Отрицательное число характеризуется тем, что перед старшим разрядом ставится бит знака s.
5.7.1. Представление с поразрядным дополнением до двух
Представление с помощью знака и модуля затрудняет сложение положительных и отрицательных чисел. При появлении знака «минус» сумматор должен переключаться в режим вычитания. Представление с поразрядным дополнением до двух (обычно кратко называемое дополнительным кодом) избавляет от этой необходимости.
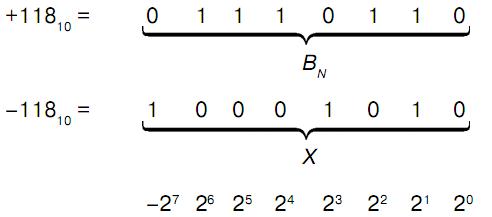
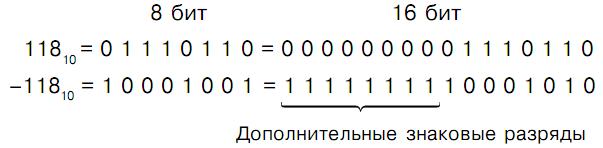
При таком способе старшему разряду присваивается отрицательный вес, а остальная часть числа отображается в обычном двоичном виде. В описанном случае длина слова также должна быть фиксированной ради однозначности определения старшего разряда. Если число положительное, старший бит равен 0. У отрицательного числа старший бит равен 1, поскольку только данный разряд имеет отрицательный вес.
Пример.
Для слова длинной 8 бит:
Переход от положительного числа к отрицательному, равному ему по модулю, несколько затруднен по сравнению с представлением через знак и модуль. Пусть двоичное число BN без знакового бита характеризуется словом длиной N. Тогда знаковый разряд имеет значение –2N. Поэтому число –BN принимает вид
–BN = –2N + X.
Тогда положительный остаток X составит:
X = 2N – BN.
Это выражение называется поразрядным дополнением до двух (дополнительным кодом) BN(2) для BN и легко рассчитывается по BN. Рассмотрим наибольшее число, представимое с помощью N двоичных разрядов. Его значение равно
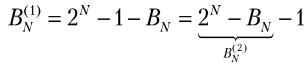
Если из указанного числа вычесть произвольное двоичное число BN, получим, очевидно, двоичное число как результат поразрядного вычитания, называемое поразрядным дополнением до единицы (обратным кодом) BN(1) для BN. Тогда
и BN(2) = BN(1) +1.
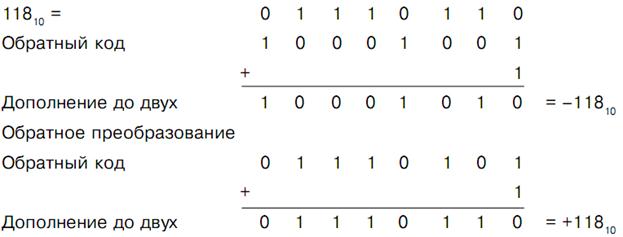
Таким образом, поразрядное дополнение двоичного числа до двух (дополнительный код) получается путем дополнения до единицы во всех разрядах и добавления единицы к образовавшемуся числу.
Легко показать, что для смены знака нужно не манипулировать знаковым разрядом в отдельности, а просто сформировать дополнение до двух целого числа вместе со знаковым разрядом. Следовательно, для двоичных чисел в дополнительном коде имеет место соотношение
-BN = BN(2).
Оно справедливо для случая, когда в полученном результате рассматриваются
только N разрядов, а разряды переполнения игнорируются.
Пример.
Для 8-разрядного двоичного числа в дополнительном коде:
5.7.2. Расширение знакового разряда
Если требуется представить положительное число в виде слова с большим числом
разрядов, старшие разряды просто заполняют нулями. Для чисел в дополнительном коде действует иное правило: слово дополняется соответствующим количеством знаковых разрядов.
Пример.
Лекция №6.
Тема лекции: Программируемые логические контроллеры в судовых системах управления.
Цель лекции: Ознакомление с современными тенденциями реализации автоматических устройств на базе программируемых логических контроллеров.
Использование микроэлектронных средств в изделиях производственного и культурно-бытового назначения не только приводит к повышению технико-экономических показателей изделий (стоимости, надежности, потребляемой мощности, габаритных размеров) и позволяет многократно сократить сроки разработки и отодвинуть сроки "морального старения" изделий, но и придает им принципиально новые потребительские качества (расширенные функциональные возможности, модифицируемость, адаптивность и т.д.).
