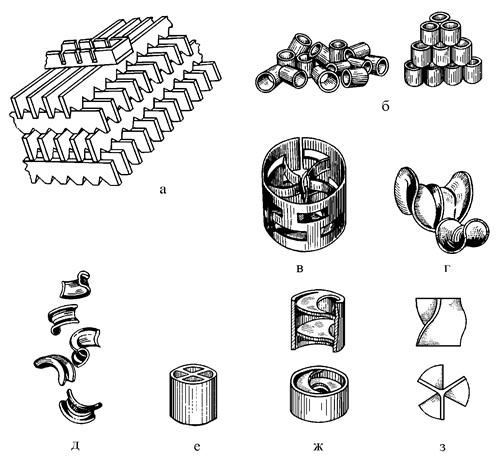
Данные аппараты представляют собой вертикальные цилиндрические колонны, заполненные твердой насадкой, предназначенной для увеличения поверхности контакта фаз. Отдельными элементами насадки могут служить тела довольной сложной формы. Разработано множество вариантов их конструкций (рис.2.9)
Рис. 2.9. Виды насадок: а) деревянная хордовая; б) кольца Рашига в навал и с упорядоченной укладкой: в) кольцо с вырезанными и внутренними выступами (кольцо Паля); г) керамические седла Берля; д) седла «Инталокс»; е) кольцо с крестообразными перегородками; ж) кольцо с внутренними спиралями; з) пропеллерная насадка.
Как правило, насадочные аппараты работают при противоточным движении фаз: жидкая фаза подается сверху, а газовая – снизу. По мере стекания жидкости по колонне нарушается равномерность ее распределения, возникает ²пристеночный эффект² - около стенки расхода жидкости больше, чем в центральной части живого сечения аппарата.
Для предотвращения этого явления насадку укладывают секциями (Н – высота секции, D – диаметр колонны) (рис.2.10).
В зависимости от относительной скорости движения газовой и жидкой фаз в насадочном аппарате можно выделить различные режимы его работы.
Пленочный режим реализуется при малых скоростях газа, что позволяет не учитывать его влияние на пленочное гравитационное течение жидкости.
Режим подвисания наблюдается при увеличении скорости газа, приводящей к торможению внешних слоев жидкой пленки, увеличению ее толщины и количеству удерживаемой жидкости.
Режим захлебывания (эмульгирования) достигается дальнейшим увеличением скорости газа. Наступает инверсия фаз - жидкость заполняет весь свободный объем насадки и становится сплошной фазой, а газ пробулькивает сквозь нее в виде отдельных пузырьков.
Режим уноса наблюдается при еще больших скоростях газа, когда жидкость выносится из аппарата.
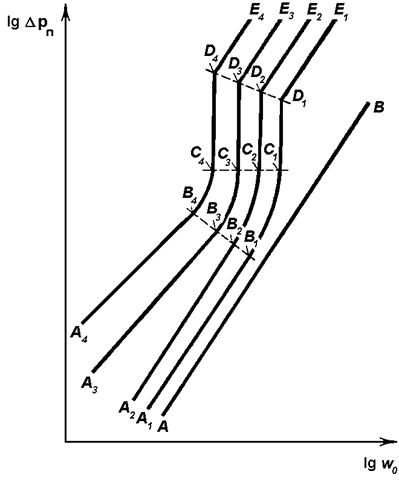
При различных плотностях орошения будут аналогичные данные, но смещенные по координате .
Рис.2.11. Зависимости гидравлического сопротивления насадочного абсорбера Dpп от фиктивной скорости газа w0: АВ - для сухой насадки; AiBiCiDiEi - при различных увеличивающихся плотностях орошения; Bi - точки начала подвисания; Ci - точки начала захлебывания (инверсии); Di - точки начала уноса.
В справочной литературе имеются соотношения, позволяющие определить границы между режимами.
Выбор насадки.
Основные требования к насадкам:
- большая удельная поверхность ,
- большая пористость ,
- высокая прочность и химическая стойкость,
- низкая стоимость,
- низкие гидравлические сопротивления,
- хорошая смачиваемость жидкостью.
Универсальной насадки удовлетворяющей всем этим требованиям не существует.
Наиболее широкое распространение в промышленности получили кольца Рашига.
