При исследовании задач слежения и проектировании регуляторов или алгоритмов управления используют для характеристики качества систем среднее значение квадрата ошибки слежения Ce(t) и среднее значение квадрата управляющей переменной C u(t), которые определяются так:
(8.22)
(8.23)
где - ошибка (8.24)
и u(t) – векторы соответствующей размерности, r(t) – заданное значение текущей величины, We(t), Wu(t), t ³ t0 – неотрицательно определённые весовые матрицы, которые задают приоритеты компонент векторов e и u по отношению друг к другу.
Для получения выражений для ошибки и управления записываются уравнения объекта и регулятора, из них исключаются (подставляются друг в друга) управления из уравнений объекта и выходные величины из уравнений регулятора. В результате определяется выходная величина, которая подставляется в (8.24), а результат в (8.22), управления подставляются в (8.23). Таким образом, величины (8.22), (8.23) выражаются через матрицы (характеристики) объекта и регулятора. Это позволяет выбрать параметры регулятора так, чтобы удовлетворить ряд принципов проектирования систем регулирования.
8.5. Некоторые принципы проектирования
Основной принцип проектирования. При проектировании систем следует добиваться самого низкого из возможных среднего значения квадрата ошибки слежения, не допуская при этом превышения средним значением квадрата управляющей переменной некоторого заданного значения.
Принцип проектирования. Система должна быть асимптотически устойчивой.
При анализе характеристик (8.22), (8.23) процесс управления делится на переходный и установившийся период. Продолжительность переходного периода ограничивается временем установления установившейся ошибки.
Эталонную переменную можно представить в виде
r(t) = r0 + r v(t), (8.25)
где r0 - стохастический вектор – постоянная часть эталонной переменной,
r v(t) - переменная часть эталонной переменной.
Обозначим T(p) – передаточную функцию замкнутой системы от r(t) до управляемой переменной z(t); выходная переменная, как и раньше, y(t); N(p) – матричная передаточная функция замкнутой системы от эталонной переменной r(t) на управляющую переменную u(t).
Пусть , (8.26)
. (8.27)
Тогда для простого случая скалярных r, u, y, z и We = 1, Wu = 1 можно получить следующие выражения
å r (w) |T(iw) – 1|2 df , (8.28)
. (8.29)
Первое слагаемое характеризует зависимость от установившегося значения r0, а второе – от переменной составляющей эталонного сигнала.
Анализ соотношения (8.28) позволяет сделать некоторые выводы. Т.к. основной принцип состоит в , то отсюда следует принцип проектирования: чтобы обеспечить малое установившееся среднее значение квадрата ошибки слежения, передаточную функцию T(p) линейной системы управления с постоянными параметрами следует выбирать таким образом, чтобы выражение
å r (w) |T(iw) – 1|2 (8.30)
принимало малые значения для всех действительных частот. В частности, если заданные точки нулевые, то значение T(0) должно быть близким к 1.
В задачах регулирования переменная часть эталонной переменной å r (w) = 0 и нужно, чтобы T(0) =1. Под интегралом (8.28) стоит выражение (8.30). Обычно å r (w) имеет существенное значение в области низких частот и убывает с ростом частоты, см. рис. 8.1.
Рис. 8.1. (А-амплитуда или мощность å).
Поэтому для того, чтобы получить малое (8.30) необходимо, чтобы |T(iw) – 1| было малым в области низких частот, где å r (w) велико.
В связи с этим вводится понятие полосы частот системы и входного сигнала.
Пусть T(p) – скалярная передаточная функция асимптотически устойчивой линейной системы с постоянными параметрами и скалярными управлением и управляемой переменной. Тогда полосой частот системы управления является множество частот w, w ³ 0, для которых
| T(iw) – 1 | £ e (8.31)
где e - заданное число, малое по сравнению с 1.
Если полоса частот представляет собой интервал [w1, w2], то разность w2 - w1 является полосой пропускания системы.
Если интервал имеет вид [0, wс], то wс называется частотой среза системы.
Рис. 8.2. Иллюстрация низкочастотной системы.
Если ε = 0.01 (1%), то wс называется однопроцентной частотой среза.
Пусть r(t) скалярный стационарный в широком смысле стохастический процесс со спектральной плотностью år(w) . Полоса частот W процесса r(t) определяется как множество частот w, w ³ 0, для которых
å r (w) ³ a (8.32)
Значение a выбирается так, чтобы полоса частот содержала заданную часть 1 - e (e<< 1) половины энергии процесса, т.е.
(8.33)
Если полоса представляет собой интервал [w1, w2], то разность w2 - w1 является полосой пропускания процесса.
Если интервал имеет вид [0, wс], то wс называется частотой среза процесса.
Рис. 8.3.
[0, wс] – низкочастотная часть процесса, При e = 0.01 говорят об 1% частоте среза. При этом [0, wс] содержит 99% от половины энергии процесса (спектра).
С учетом этих понятий из (8.28), (8.30) следует принцип проектирования: для получения малого значения ошибки слежения необходимо, чтобы полоса частот системы управления содержала как можно большую часть полосы пропускания эталонной переменной. Если заданные точки (частоты) нулевые, то следует стремиться, чтобы Т(0) было близким к 1.