За последние годы в микроэлектронике бурное развитие получило направление, связанное с выпуском однокристальных микроконтроллеров, которые предназначены для "интеллектуализации" оборудования различного назначения. Однокристальные (однокорпусные) микроконтроллеры представляют собой приборы, конструктивно выполненные в виде БИС и включающие в себя все составные части "голой" микро-ЭВМ: микропроцессор, память программ и память данных, а также Программируемые интерфейсные схемы для связи с внешней средой. Использование микроконтроллеров в системах управления обеспечивает достижение исключительно высоких показателей эффективности при столь низкой стоимости (во многих применениях система может состоять только из одной БИС микроконтроллера), что микроконтроллерам, видимо, нет разумной альтернативной элементной базы для построения управляющих и/или регулирующих систем. К настоящему времени более двух третей мирового рынка микропроцессорных средств составляют именно однокристальные микроконтроллеры.
Применение микроконтроллеров, начинавшееся с цифровых часов и микрокалькуляторов, в настоящее время продолжает расширяться, и оправдано не только малыми размерами, весом и энергопотреблением при высокой надежности и низкой стоимости этих микросхем. Главной причиной эффективности использования микроконтроллеров является их функциональная универсальность, которая обусловлена возможностью их программирования. Именно программирование позволяет одной и той же микросхеме решать сотни различных задач в составе десятков тысяч различных устройств. Это позволяет организовать производство микропроцессоров большими тиражами, а следовательно достичь их низкой стоимости. Чрезвычайно высокие затраты на разработку и подготовку производства микропроцессоров распределяются на сотни тысяч и миллионы изделий и становятся приемлемыми. По этой же причине (необходимость повышения тиража изделий) в судовой автоматике микропроцессоры используются, как правило, не непосредственно в блоке предназначенном для решения конкретной задачи (как например, блок управления бытовой стиральной машиной), а в составе программируемых логических контроллеров (ПЛК). ПЛК рассчитаны на решение более широкого класса задач, и потому производятся тиражами способными окупить затраты на разработку и сертификацию. При установке на судне они конфигурируются для решения конкретной задачи.
В 1968 году компания Modicon разработала концепцию программируемого логического контроллера - устройства, отвечающего широкому кругу потребностей, возникающих при управлении технологическими процессами, и обладающего малыми размерами. Программируемый логический контроллер (ПЛК) - это устройство, аналогичное компьютеру, используемое для того, чтобы автоматизировать технологический процесс, например, управление судовым оборудованием. Там, где старые автоматические системы использовали сотни и тысячи исполнительных реле и кулачковых механизмов, стал нужен один контроллер. ПЛК состоит из центрального устройства управления (ЦПУ), источника питания (на основе постоянного или переменного тока) и модулей в соответствии с требованиями решаемой задачи, таких как:
- модули ввода для подключения датчиков, кнопок и других входных сигналов:
- модули вывода для подключения исполнительных механизмов, световой индикации, клапанов и т.п.;
- коммуникационные модули;
- модули удаленного ввода-вывода;
- специализированные, так называемые «Экспертные» модули, такие как высокоскоростные счетчики, модули взвешивания;
- модули управления перемещениями рабочих органов станков и машин.
ПЛК работает строго циклически: получение входов (значения входов из модулей формируют образ памяти ЦПУ) - обработка данных в памяти и вычисления по программе - обновление выходов. Время цикла контроллера зависит от размера программы, сложности обработки и мощности ЦПУ. Время цикла обычно составляет величину порядка нескольких десятков миллисекунд и ограничено сверху встроенным механизмом защиты, называемым «сторожевой таймер». ПЛК отличается от компьютера надежностью работы и простотой обслуживания. Модули ПЛК можно легко заменять, и контроллер возобновляет работу очень быстро.
Высокая гибкость использования ПЛК дает множество преимуществ на каждом этапе жизненного цикла технологического оборудования.
Отдельные ЛПК соединяются между собой с помощью коммуникационных сетей. Коммуникационные сети появлялись постепенно, сначала в виде шин последовательного обмена. Обмен данными был формализован в виде протоколов, таких как M0DBUS (1979. сокращение от MODicon BUS). Этот протокол за короткое время стал фактическим стандартом последовательного обмена цифровыми данными в промышленности. В течение последнего десятилетия начали широко применяться сети и полевые шины. Это основа архитектуры систем автоматизации технологических процессов. Они являются мощными средствами обмена данными, мониторинга и диагностирования подключенных к ним устройств. Полевые шины и сети постепенно привели к пересмотру архитектуры системы автоматизации судового оборудования:
- исчезает необходимость в традиционном удаленном подключении устройств ввода-вывода с помощью сигнальных соединений;
- интерфейсы ввода-вывода рассредоточены;
-система управления строится как децентрализованная и распределенная система;
- организована связь с Интернетом.