В промышленности применяются регулярные насадки и насадки навалом.
Тарельчатые абсорберы.
Тарельчатые абсорберы представляют собой, как правило, вертикальные цилиндрические колонны с горизонтальными перфорированными перегородками (тарелками), служащими для увеличения поверхности контакта фаз. Тарельчатые абсорберы обычно противоточные, жидкость подается сверху колонны, газ – снизу.
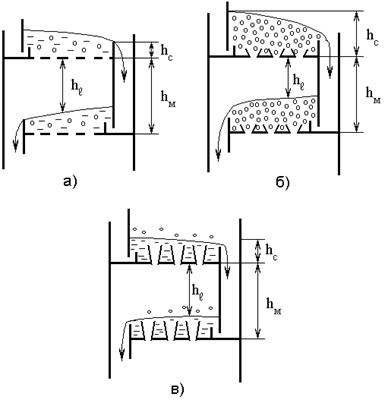
По способу перетока жидкости с верхних тарелок на нижние тарельчатые аппараты подразделяются на аппараты со сливными устройствами и без них (провальные). Наиболее распространены аппараты со сливными устройствами и перекрестным движением фаз (рис.2.12). В зависимости от фиктивной скорости движения газа можно выделить три основных режима: пузырьковый, пенный и струйный.
Рис.2.12 Гидравлические режимы работы ситчатых тарельчатых аппаратов при перекрестном движении фаз: а) пузырьковый; б) пенный; в) струйный.
Рассмотрим устройство наиболее широко используемых в промышленности тарелок с перекрестным движением фаз.
Ситчатые тарелки изображены на рисунках 2.12 и 2.13.Они представляют собой плиту с отверстиями 3 – 8 мм. Они просты, имеют низкие гидравлические сопротивления, высокоэффективны. Основной недостаток ситчатых тарелок – узкий диапазон устойчивой работы. Они чувствительны к загрязнениям.
Рис. 2.13. Геометрические характеристики ситчатой тарелки: D - диаметр колонны;
Fр - рабочее сечение тарелки; - длина пути жидкости.
Колпачковые тарелки представляют собой плиту с достаточно крупными отверстиями (более 30 мм), к которым приварены патрубки. Над каждым патрубком установлен колпачок. Колпачки имеют прорези. Газ поступает на тарелку через патрубки, а затем разбивается прорезями колпачка на множество мелких струй, проходя сквозь слой жидкости. Недостатками колпачковых тарелок – значительные гидравлическое сопротивление, металлоемкость.
Рис. 2.14. Устройство колпачковой тарелки: 1 - переливная перегородка;
Клапанные тарелки совмещают достоинства колпачковых и ситчатых тарелок. Они выполняются в виде плит с достаточно крупными отверстиями (круглые, квадратные), закрытыми сверху клапанами. В зависимости от расхода газа клапаны автоматически действием собственного веса регулируют степень открытия отверстия, приподнимаясь над ним. В случае прекращения подачи газа клапаны закрывают отверстия и жидкость через отверстия не протикает.
Рис. 2.15. Устройство тарелки с прямоугольными клапанами:
а) клапан закрыт; б) клапан полуоткрыт;
в) клапан полностью открыт.
1 - клапан; 2 - ограничительная скоба.
Общим недостатком тарелок со сливными устройствами и перекрестным движением фаз является наличие градиента уровня жидкости - разности уровня жидкости на входе и на выходе с тарелки. Разность уровня жидкости на тарелке нарушает однородности ее работы.
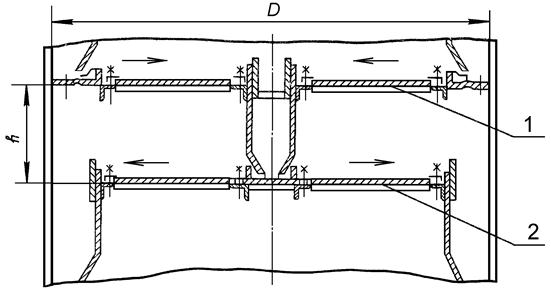
Для снижения эффекта градиента уровня жидкости используется двухпоточные тарелки (рис.2.17).
