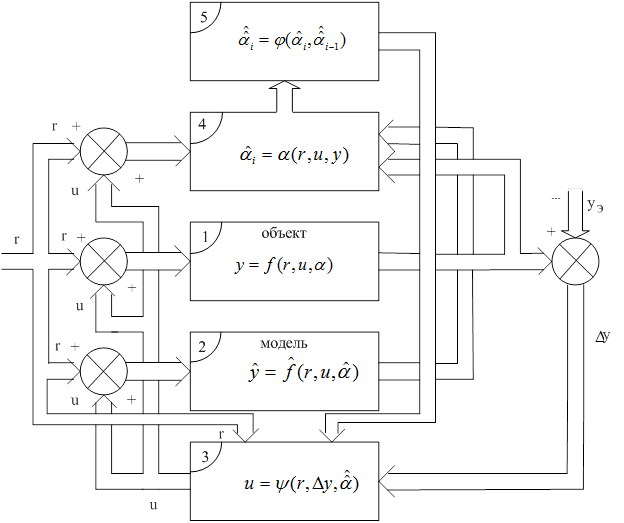
Рис. 9.1. Общая схема адаптивной системы управления (r, u - входы, - параметры).
1-й блок – это реальный объект, точное описание которого неизвестно. 2-й блок – более или менее точное его описание, 3-й – закон управления.
Модель (2-й блок) – приближённая и объект изменяется во времени. Улучшение модели называется идентификацией (повышение её точности). Идентификация имеет 2 стороны:
структурная;
параметрическая.
Под структурной идентификацией понимается приближение структуры модели к реальной так, чтобы она наилучшим образом отражала объект. Так как объекты могут быть самыми различными (механическими, экологическими и др.) нельзя придумать формальных методов структурной идентификации.
4-й блок (рисунок 9.1) отражает параметрическую идентификацию. Параметрическая идентификация – это улучшение значений параметров модели с целью повышения точности модели. Точность всегда понимается как разность между прогнозируемым и тем, что получаем.
5-й блок (рисунок 9.1) осуществляет адаптацию параметров регулятора.
Адаптация означает подстройку параметров регулятора, его самообучение. Параметры регулятора зависят от параметров объекта и обычно выражаются через них. Изначально параметры объекта не всегда известны с достаточной степенью точности или “плывут” во времени, что и вынуждает прибегать к адаптации. Поэтому адаптации – изменению характеристик регулятора – обычно предшествует процедура уточнения характеристик объекта по результатам измерения входных и выходных величин, которая называется идентификацией. Вопросы идентификации и адаптации получили резкое развитие в последние 25-30 лет, благодаря быстрому росту ресурсов цифровых контроллеров с одновременным снижением их стоимости.
Главная отличительная особенность адаптивных систем от систем с постоянными параметрами состоит в том, что они могут автоматически приспосабливаться к изменяющимся внешним условиям, могут обучаться подстройкой регулятора. Используются два основных способа подстройки регулятора.
Если изменяющиеся динамические свойства объекта доступны контролю по измеряемым внешним факторам и известно, как должен настраиваться регулятор в зависимости от параметров объекта, то можно использовать прямой метод настройки или адаптацию по разомкнутому контуру
Рис. 9.2. (А - адаптер, Р – регулятор, О – объект).
Если характеристики объекта измерить и оценить непосредственно нельзя, то используют адаптацию по замкнутому контуру (с обратной связью). В этом случае в систему вводится второй контур управления, который управляет не поведением объекта, а структурой и параметрами регулятора.
Адаптивные регуляторы с обратной связью можно разделить на два класса: самостабилизирующиеся регуляторы и регуляторы с эталонной моделью.
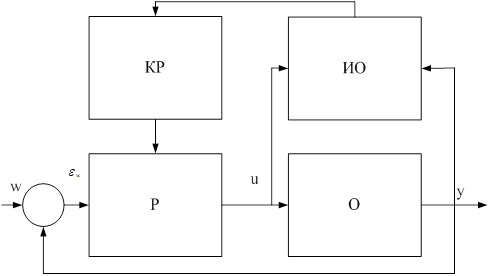
В самонастраивающейся системе имеется идентификатор, который постоянно определяет параметры объекта, и корректор регулятора, который на основании заданного критерия оптимальности сопоставляет текущие значения параметров объекта с теми, на основании которых функционирует регулятор, принимает решение об изменении характеристик регулятора и реализует это решение.
В этой системе можно выделить этапы:
1. Идентификация объекта или системы в целом.
2. Расчет коррекции регулятора.
3. Коррекция (настройка) регулятора, изменение его структуры.
Рис. 9.3.
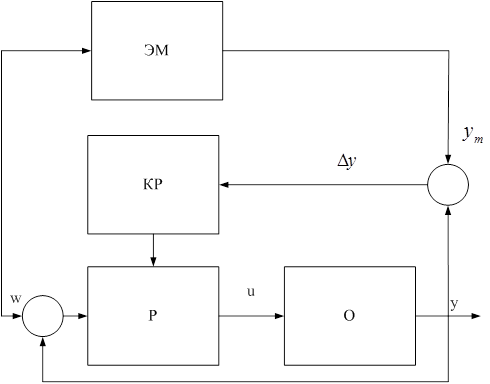
При использовании эталонной модели задача состоит в такой настройке замкнутого контура управления, чтобы реакция системы на некоторый сигнал была бы максимально близка к реакции на этот сигнал эталонной модели. В этом случае должен измеряться некоторый внешний сигнал (эталонное воздействие r(t) в следящей системе) и адаптация осуществляется в те моменты, когда этот сигнал начинает изменяться. Здесь тоже выделить три этапа:

 - параметры).
- параметры).



 Сравнение реакции контура и эталонной модели.
Сравнение реакции контура и эталонной модели.