Переход к цифровым системам управления судовыми установками на базe специализированных микроконтроллеров позволил обеспечить новый, недостижимый в аналоговых системах, уровень показателей качества:
- на порядок меньшие габариты и вес управляющей электроники;
- резкое повышение надежности (фактическое время наработки на отказ достигает 100000 час и выше) и срока службы (до 10 лет и более);
- быструю и качественную интеграцию отдельных судовых установок в систему комплексной автоматизации производства с помощью унифицированных интерфейсов сопряжения с системами управления более высокого уровня и соответствующих средств программной поддержки (RS-232, RS-485, CAN);
- местное и дистанционное управление;
- интерактивный дружественный интерфейс с человеком-оператором на языке страны использования привода: отображение на встроенном дисплее информации о текущем состоянии данной судовой установки и значениях наблюдаемых переменных; ввод команд оперативного управления со встроенной клавиатуры; настройка параметров судовой установки и системы управления в процессе пуско-наладочных работ с сохранением значений в энергонезависимой памяти; интерактивная справочная система и система подсказок стратегии управления в реальном времени;
- встроенный и удаленный (по сети) мониторинг состояния установки и раннее предупреждение аварийных ситуаций в технологическом оборудовании, возникающих вследствие срабатывания защит или идентификации отказов;
- конфигурирование структуры системы управления самим пользователем в процессе запуска установки в эксплуатацию для адаптации к конкретной технологии или специфике применения судовой установки;
- встроенное управление средствами судовой установки сопутствующей дискретной автоматикой без использования дополнительных промышленных программируемых контроллеров и управляющих ЭВМ;
- распределенное мультимикропроцессорное управление многоосевыми приводами роботов, манипуляторов, кабельных линий и т.п. с использованием локальных промышленных сетей, например, CAN, с широкими возможностями синхронизации, вплоть до систем электрического вала, распределенного позиционного и контурного управления;
- унификацию встроенных средств управления приводами (контроллеров, модулей ввода-вывода, пультов оперативного управления) независимо от типа исполнительного двигателя, структуры силового канала, типов используемых датчиков обратных связей;
- простую систему наращивания мощности комплектного электропривода за счет использования секционируемых исполнительных двигателей (например, вентильно-индукторных), каждая секция которых управляется от отдельного типового преобразователя с объединением систем управления всеми преобразователями в локальную промышленную сеть;
- возможность использования самых современных структур и алгоритмов управления приводами, которые трудно, а порой и невозможно реализовать на аналоговой элементной базе: векторного управления двигателями переменного тока; прямого управления моментом; прямого частотно-токового управления; управления с элементами фаззи-логики; прямой программной реализации по графам переходов дискретных управляющих автоматов любой сложности.
ПЛК для работы в судовых системах управления в настоящее время выпускаются десятками фирм. Рассмотрим их применение на двух примерах.
DataChief C20 - это система автоматики, в которой подключение и обработка сигналов распределена между несколькими блоками обработки DPU (Distributed Processing Unit), которые обмениваются информацией по резервированной сети CAN (Controller Area Network).
Аварийные сигналы и события формируются в DPU и доступны как для локальной, так и для удаленной операторских станций. Изменение установок (пределов, выдержек времени, пуск/остановка, открытие/закрытие) и параметров возможно через локальную или удаленную операторскую станцию.
Удаленные операторские станции обмениваются информацией по одиночной или дублированной локальной сети LAN (Local Area Network), подключенной к сети CAN через одно или несколько сопрягающих устройств.
Системы DataChief C20 конфигурируются, тестируются и сертифицируются до поставки. Сервисный инженер имеет портативный РС с программой для конфигурации и ввода в действие системы, что позволяет модифицировать и расширять систему в период ввода в действие.
После сдачи системы документация может быть распечатана на месте.
Блоки распределенной обработки (DPU), удаленные операторские станции (ROS) и концентраторы (HUBs) включены в систему диагностики реального времени, которая отслеживает работу каждого модуля и связь между модулями.
Система диагностики сообщает оператору обо всех неисправностях.
Если DataChief подключена к FleetMaster Information Management System, диагностика может выполняться дистанционно с берега. Это позволяет выполнять дистанционное и непосредственное наблюдение за эксплуатацией и ремонтом системы без дорогостоящих вызовов сервисных инженеров.
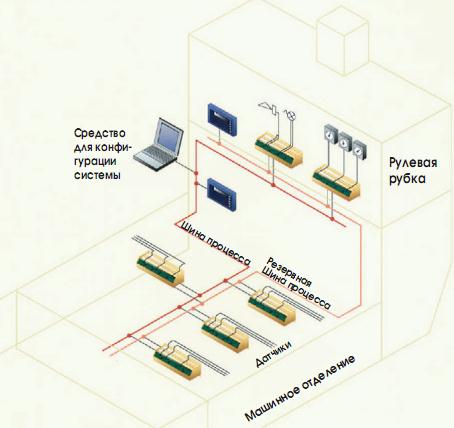
Конфигурация системы для небольших судов, где важны малые размеры и вес показана на следующем рисунке. Количество каналов - от 16 до 200. DPU могут устанавливаться в любом месте, если позволяет степень защиты (IP).