Рис. 2.17. Двухпоточные тарелки с центральным (1) и боковым (2) сливом.
Они представляют собой чередование тарелок с боковым и центральным сливом жидкости. Такая конструкция позволяет в два раза уменьшить как длину пути жидкости, так и ее скорость. Таким образом существенно уменьшается градиент уровня жидкости.
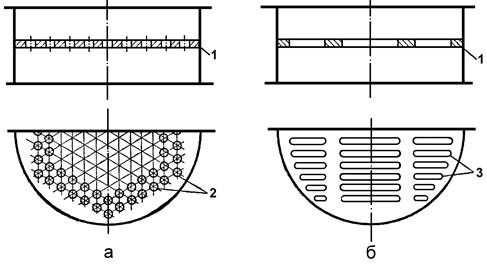
Рассмотрим тарелки без сливных устройств. Они называются провальными, так как жидкость проваливается с верхней тарелки на нижнюю через отверстия для прохода газа. Эти аппараты противоточные. В рабочем режиме на тарелке образуется слой жидкости. При этом возможные те же режиме взаимодействия, что и для тарелок со сливными устройствами – пузырьковой, пенный, струйный. Применяются дырчатые, решеточные и волнистые тарелки (рис.2.18).
Рис. 2.19. Устройство провальных тарелок: а) дырчатая; б) решетчатая;
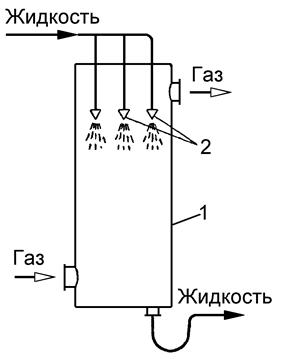
Распыливающие аппараты.
В распыливающих абсорберах поверхность межфазного контакта создается диспергированием жидкости в газовом потоке. По способу диспергирования жидкости эти аппараты подразделяются на следующие группы:
Форсуночный полый абсорбер (рис.2.20) представляет собой полую колонну, по которой снизу вверх движется поток газа, а сверху с помощью форсунок распыливается жидкость. Допускается небольшие скорости газа (2 – 3 м/с). Реализуется небольшие объемные коэффициенты массопередачи. Применяются для поглощения хорошо растворимых газов.
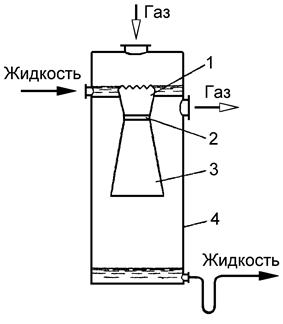
В скоростных прямоточных абсорберах (абсорберы Вентури) (рис.2.21) жидкость захватывается и диспергируется газовым потоком большой скорости (20 – 30 м/с).
В механических абсорберах диспергирование жидкости происходит с помощью вращающихся устройств (дисков, валов, лопастей и т.д). Направление движения фаз может быть различным. Механические абсорберы достаточно эффективны, однако они более сложны.
Поэтому соответствующие переменные x1 , x2 , x3 можно взять в качестве базисных переменных. При этом x4, x5 – свободные переменные.
Заметим, что сведя эту задачу ЛП к стандартному виду с двумя переменными, легко решить ее геометрически. Но у нас сейчас задача другая – рассмотреть идею симплекс-метода.
Итак, x4 и x5 - свободные переменные. Выразим через них базисные переменные:
x1 = 2 – x4 – x5
x2 = 7 – 2x4 – 3x (3)
x3 = 2 + x4 + 3x5 ,
а целевая функция в этом примере уже выражена через свободные переменные:
F = 3 – x4 + x5 → min.
Замечание. Запись (3) задает общее решение СЛУ (1): перебирая все значения свободных переменных x4 и x5, и вычисляя по формулам (3) соответствующие значения базисных переменных x1 , x2 , x3, получим все решения СЛУ (1).