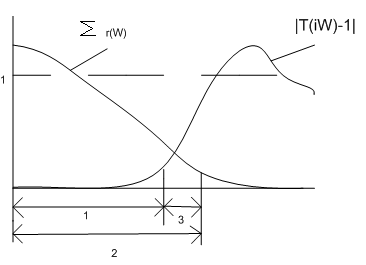
Рис. 8.4. (иллюстрирует сказанное: (år(w), |T(iw) – 1|), 1 – полоса пропускания системы, 2 – полоса пропускания входного процесса
(эталонной переменной), 3 – диапазон частот эталонной переменной, неперекрываемый полосой пропускания системы, который и будет приносить наибольший вклад в среднее значение квадрата ошибки слежения.)
Входная переменная должна быть минимальной. Это требование отражено в следующем принципе проектирования:
в асимптотически устойчивой линейной системе с постоянными параметрами со скалярным входом и выходом для получения малого установившегося среднего значения квадрата входной переменной необходимо, чтобы
(8.34)
принимало малые значения для всех действительных значений w. Для этого необходимо делать |N(iw)| малым в полосе частот эталонной переменной. Принцип не касается N(0), входящего в (8.29), которое ориентировано на постоянную часть эталонной переменной. Второй член в (8.29) определяет изменение входной переменной относительно начального состояния. Из сопоставления принципов проектирования видно, что удовлетворить их можно изменением передаточных матриц Т(р) и N(p). Но можно показать, что они связаны соотношением Т(р) = К(р)N(р), поэтому изменять их независимо нельзя и нужен компромисс, найти который и должен проектировщик системы.
8.6. Оценка длительности переходных процессов
Установившаяся ошибка или состояние системы достигаются после некоторого переходного процесса, в котором значения ошибки могут быть существенно больше. Поэтому длительность переходных процессов желательно уменьшать.
Временем установления определенного процесса (среднего значения квадрата ошибки, например) называется время, в течение которого переменная достигает установившегося значения в пределах заданной точности. Если точность 1% от максимального отклонения от установившегося значения, то говорят об 1% времени установления. В начальный момент ошибка может быть большой.
Отсюда принцип проектирования: система должна быть спроектирована так, чтобы время установления среднего значения квадрата ошибки слежения было по возможности малым.
В соответствии с (8.28) среднее значение квадрата ошибки слежения состоит из двух частей. Одна обусловлена переменной составляющей эталонной переменной, а другая - постоянной. Поведение составляющей от переменной части оценивается дисперсией, которая находится трудоёмким решением матричного дифференциального уравнения. Анализ поведения в переходном процессе составляющей от постоянной части эталонной переменной проще. Его можно выполнить, анализируя переход системы из ненулевых начальных условий и реакцию на ступенчатое входное воздействие эталонной переменной. Для асимптотически устойчивой линейной системы с постоянными параметрами некоторую информацию можно получить из расположения на плоскости полюсов замкнутой системы. Все реакции такой системы представляют собой экспоненциально демпфированные движения с постоянными времени, равными отрицательным обратным величинам действительных частей характеристических чисел замкнутой системы. Поскольку 1%-е время установления экспоненциального процесса эталонной переменной
(8.35)
равно 4,6q, граница для 1%-го времени установления ts какой-либо переменной определяется формулой:
(8.36)
где li , i = 1,2, …,n - характеристические числа системы. Заметим, что для квадрата переменной время установления равно половине времени, необходимого для самой переменной.

 (8.22)
(8.22) (8.23)
(8.23) - ошибка (8.24)
- ошибка (8.24) и u(t) – векторы соответствующей размерности, r(t) – заданное значение текущей величины, We(t), Wu(t), t ³ t0 – неотрицательно определённые весовые матрицы, которые задают приоритеты компонент векторов e и u по отношению друг к другу.
и u(t) – векторы соответствующей размерности, r(t) – заданное значение текущей величины, We(t), Wu(t), t ³ t0 – неотрицательно определённые весовые матрицы, которые задают приоритеты компонент векторов e и u по отношению друг к другу.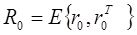 , (8.26)
, (8.26) . (8.27)
. (8.27)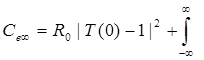 å r (w) |T(iw) – 1|2 df , (8.28)
å r (w) |T(iw) – 1|2 df , (8.28) . (8.29)
. (8.29) , то отсюда следует принцип проектирования: чтобы обеспечить малое установившееся среднее значение квадрата ошибки слежения, передаточную функцию T(p) линейной системы управления с постоянными параметрами следует выбирать таким образом, чтобы выражение
, то отсюда следует принцип проектирования: чтобы обеспечить малое установившееся среднее значение квадрата ошибки слежения, передаточную функцию T(p) линейной системы управления с постоянными параметрами следует выбирать таким образом, чтобы выражение

 (8.33)
(8.33)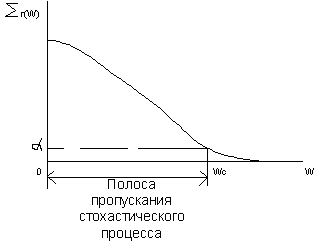
 (8.34)
(8.34) (8.35)
(8.35) (8.36)
(8.36)