Положим x4 = 0 и x5 = 0, тогда из (3) x1 = 2, x2 = 7, x3 = 2. Соответствующее базисное решение х(1) = (2, 7, 2, 0, 0) оказывается допустимым (неотрицательным), но, скорее всего, не оптимальным. Ему соответствует значение целевой функции F(x(1)) = 3. Как перейти к другому допустимому базисному решению, улучшив также при этом значение целевой функции? Можно ли это сделать за счет изменения (увеличения от 0) x4 или x5? Глядя на целевую функцию (2), видим, что переменная x5 входит в F с положительным коэффициентом, поэтому увеличивать ее нет смысла. А увеличение х4 разумно, оно уменьшает F. До какого предела можно увеличивать х4 (при фиксированном х5=0)? Ведь рост этой переменной в соответствии с условиями (3) вызывает изменение базисных переменных и они в какой-то момент могут перестать быть неотрицательными.
Из ограничений-равенств (3) следует что:
x1 < 0 при x4 > 2 (минимальное значение !)
x2 < 0 при x4 > 3,5
x3 > 0 при любых х4 .
Вывод: Можно и нужно увеличивать х4 до значения, равного 2 (при больших х4, нарушается условие неотрицательности x2 ), при этом получим (в силу (3)) решение:
В новом решении, как и в предыдущем, две нулевые компоненты. Попытаемся привести систему (1) к новому базису, в котором соответствующие переменные x1 и x5 будут свободными переменными (тогда можно будет убедиться, что x(2) - базисное решение). Для этого выразим «новые» базисные переменные x2, x3 , x4 через «новые» свободные переменные x1 и x5.
При этом, как говорят, переменная x4 вводится в базис, а x1 выводится из базиса.
Из первого уравнения в (3) выразим новую базисную переменную x4:
x4 = 2 – х1 – х5.
Заметим, что это именно то уравнение, которое «остановило» рост х4 в (3). Подставив это выражение для x4 в два других уравнения в (3) и в целевую функцию, получим следующее представление системы ограничений в новом базисе:
x2 = 3 + 2х1 – х5
x3 = 4 – х1 + 2х5
x4 = 2 – х1 – х5
F = 1 + x1 +2x5 → min
В новом базисном решении F(x(2)) = 1. Так как все коэффициенты целевой функции положительны, никакие допустимые изменения свободных переменных не уменьшают целевой функции. Таким образом, мы имеем в точке х(2) = (0, 3, 4, 2, 0) оптимум (минимум).
Замечание. В этой задаче оптимальное решение найдено за один шаг (итерацию). Если в новом базисе целевая функция имела бы отрицательный коэффициент (при свободной переменной), следовало бы проделать вторую итерацию, аналогичную первой. Сходимость симплекс-метода следует из того, что число допустимых базисов конечно, не превосходит числа сочетаний из n (число всех переменных) по m (ранг системы ограничений-равенств). Однако полный перебор всех- допустимых базисов не происходит, так как на каждой операции значение целевой функции улучшается.
Резюме. Симплекс-метод состоит в переходе от одного допустимого базисного решения к другому, причем так, что на каждом шаге значение целевой функции улучшается. Он находит оптимальное решение за конечное число шагов (или устанавливает, что оптимума нет – задача несовместна или неограничена).
Пример: как перейти от базиса к базису
1)2x1 + x2 – x3 = 3
x1 + x3 – x4 = -2
3x1 - x3 + x5 = 1
x1 x2 x3 x4 x5 ∑
x2 2 1 -1 0 0 3 5
x4 1 0 2 1 0 -2 2
x5 3 0 -2 0 1 1 3
Соответственно базис: (0, 3, 0, -2, 1). Перейдем к другому базису, введя в число базисных переменных х3 и выведя х4:
Придем к недопустимому базису x(2) = (2, 0, 3, -5, 0). Введение в базис переменной x1 с выведением x4 привело бы нас к допустимому базису
Как осуществить переход от допустимого к допустимому базису.
разрешающий столбец Aj (вводимый в базис) должен содержать хотя бы один положительный элемент aij > 0.
для всех положительных элементов этого столбца Ajнадо подсчитать отношение bi/aij и выбрать строку i, для которой оно минимум.
Алгоритм симплекс-метода. Симплекс-таблицы
Шаги симплекс-метода принято выполнять с помощью т.н. симплекс таблиц. Рассмотрим их на следующем примере:
x1 -x4 - 2x6 = 5
x2 + 2x4 - 3х5 + x6 = 3
x3 + 2x4 - 5х5 + 6x6 = 5
F = x1 + x2 + x3 → min
В таблицу вносятся коэффициенты при переменных в ограничениях и свободные члены. Коэффициенты целевой функции вносятся (с противоположными знаками) в последнюю строку. Последний столбец содержит контрольные суммы по строкам. Первый столбец содержит обозначения текущих базисных переменных. В правую нижнюю ячейку вносится свободный член целевой функции.
В исходной форме примера целевая функция содержит базисные переменные. Чтобы исключить их и выразить ее только через свободные переменные, добавим к последней строчке таблицы три первых. Получим: F = 13 - 3x4+8x5 – 5x6.
В нашем примере система ограничений-равенств уже приведена к базису.
В общем случае единичные базисные столбцы формируются из исходной таблицы методом Гаусса. Однако при этом может получиться недопустимое базисное решение (некоторые базисные переменные могут получить отрицательные значения). Получение исходного допустимого базиса – отдельная задача, обсудим позже.
Для перехода от исходного допустимого базиса к очередному необходимо выбрать некоторую «новую» переменную xj, знак коэффициента при которой в последней строке таблицы положителен (то есть в целевой функции отрицателен). Кроме того, необходимо соблюдение двух правил, обеспечивающих допустимость очередного базиса:
1. Разрешающий столбец Aj (вводимый в базис) должен содержать хотя бы один положительный элемент aij > 0.
2. Для всех положительных элементов этого столбца Aj надо подсчитать отношение bi/ aij и выбрать строку i, для которой оно минимально – ведущую строку.

 (Н – высота секции, D – диаметр колонны) (рис.2.10).
(Н – высота секции, D – диаметр колонны) (рис.2.10).
 .
.
 ,
, ,
,
 - периметр слива; Fс - сечение перелива;
- периметр слива; Fс - сечение перелива; - длина пути жидкости.
- длина пути жидкости.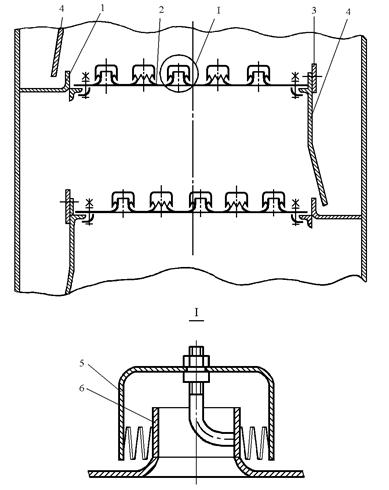
 Рис. 2.15. Устройство тарелки с прямоугольными клапанами:
а) клапан закрыт; б) клапан полуоткрыт;
в) клапан полностью открыт.
1 - клапан; 2 - ограничительная скоба.
Рис. 2.15. Устройство тарелки с прямоугольными клапанами:
а) клапан закрыт; б) клапан полуоткрыт;
в) клапан полностью открыт.
1 - клапан; 2 - ограничительная скоба.
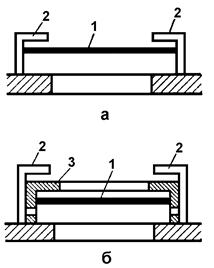 Рис. 2.16. Устройство клапанных
тарелок с круглыми клапанами:
а) обычная клапанная тарелка;
б) балластная тарелка.
1 - клапан; 2 – кронштейн-
ограничитель; 3 - балласт.
Рис. 2.16. Устройство клапанных
тарелок с круглыми клапанами:
а) обычная клапанная тарелка;
б) балластная тарелка.
1 - клапан; 2 – кронштейн-
ограничитель; 3 - балласт.
 x2 = 3 + 2х1 – х5
x2 = 3 + 2х1 – х5 Пример: как перейти от базиса к базису
Пример: как перейти от базиса к базису
 x2 2 1 -1 0 0 3 5
x2 2 1 -1 0 0 3 5

 x1 -x4 - 2x6 = 5
x1 -x4 - 2x6 = 5
 x1 x2 x3 x4 x5 x6 b ∑
x1 x2 x3 x4 x5 x6 b ∑ 5/6 x3 0 0 1 2 -5 6 5 9
5/6 x3 0 0 1 2 -5 6 5 9